采用计算机生成随机激励的水电站水轮机模型辨识方法
- 国知局
- 2024-08-01 00:22:37
本发明涉及模型参数辨识领域,尤其涉及一种水电站水轮机模型参数辨识的方法。
背景技术:
1、水轮发电机组是水电站水力发电的重要组成部分,在用电过程中,除了安全供电外,还需要将电压与频率稳定在给定值的小范围内。而水轮机调节系统从结构上包含引水系统、随动系统、调速器、水轮机、发电机等部件构成,包含水力电力机械等复杂非线性的控制系统,由于客观条件限制,很难对其进行精确的建模以及真机试验。因此分析研究其模型参数辨识方法以及开展辨识试验,建立不同情况下的精确模型可以为机组稳定运行奠定基础,具有重要的工程价值与实践意义。目前水轮机控制调节系统广泛采用的pid控制,如果能够辨识出系统更为精确的模型与参数,能够给水轮机的控制以及pid参数整定提供更好的理论基础,从而能够提高水电机组的动态品质,获得更为令人满意的机组控制效果。目前参数辨识中采用的方法有引力搜索算法、蚁狮优化算法、神经网络算法等等,但上述算法往往非常复杂,对数据要求较高,计算量大等等。在上述背景下,本发明提出了一种基于利用随机理论与自适应参数辨识相结合的水轮机模型参数辨识方法,具有操作简单方便计算量小,辨识精度高的优点。
2、需要说明的是,在上述背景技术部分发明的信息仅用于加强对本发明的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本发明的目的在于提供采用计算机生成随机激励的水电站水轮机模型辨识方法,进而在一定程度上克服传统离模型参数辨识精度不高、适用范围不广的问题。
2、根据本发明的一个方面,提供采用计算机生成随机激励的水电站水轮机模型辨识方法,包括以下步骤:
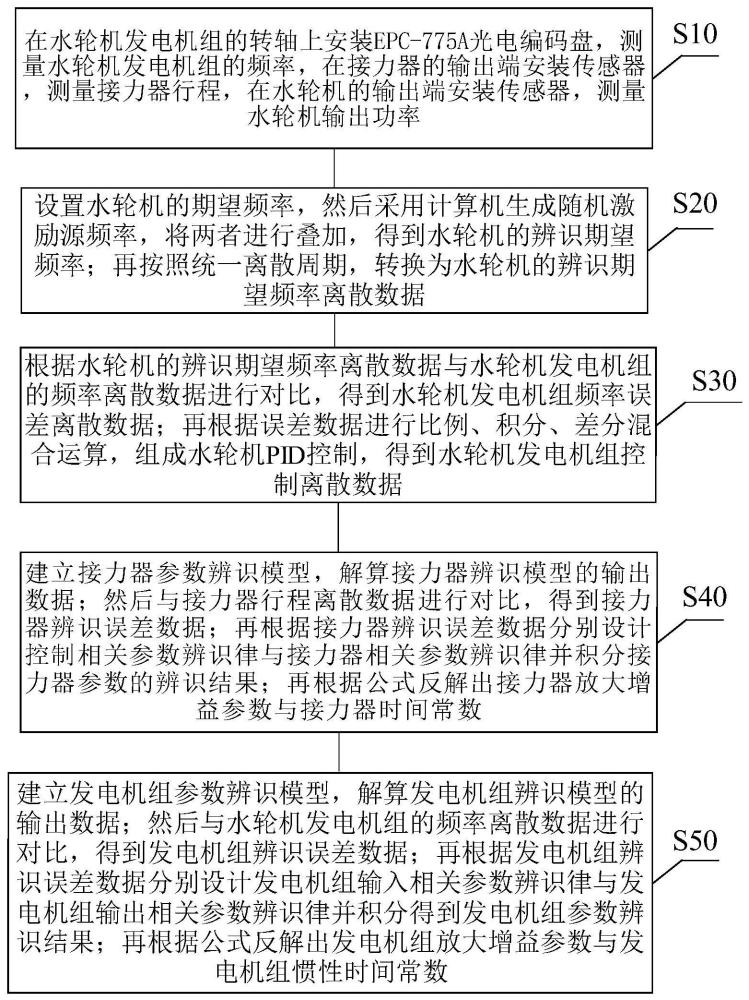
3、步骤s10,在水轮机发电机组的转轴上安装epc-775a光电编码盘,测量水轮机发电机组的频率,在接力器的输出端安装传感器,测量接力器行程,在水轮机的输出端安装传感器,测量水轮机输出功率,设定统一离散周期,将上述数据转化为统一周期离散数据;分别得到水轮机发电机组的频率离散数据、接力器行程离散数据、水轮机输出功率离散数据。
4、步骤s20,设置水轮机的期望频率,然后采用计算机生成随机激励源频率,将两者进行叠加,得到水轮机的辨识期望频率;再按照统一离散周期,转换为水轮机的辨识期望频率离散数据。
5、步骤s30,根据水轮机的辨识期望频率离散数据与水轮机发电机组的频率离散数据进行对比,得到水轮机发电机组频率误差离散数据;再根据误差数据进行比例、积分、差分混合运算,组成水轮机pid控制,得到水轮机发电机组控制离散数据。
6、步骤s40,建立接力器参数辨识模型,解算接力器辨识模型的输出数据;然后与接力器行程离散数据进行对比,得到接力器辨识误差数据;再根据接力器辨识误差数据分别设计控制相关参数辨识律与接力器相关参数辨识律并积分接力器参数的辨识结果;再根据公式反解出接力器放大增益参数与接力器时间常数。
7、步骤s50,建立发电机组参数辨识模型,解算发电机组辨识模型的输出数据;然后与水轮机发电机组的频率离散数据进行对比,得到发电机组辨识误差数据;再根据发电机组辨识误差数据分别设计发电机组输入相关参数辨识律与发电机组输出相关参数辨识律并积分得到发电机组参数辨识结果;再根据公式反解出发电机组放大增益参数与发电机组惯性时间常数。
8、在本发明的一种示例实施例中,设置水轮机的期望频率,然后采用计算机生成随机激励源频率,将两者进行叠加,得到水轮机的辨识期望频率;再按照统一离散周期,转换为水轮机的辨识期望频率离散数据包括:
9、fr=fr0+frr(r-0.5);
10、其中fr0为水轮机的期望频率,r为采用计算机生成的在区间[0,1]之间的随机数;frr为采用计算机生成随机激励源频率的幅值;fr为水轮机的辨识期望频率;fr(n)为水轮机的辨识期望频率离散数据。
