基于多传感器的无人机降落方法、装置、设备及介质与流程
- 国知局
- 2024-08-01 00:22:34
本发明涉及无人机控制,尤其涉及一种基于多传感器的无人机降落方法、装置、设备及介质。
背景技术:
1、无人机精准降落是指无人机在目标区域内以高精度、高稳定性完成降落操作。
2、当前无人机精准降落的方法主要有,利用全球定位系统(global positioningsystem,gps)引导无人机前往预定位置,然后通过地标、信标或特殊光线引导无人机精准降落。或者使用实时差分定位(real-time kinematic,rtk)确定无人机在环境中的准确位置,实现无人机精准降落。
3、现有的无人机降落方法均依靠卫星实现定位,以此引导无人机靠近地标,但在无gps的环境中,通常使用视觉或激光雷达实现定位,然而随着无人机飞行距离的增加,使用视觉或激光雷达的定位误差会逐渐增大,使得无人机降落存在稳定性弱,精确度差的问题。
技术实现思路
1、针对现有技术存在的问题,本发明提供一种基于多传感器的无人机降落方法、装置、设备及介质。
2、本发明提供一种基于多传感器的无人机降落方法,包括:
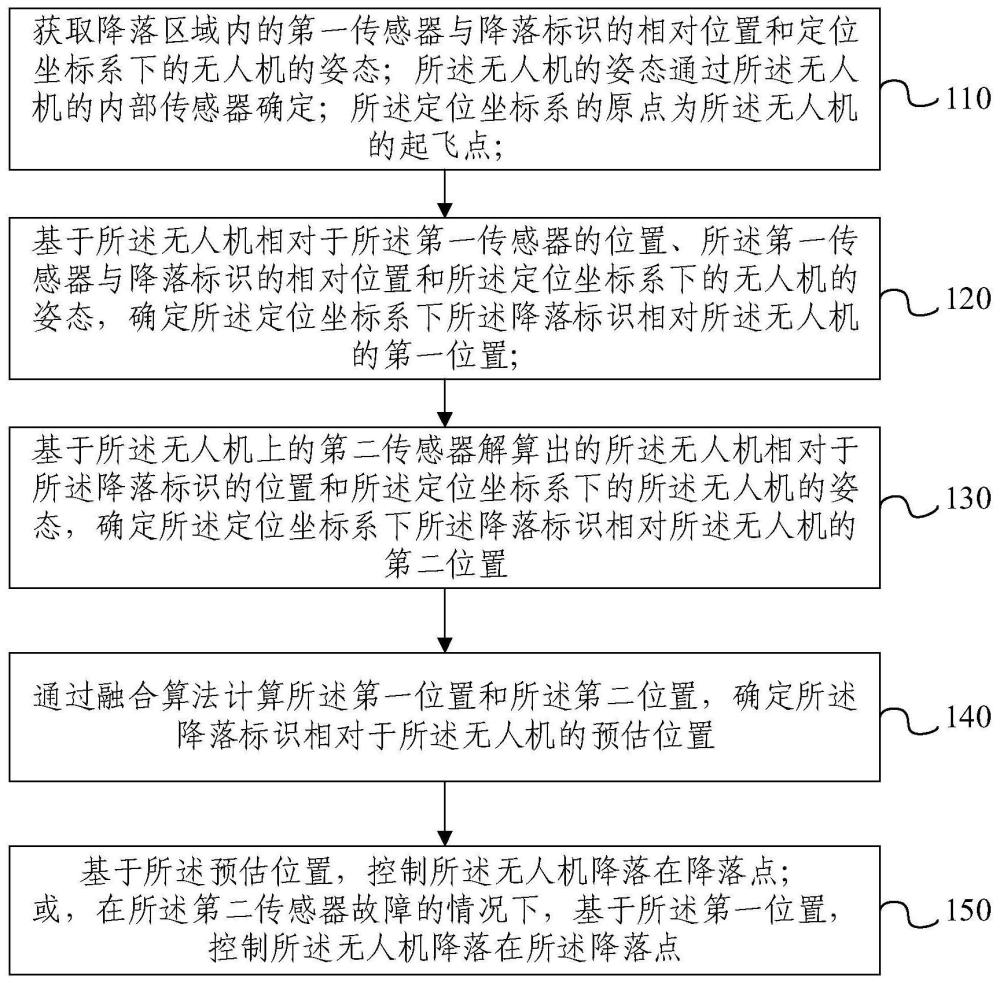
3、获取降落区域内的第一传感器与降落标识的相对位置和定位坐标系下的无人机的姿态;所述无人机的姿态通过所述无人机的内部传感器确定;所述定位坐标系的原点为所述无人机的起飞点;
4、基于所述无人机相对于所述第一传感器的位置、所述第一传感器与降落标识的相对位置和所述定位坐标系下的无人机的姿态,确定所述定位坐标系下所述降落标识相对所述无人机的第一位置;
5、基于所述无人机上的第二传感器解算出的所述无人机相对于所述降落标识的位置和所述定位坐标系下的所述无人机的姿态,确定所述定位坐标系下所述降落标识相对所述无人机的第二位置;
6、通过融合算法计算所述第一位置和所述第二位置,确定所述降落标识相对于所述无人机的预估位置;
7、基于所述预估位置,控制所述无人机降落在降落点;
8、或,在所述第二传感器故障的情况下,基于所述第一位置,控制所述无人机降落在所述降落点。
9、根据本发明提供的一种基于多传感器的无人机降落方法,所述基于所述无人机上的第二传感器解算出的所述无人机相对于所述降落标识的位置和所述定位坐标系下的所述无人机的姿态,确定所述定位坐标系下所述降落标识相对所述无人机的第二位置之前,所述方法还包括:
10、判断预设时间内所述第二传感器是否检测到降落标识;所述降落标识设置在所述降落点上;
11、在判断结果为否的情况下,基于所述第一位置控制所述无人机降落在所述降落点。
12、根据本发明提供的一种基于多传感器的无人机降落方法,所述方法还包括:
13、基于所述预估位置,创建初始位置点;所述初始位置点用于表征所述第二传感器检测到所述降落标识的位置。
14、根据本发明提供的一种基于多传感器的无人机降落方法,所述基于所述预估位置,控制所述无人机降落在降落点,包括:
15、基于所述预估位置,确定所述无人机与所述降落点的第一水平误差;
