马达控制装置、马达控制方法与流程
- 国知局
- 2024-07-31 17:24:49
本发明涉及马达控制装置、马达控制方法。
背景技术:
1、在步进马达中,为了实现高速旋转时稳定的动作,有时通过闭环控制进行驱动的控制。另一方面,在步进马达通过闭环控制进行驱动的控制的情况下,有时会在停止旋转时发生被称为猎振(hunting)的振动动作。因此,作为步进马达的驱动的控制方法,考虑在停止旋转时从闭环控制切换至开环控制。
2、需要说明的是,在控制马达的驱动的技术中,已知的是降低开环控制与反馈控制切换时的马达旋转速度的差异(参照专利文献1)。
3、现有技术文献
4、专利文献
5、专利文献1:日本特开2018-191461号公报
技术实现思路
1、发明所要解决的问题
2、然而,在步进马达中,在将驱动的控制方法从闭环控制切换至开环控制的情况下,有时会产生驱动电流的相位的变动。步进马达有时因驱动电流的相位发生变动而产生振动。因此,在步进马达中,要求在想要在切换反馈控制与开环控制之间进行切换的情况下,抑制驱动电流的相位的变动。
3、本发明将上述的技术问题作为一个例子,其目的在于提供一种马达控制装置,能在想要在反馈控制与开环控制之间进行切换的情况下,抑制驱动电流的相位的变动。
4、用于解决问题的方案
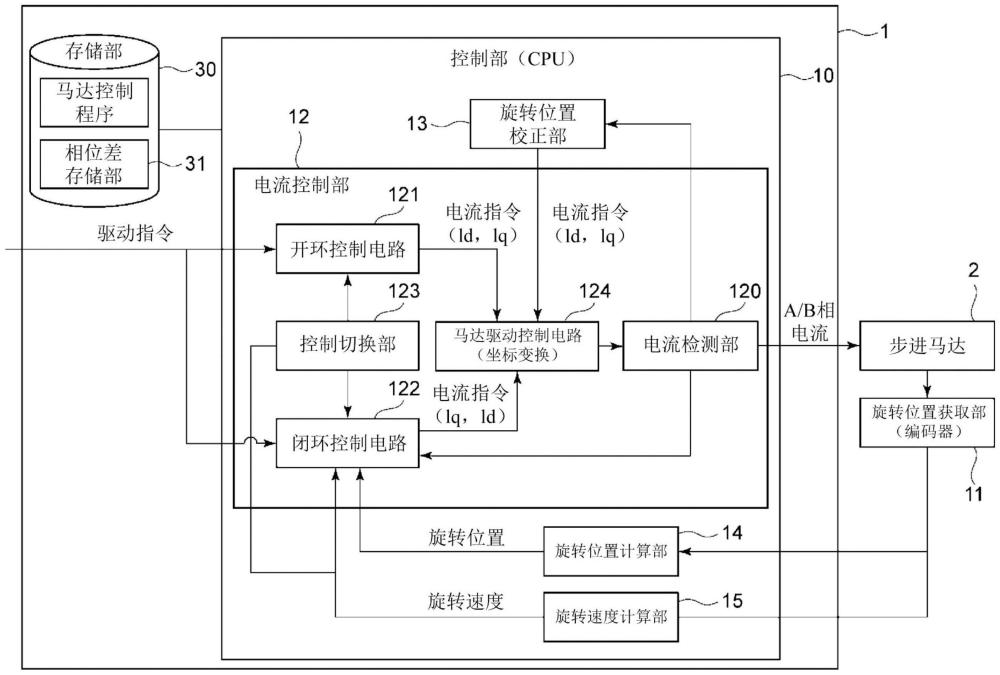
5、为了实现上述目的,本发明的马达控制装置具备:电流控制部,通过开环控制或闭环控制中的任一方来控制电流,其中,该开环控制基于电流指令值来控制对马达供给的电流,该闭环控制基于所述电流指令值和所述马达的转子的旋转位置来控制对所述马达供给的电流;和旋转位置校正部,基于第一相位差来对第二相位差进行校正,其中,该第一相位差是在所述电流控制部通过所述闭环控制对电流进行控制的状态下的所述转子的旋转位置与所述转子的目标的旋转位置之差,所述第二相位差是在所述电流控制部从所述闭环控制切换至所述开环控制时的所述闭环控制中的旋转位置与所述开环控制中的旋转位置之差。
6、根据本发明的马达控制装置,能在想要在反馈控制与开环控制之间进行切换的情况下,抑制驱动电流的相位的变动。
技术特征:1.一种马达控制装置,所述马达控制装置具备:
2.根据权利要求1所述的马达控制装置,所述马达控制装置具备:
3.根据权利要求1或2所述的马达控制装置,其中,
4.根据权利要求1至3中任一项所述的马达控制装置,其中,
5.根据权利要求1至4中任一项所述的马达控制装置,其中,
6.一种马达控制方法,由计算机执行以下步骤:
技术总结本发明在想要在反馈控制与开环控制之间进行切换的情况下,抑制驱动电流的相位的变动。马达控制装置(1)具备:电流控制部(12),通过开环控制或闭环控制中的任一方来控制电流;和旋转位置校正部(13),基于第一相位差来对第二相位差进行校正,其中,该第一相位差是在电流控制部(12)通过闭环控制来控制电流的状态下的转子的旋转位置与转子的作为目标的旋转位置之差,该第二相位差是在电流控制部(12)从闭环控制切换至开环控制时的闭环控制中的旋转位置与开环控制中的旋转位置之差。技术研发人员:荒川洋平受保护的技术使用者:美蓓亚三美株式会社技术研发日:技术公布日:2024/7/25本文地址:https://www.jishuxx.com/zhuanli/20240731/175393.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表