一种磁力可控的磁吸附单元及具有吸附力感知功能的磁吸附足
- 国知局
- 2024-07-31 19:00:46
本发明属于磁吸附机器人相关,更具体地,涉及一种磁力可控的磁吸附单元及具有吸附力感知功能的磁吸附足。
背景技术:
1、在实际工业生产中,金属罐体在石油化工、冶金、机械以及社会生活等领域有十分广泛的应用。传统的罐体清洁依靠人工操作精密探伤仪器,其成本高、效率低、工作量大,且伴随着极大的安全隐患。因此,采用爬壁机器人代替人工进行罐体作业,成为当前罐体检测清理的迫切需要。爬壁机器人除自身重量以外还需要担负一定的负载重量,这就要求机器人有足够的吸附能力,然而太强的吸附力又会导致运动灵活性的降低,这对吸附方式、吸附机构提出了更高的期望,也对行走机构有了更灵活轻便的要求。如cn115339540的组合轮式重载磁吸附爬壁机器人,磁吸附力强,组合后的导磁金属轮可以在导磁壁面上产生强大的磁闭合磁路,可在导磁壁面上全方位自由行走,并携带更重的工具在壁面上工作,但由于滚动时磁闭合磁路的磁通密度是不变的,所以磁轮组在工作时吸附力不会改变,并不适用于其他复杂环境。所以磁吸附装置为适应不同应用场景和复杂环境、加强吸附效果和稳定性,对可变磁力的需求大大增加。可变磁力可以提高磁吸附装置的灵活性和安全性。在某些应用场景中,需要快速、准确地完成吸附操作,而在一些需要避免误吸附的应用场景中,磁力可控的磁吸附装置也可以通过调整磁力大小来避免误吸附的发生,该装置可以根据需要快速调整磁力大小,提高吸附效率,保证安全性。而现有的磁吸附力调整装置多为依靠组件的升降调节磁吸组件与铁磁性壁面的气隙大小,从而控制吸附力大小,如cn 104440952 a中提出的永磁间隙吸附装置,但当机器人工作在复杂曲面环境下时,由于机器人在作业过程中位姿不断改变,现有的磁吸附力调整机构无法满足吸附力需求。
2、现有爬壁机器人多采用轮式结构,而轮式机器人难以在复杂地形上稳定行驶、越障能力较差,相比之下,足式机器人能够更好地适应复杂的地形,具有更强的越障能力,移动方式灵活。又如10.1126/scirobotics.add1017提出了一种足式磁吸附爬壁机器人,能够在铁磁环境中进行灵活和多功能的攀爬运动,但其采用的电永磁吸附装置不能对磁足和壁面的接触状态以及吸附力大小进行测量感知。所以用于足式磁吸附爬壁机器人的吸附单元在吸附力调整、感知力控方面还有待改进。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种磁力可控的磁吸附单元及具有吸附力感知功能的磁吸附足,其能够灵活性、方便地调整吸附力。