16、在所述第一水平误差小于所述第一预设误差的情况下,基于所述第一水平误差控制所述无人机以第一速度向所述降落点移动;
17、基于所述预估位置,确定所述无人机与所述降落点的第二水平误差;
18、在所述第二水平误差小于第二预设误差的情况下,控制所述无人机以第二速度垂直降落至所述降落点。
19、根据本发明提供的一种基于多传感器的无人机降落方法,所述方法还包括:
20、在所述第一水平误差大于或等于所述第一预设误差的情况下,获取所述第二传感器检测到所述降落标识的检测次数;
21、在所述检测次数小于预设阈值时,控制所述无人机返回所述初始位置点。
22、根据本发明提供的一种基于多传感器的无人机降落方法,所述降落标识包括无线电特征或视觉特征中的至少一项;所述无线电特征或所述视觉特征用于所述第二传感器检测所述降落标识。
23、本发明还提供一种基于多传感器的无人机降落装置,包括:
24、获取模块,用于获取降落区域内的第一传感器与降落标识的相对位置和定位坐标系下的无人机的姿态;所述无人机的姿态通过所述无人机的内部传感器确定;所述定位坐标系的原点为所述无人机的起飞点;
25、第一确定模块,用于基于所述无人机相对于所述第一传感器的位置、所述第一传感器与降落标识的相对位置和所述定位坐标系下的无人机的姿态,确定所述定位坐标系下所述降落标识相对所述无人机的第一位置;
26、第二确定模块,用于基于所述无人机上的第二传感器解算出的所述无人机相对于所述降落标识的位置和所述定位坐标系下的所述无人机的姿态,确定所述定位坐标系下所述降落标识相对所述无人机的第二位置;
27、融合模块,用于通过融合算法计算所述第一位置和所述第二位置,确定所述降落标识相对于所述无人机的预估位置;
28、基于所述预估位置,控制所述无人机降落在降落点;
29、或,在所述第二传感器故障的情况下,基于所述第一位置,控制所述无人机降落在所述降落点。
30、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述的基于多传感器的无人机降落方法。
31、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述的基于多传感器的无人机降落方法。
32、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述的基于多传感器的无人机降落方法。
33、本发明提供的一种基于多传感器的无人机降落方法、装置、设备及介质,首先获取降落区域内的第一传感器与降落标识的相对位置和定位坐标系下的无人机的姿态;基于无人机相对于第一传感器的位置、第一传感器与降落标识的相对位置和定位坐标系下的无人机的姿态,确定定位坐标系下降落标识相对无人机的第一位置;然后再基于无人机上的第二传感器解算出的无人机相对于降落标识的位置和定位坐标系下的无人机的姿态,确定定位坐标系下降落标识相对无人机的第二位置;通过融合算法计算第一位置和第二位置,确定降落标识相对于无人机的预估位置;基于预估位置,控制无人机降落在降落点,本发明的基于多传感器的无人机降落方法,通过在降落区域设置第一传感器,在无人机上设置第二传感器,通过融合第二传感器数据和第一传感器数据,引导无人机完成精准降落;或者,在无人机上的第二传感器出现故障的情况下,基于第一位置控制无人机降落在降落点。提高了无人机降落的稳定性和精确度。
