基于领航辅助算法的驾驶员在环实时仿真系统及方法与流程
- 国知局
- 2024-08-01 00:22:34
本发明涉及驾驶仿真领域,更具体地,涉及一种基于领航辅助算法的驾驶员在环实时仿真系统及方法。
背景技术:
1、驾驶员在环(dil)实时仿真系统,是基于实时仿真技术和视景仿真技术开发,结合车辆动力学仿真软件、复杂道路交通建模仿真工具和实时仿真计算机,为车辆技术的研究和开发提供了完整的“人-车路-环境”闭环系统,用于满足车辆新技术开发和技术演示的需求。
2、因此,有必要开发一种基于领航辅助算法(noa)的驾驶员在环实时仿真系统及方法。
3、公开于本发明背景技术部分的信息仅仅旨在加深对本发明的一般背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
技术实现思路
1、本发明提出了一种基于领航辅助算法的驾驶员在环实时仿真系统及方法,其能够实现时间同步系统,从而完成对传感器信号的实时采样和对六自由度的实时控制,消除延迟。
2、第一方面,本公开实施例提供了一种基于领航辅助算法的驾驶员在环实时仿真系统,包括上位机系统、实时仿真机柜、环幕、驾驶舱和六自由度平台,其中:
3、所述上位机系统用来运行仿真场景、车辆动力学软件、领航辅助算法,通过所述车辆动力学软件构建车辆动力学模型,通过所述领航辅助算法获得模拟控制指令;
4、所述环幕、所述驾驶舱用来展示所述仿真场景;
5、所述实时仿真机柜用来运行车辆动力学模型,根据控制指令运算车辆的姿态信息,将所述姿态信息发送给所述六自由度平台;
6、所述六自由度平台根据所述姿态信息,实现对驾驶舱的俯仰、横滚和航向姿态变化。
7、优选地,所述上位机系统用来运行仿真场景包括:
8、在vtd端搭建仿真场景,通过融合机将画面分成三个投影仪图像,通过三个投影仪将所述仿真场景投影在所述环幕对驾驶员进行展示,同时通过vtd端输出后视图像至所述驾驶舱的后视镜中。
9、优选地,所述上位机系统包括摄像头模型、毫米波雷达模型、ros仿真接口,vtd端通过所述ros仿真接口将所述摄像头模型、所述毫米波雷达模型获得的数据传输至所述领航辅助算法。
10、优选地,驾驶员能够在所述驾驶舱中发布实时控制指令。
11、优选地,所述实时仿真机柜用来运行车辆动力学模型,根据控制指令运算车辆的姿态信息包括:
12、所述实时仿真机柜运行所述车辆动力学模型,基于labview和simulink平台搭建仿真接口,将所述虚拟控制指令或所述实时控制指令转化为车辆动力学输入信号,由所述车辆动力学模型计算所述姿态信息。
13、优选地,若所述虚拟控制指令与所述实时控制指令相冲突,则执行所述实时控制指令。
14、第二方面,本公开实施例提供了一种基于领航辅助算法的驾驶员在环实时仿真方法,包括:
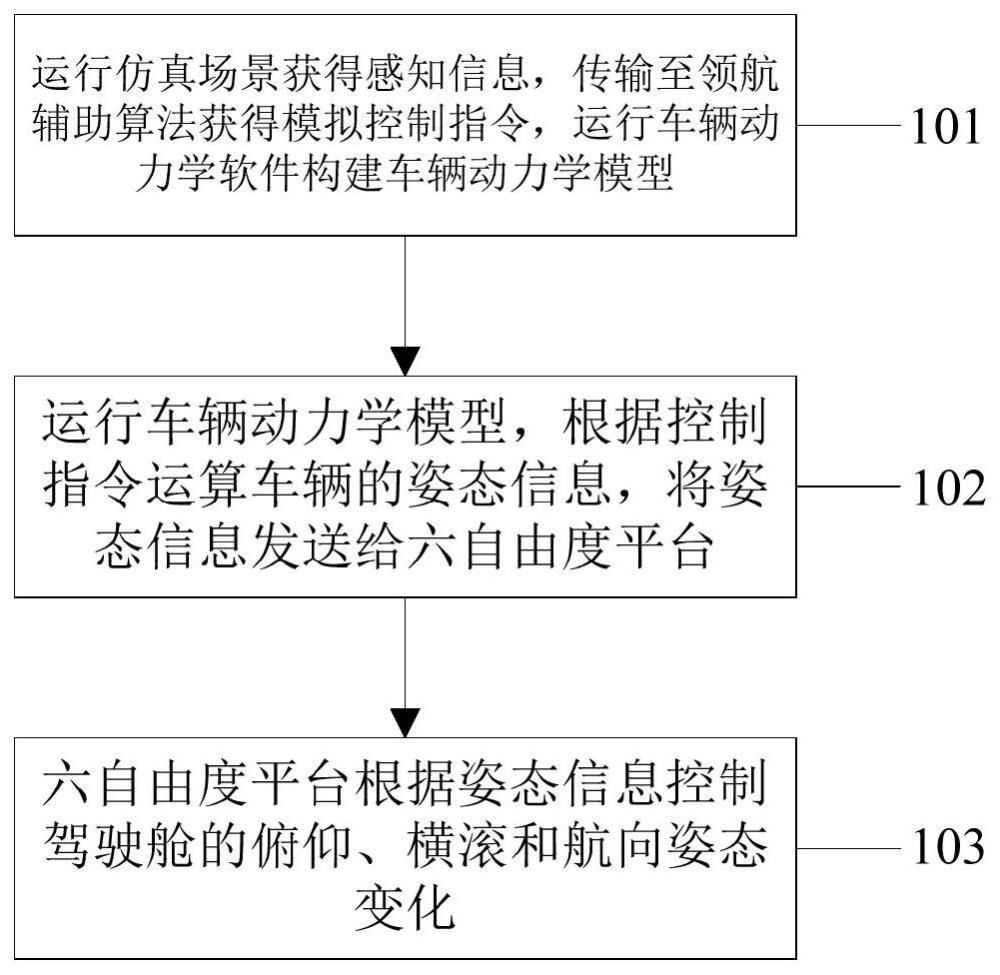
15、上位机系统通过运行仿真场景获得感知信息,传输至领航辅助算法获得模拟控制指令,并传输至环幕、驾驶舱展示,运行车辆动力学软件构建车辆动力学模型;
16、实时仿真机柜运行车辆动力学模型,根据控制指令运算车辆的姿态信息,将所述姿态信息发送给所述六自由度平台;
17、六自由度平台根据所述姿态信息控制驾驶舱的俯仰、横滚和航向姿态变化。
18、优选地,所述感知信息包括传感器信息、道路信息。
19、优选地,在vtd端搭建仿真场景,通过融合机将画面分成三个投影仪图像,通过三个投影仪将所述仿真场景投影在所述环幕对驾驶员进行展示,同时通过vtd端输出后视图像至所述驾驶舱的后视镜中。