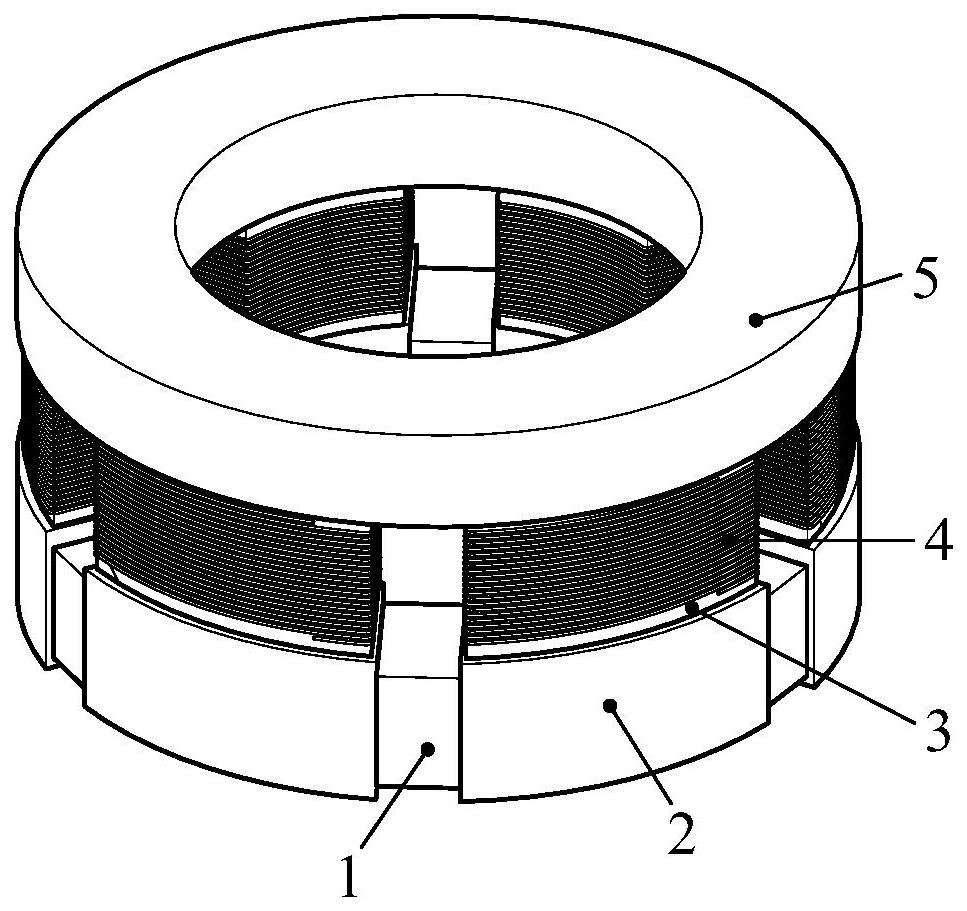
2、为实现上述目的,按照本发明的一个方面,提供了一种磁力可控的磁吸附单元,所述磁吸附单元为一个环形阵列,其包括多个钕铁硼永磁体、多个磁轭、多个铝镍钴永磁体、多个线圈及环形磁轭,多个所述钕铁硼永磁体与多个所述磁轭交替设置,并沿一个圆排布;所述铝镍钴永磁体设置在所述磁轭上,所述铝镍钴永磁体上缠绕有所述线圈;所述环形磁轭设置在所述铝镍钴永磁体上;
3、多个所述钕铁硼永磁体的n极、s极交替排列,相邻两个所述钕铁硼永磁体的相同磁极相对设置,所述铝镍钴永磁体邻近所述钕铁硼永磁体一端的磁极与其邻近的所述钕铁硼永磁体的磁极相同。
4、所述多个钕铁硼永磁体、多个磁轭、多个铝镍钴永磁体、多个线圈的个数可以为任意等于或大于4的偶数。
5、进一步地,通过控制所述线圈中通入电流的正负及大小来调整所述铝镍钴永磁体的磁场大小及方向,进而调节所述磁吸附单元所产生的吸附力。
6、本发明还提供了一种具有吸附力感知功能的磁吸附足,所述磁吸附足包括腿部连接结构、如上所述的磁吸附单元及微处理器,所述腿部连接结构连接于所述磁吸附单元的一端;
7、所述腿部连接结构内设置有三维力传感器,所述三维力传感器用于测量磁吸附单元对机器人腿部的作用力;所述微处理器用于依据来自所述三维力传感器的测量数据判断足端是否与壁面发生滑移,实现了足端与壁面接触状态的自感知。
8、进一步地,所述腿部连接结构包括固定板、固定盖、万向节、限位弹簧及连接件,所述万向节相背的两端分别连接所述连接件及所述固定盖,所述限位弹簧相背的两端分别连接所述连接件及所述固定盖;所述三维力传感器连接所述固定盖及所述固定板,所述固定板连接于所述环形磁轭。
9、进一步地,所述固定板的中部开设有第二轴向螺纹孔,所述固定板的周缘还开设有多个第一轴向螺纹孔,第一固定螺栓的一端依次穿过所述磁轭、所述铝镍钴永磁体及所述环形磁轭后与所述第一轴向螺纹孔形成螺纹连接;所述三维力传感器的中部形成有第三轴向螺纹孔,第二固定螺栓的一端穿过所述第二轴向螺纹孔后与所述第三轴向螺纹孔形成螺纹连接,使得所述三维力传感器与所述磁吸附单元相连接;第三固定螺栓的一端穿过所述固定盖后伸入所述三维力传感器,使得所述固定盖与所述三维力传感器相连接。
10、进一步地,所述固定盖的外缘均匀设置有多个第一连接环,所述连接件朝向所述万向节的一端的外缘均匀设置有多个第二连接环,多个所述限位弹簧相背的两端分别连接所述第一连接环及所述第二连接环。