技术特征:1.一种基于多传感器的无人机降落方法,其特征在于,包括:
2.根据权利要求1所述的基于多传感器的无人机降落方法,其特征在于,所述基于所述无人机上的第二传感器解算出的所述无人机相对于所述降落标识的位置和所述定位坐标系下的所述无人机的姿态,确定所述定位坐标系下所述降落标识相对所述无人机的第二位置之前,所述方法还包括:
3.根据权利要求2所述的基于多传感器的无人机降落方法,其特征在于,所述方法还包括:
4.根据权利要求3所述的基于多传感器的无人机降落方法,其特征在于,所述基于所述预估位置,控制所述无人机降落在所述降落点,包括:
5.根据权利要求4所述的基于多传感器的无人机降落方法,其特征在于,所述方法还包括:
6.根据权利要求1所述的基于多传感器的无人机降落方法,其特征在于,所述降落标识包括无线电特征或视觉特征中的至少一项;所述无线电特征或所述视觉特征用于所述第二传感器检测所述降落标识。
7.一种基于多传感器的无人机降落装置,其特征在于,包括:
8.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至6任一项所述的基于多传感器的无人机降落方法。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述的基于多传感器的无人机降落方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述的基于多传感器的无人机降落方法。
技术总结本发明提供一种基于多传感器的无人机降落方法、装置、设备及介质,属于无人机控制技术领域,其中方法包括:获取降落区域内的第一传感器与降落标识的相对位置和定位坐标系下的无人机的姿态;基于无人机相对于第一传感器的位置、第一传感器与降落标识的相对位置和定位坐标系下的无人机的姿态,确定定位坐标系下降落标识相对无人机的第一位置;基于第二传感器解算出的无人机相对于降落标识的位置和定位坐标系下的无人机的姿态,确定降落标识相对无人机的第二位置;计算第一位置和第二位置,确定降落标识相对于无人机的预估位置;基于预估位置,控制无人机降落在降落点;或,在第二传感器故障的情况下,基于第一位置,控制无人机降落在降落点。技术研发人员:首云锋,王凯,高海跃,王保兵,王丹丹受保护的技术使用者:北京天玛智控科技股份有限公司技术研发日:技术公布日:2024/7/29本文地址:https://www.jishuxx.com/zhuanli/20240730/200826.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
火星检测系统的制作方法
下一篇
返回列表