11、在本发明的一种示例实施例中,根据水轮机的辨识期望频率离散数据与水轮机发电机组的频率离散数据进行对比,得到水轮机发电机组频率误差离散数据;再根据误差数据进行比例、积分、差分混合运算,组成水轮机pid控制包括:
12、e(n)=fr(n)-f(n);
13、
14、
15、u(n)=kpe(n)+kss(n)+kdd(n);
16、其中f(n)为水轮机发电机组的频率离散数据,e(n)为水轮机发电机组频率误差离散数据;s(n)为水轮机发电机组频率误差积分离散数据;d(n)为水轮机发电机组频率误差差分离散数据;u(n)为水轮机发电机组pid控制离散数据;kp、ks、kd为误差比例、积分、差分的控制参数。
17、在本发明的一种示例实施例中,建立接力器参数辨识模型,解算接力器辨识模型的输出数据;然后与接力器行程离散数据进行对比,得到接力器辨识误差数据;再根据接力器辨识误差数据分别设计控制相关参数辨识律与接力器相关参数辨识律并积分接力器参数的辨识结果;再根据公式反解出接力器放大增益参数与接力器时间常数包括:
18、ybn(n)=c6g(n)u(n)+c7g(n)y(n-1);
19、ej(n)=y(n)-ybn(n);
20、
21、
22、
23、
24、
25、
26、其中ybn(n)为接力器辨识模型的输出数据,ej(n)为接力器辨识误差数据;y(n)为接力器行程离散数据,c6d(n)为控制相关参数辨识律;kc6、kc6a、ε1为控制相关参数辨识速度调节系数;c7d(n)为接力器相关参数辨识律;kc7、kc7a、ε2为接力器相关参数辨识速度调节系数;c6g(n)为控制相关参数辨识数据;c7g(n)为接力器相关参数的辨识结果数据;tg(n)为接力器时间常数;ka(n)为接力器放大增益参数。
27、在本发明的一种示例实施例中,建立发电机组参数辨识模型,解算发电机组辨识模型的输出数据;然后与水轮机发电机组的频率离散数据进行对比,得到发电机组辨识误差数据;再根据发电机组辨识误差数据分别设计发电机组输入相关参数辨识律与发电机组输出相关参数辨识律并积分得到发电机组参数辨识结果;再根据公式反解出发电机组放大增益参数与发电机组惯性时间常数包括:
28、fbn(n)=c1g(n)p(n)+c2g(n)f(n-1);
29、ef(n)=f(n)-fbn(n);
30、
31、
32、
33、
34、
35、
36、其中p(n)为水轮机输出功率离散数据,fbn(n)为发电机组辨识模型的输出数据,ef(n)为发电机组辨识误差数据;c1d(n)为发电机组输入相关参数辨识律;kc1、kc1a、ε3为输入相关参数辨识速度调节系数;c2d(n)为发电机组输出相关参数辨识律;kc2、kc2a、ε4为发电机组输出相关参数辨识速度调节系数;c1g(n)为发电机组输入相关参数辨识数据;c2g(n)为发电机组输出相关参数的辨识结果数据;ts(n)为发电机组惯性时间常数;ks(n)为发电机组放大增益参数。
37、有益效果
38、本发明提供了一种采用计算机生成随机激励的水电站水轮机模型参数辨识的方法,其效果之一是可以大大降低模型不确定性带来的水电站水轮机控制品质不高的问题。其效果之二是采用模型参数辨识的方法比物理建模过程简单方便,可以大大节省时间,也具有较高的经济效益。该方法具有以下几方面的创新。第一是提出了一种采用计算机生成随机激励的方式,大大提高了传统参数辨识的精度,以及参数辨识的适用范围与广度。我们在实验中对比过,不采用随机激励时,部分参数是无法准确辨识的。而采用随机激励的方式,很好地利用了随机过程的变量性,从而利用随机过程的统计特性,能大大提高参数辨识的效果。创新点之二是提出了一种多参数相关铰链的参数辨识律设计方法,从而使得辨识过程能够快速打破非随机平衡,能够有效提高辨识速度与辨识效果。
本文地址:https://www.jishuxx.com/zhuanli/20240730/200831.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表