11、进一步地,所述磁吸附足还包括脚垫结构,所述脚垫结构连接于所述磁吸附单元远离所述腿部连接结构的一端,其设置有柔性薄膜压力传感器,所述柔性薄膜力传感器用于壁面对足部的支持力;所述微处理器还用于依据所述作用力及所述支持力计算得到所述磁吸附单元的磁吸附力。
12、进一步地,根据所述计算得到的所述磁吸附单元的磁吸附力,可以通过控制所述线圈中通入电流的正负及大小来进一步调整所述铝镍钴永磁体的磁场大小及方向,进而实现所述磁吸附单元的吸附力的反馈调节。
13、进一步地,所述脚垫结构还包括底板及橡胶垫,所述橡胶垫、所述柔性薄膜压力传感器及所述底板依次相连接,且所述底板嵌设在所述磁吸附单元内。
14、进一步地,所述底板沿径向设置有交替且间隔的大齿及小齿,所述大齿嵌设在所述钕铁硼永磁体与所述磁轭所产生的间隙内,所述小齿设置在所述磁轭远离所述腿部连接件的一端所形成的槽口内;所述脚垫结构通过所述橡胶垫与壁面接触。
15、进一步地,所述橡胶垫的材质为天然橡胶或聚氨酯。
16、总体而言,通过本发明所构思的以上技术方案与现有技术相比,本发明提供的磁力可控的磁吸附单元及具有吸附力感知功能的磁吸附足主要具有以下有益效果:
17、1.所述磁吸附单元为一个环形阵列,可以通过控制通入绕组中电流的正负和大小来灵活连续调整磁吸附力的大小、吸附与解吸附,且增大了吸附力的密度,满足了机器人在不同工况下的吸附需求。
18、2.所述腿部连接结构与磁力可调的所述磁吸附单元相连接,所述腿部连接结构内设置有三维力传感器,所述三维力传感器能够测量足端受到的作用力,即测量足端受到的摩擦力,继而通过测量到的所述摩擦力来判断爬壁机器人的足端是否与壁面发生滑移,进而适应性的调整磁吸附单元的吸附力的大小,如此实现了爬壁机器人的足端与壁面接触状态的自感知。
19、3.所述磁吸附单元远离所述腿部连接结构的一端连接有脚垫结构,所述脚垫结构设置有柔性薄膜压力传感器,所述柔性薄膜压力传感器用于测量壁面对足端的支持力,继而基于腿部连接结构受到的作用力及所述支持力能够计算得到磁吸附单元的吸附力大小,实现了吸附力大小的监测。
20、4.所述脚垫结构设置有橡胶垫,所述爬壁机器人通过所述橡胶垫与壁面接触,具有防滑、减震、缓冲的功能,能够减小气隙,保持较大的吸附力。
本文地址:https://www.jishuxx.com/zhuanli/20240731/181339.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表