20、优选地,驾驶员能够在所述驾驶舱中发布实时控制指令。
21、优选地,所述实时仿真机柜用来运行车辆动力学模型,根据控制指令运算车辆的姿态信息包括:
22、所述实时仿真机柜运行所述车辆动力学模型,基于labview和simulink平台搭建仿真接口,将所述虚拟控制指令或所述实时控制指令转化为车辆动力学输入信号,由所述车辆动力学模型计算所述姿态信息。
23、优选地,若所述虚拟控制指令与所述实时控制指令相冲突,则执行所述实时控制指令。
24、本发明的方法和装置具有其它的特性和优点,这些特性和优点从并入本文中的附图和随后的具体实施方式中将是显而易见的,或者将在并入本文中的附图和随后的具体实施方式中进行详细陈述,这些附图和具体实施方式共同用于解释本发明的特定原理。
技术特征:1.一种基于领航辅助算法的驾驶员在环实时仿真系统,其特征在于,包括上位机系统、实时仿真机柜、环幕、驾驶舱和六自由度平台,其中:
2.根据权利要求1所述的基于领航辅助算法的驾驶员在环实时仿真系统,其中,所述上位机系统用来运行仿真场景包括:
3.根据权利要求2所述的基于领航辅助算法的驾驶员在环实时仿真系统,其中,所述上位机系统包括摄像头模型、毫米波雷达模型、ros仿真接口,vtd端通过所述ros仿真接口将所述摄像头模型、所述毫米波雷达模型获得的数据传输至所述领航辅助算法。
4.根据权利要求1所述的基于领航辅助算法的驾驶员在环实时仿真系统,其中,驾驶员能够在所述驾驶舱中发布实时控制指令。
5.根据权利要求4所述的基于领航辅助算法的驾驶员在环实时仿真系统,其中,所述实时仿真机柜用来运行车辆动力学模型,根据控制指令运算车辆的姿态信息包括:
6.根据权利要求5所述的基于领航辅助算法的驾驶员在环实时仿真系统,其中,若所述虚拟控制指令与所述实时控制指令相冲突,则执行所述实时控制指令。
7.一种基于领航辅助算法的驾驶员在环实时仿真方法,利用所述权利要求1-6中任意一项所述的基于领航辅助算法的驾驶员在环实时仿真系统,其特征在于,包括:
8.根据权利要求7所述的基于领航辅助算法的驾驶员在环实时仿真方法,其中,驾驶员能够在所述驾驶舱中发布实时控制指令。
9.根据权利要求8所述的基于领航辅助算法的驾驶员在环实时仿真方法,其中,所述实时仿真机柜用来运行车辆动力学模型,根据控制指令运算车辆的姿态信息包括:
10.根据权利要求9所述的基于领航辅助算法的驾驶员在环实时仿真方法,其中,若所述虚拟控制指令与所述实时控制指令相冲突,则执行所述实时控制指令。
技术总结本申请公开了一种基于领航辅助算法的驾驶员在环实时仿真系统及方法。该系统可以包括上位机系统、实时仿真机柜、环幕、驾驶舱和六自由度平台,其中:上位机系统用来运行仿真场景、车辆动力学软件、领航辅助算法,通过车辆动力学软件构建车辆动力学模型,通过领航辅助算法获得模拟控制指令;环幕、驾驶舱用来展示仿真场景;实时仿真机柜用来运行车辆动力学模型,根据控制指令运算车辆的姿态信息,将姿态信息发送给六自由度平台;六自由度平台根据姿态信息,实现对驾驶舱的俯仰、横滚和航向姿态变化。本发明能够实现时间同步系统,从而完成对传感器信号的实时采样和对六自由度的实时控制,消除延迟。技术研发人员:孙加兴,王彬,张静宜,陈新,何坤,赵珈艺,王赞受保护的技术使用者:北京汽车股份有限公司技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/200827.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。