线缆连接装置和用于线缆连接装置的操纵器的制作方法
- 国知局
- 2024-07-31 19:05:04
本发明涉及一种线缆连接装置和用于这种线缆连接装置的操纵器。该线缆连接装置包括触头载体、汇流排、用于将电导体固定在汇流排和接触臂之间的接触臂以及与接触臂相互作用的操纵器。
背景技术:
1、需要这样的线缆连接装置和操纵器,以便以尽可能少的手动工作以导电方式将电导体连接到汇流排,并且机械地固定它以防止其被不期望地拉出,而且还能够在必要时将电导体以很少的手动工作从汇流排松开。
2、从de 10 2007 050 683 b4已知一种线缆连接装置,其中可以集成各种类型的操纵推动器,这些操纵推动器可以固定在至少一个操纵的解锁位置。为此目的,该出版物中提出了一种可以被拉动抵靠操纵推动器的锁定元件的实施例。在另外的实施例中,提出在引导通道中引导操纵推动器,其中引导通道中的隔间提供自由空间,使得操纵推动器的一个部分能够移位,以便将操纵推动器固定在解锁位置中。该变型规定,操纵推动器在可固定在隔间中的部分和与弹力夹紧触头相互作用的部分之间具有柔性部分。该柔性部分允许操纵推动器单侧枢转到引导通道中的隔间中。在该变型中,用户在锁定操作期间必须用工具执行两次平移运动,即操纵和在已插入状态下垂直于操纵方向的锁定运动,这需要一定的技能和理解相应的力学。由于操纵器仅卡锁在通道的一侧,因此卡锁的方向至少对于用户来说不是不言自明的,因为用户在操纵时无法看到触头载体的内部。这种设计的另一个关键缺点是,在操纵过程中承受很高的机械应力的操纵器的中间部分必须同时具有高稳定性和必要的弹性。特别是当锁定时,该弯曲区域由于弹簧力而受到高机械应力和相应的磨损。操纵器的用于其在壳体中的引导的部分也不可避免地设计地非常短,这使引导变得困难。
3、德国专利商标局在本技术的优先权申请中检索了以下现有技术:de 10 2007050683b4、de 10 2018 102 706 a1、de 10 2020 122 135 a1、de 10 2021 101 505a1、de 29920 231u1和cn 102 969 592a。
技术实现思路
1、本发明的目的是,改进线缆连接装置的结构和操作以及用于线缆连接装置的操纵器。
2、所述目的由独立权利要求1的主题实现。有利实施例在从属权利要求和以下描述中详细说明。
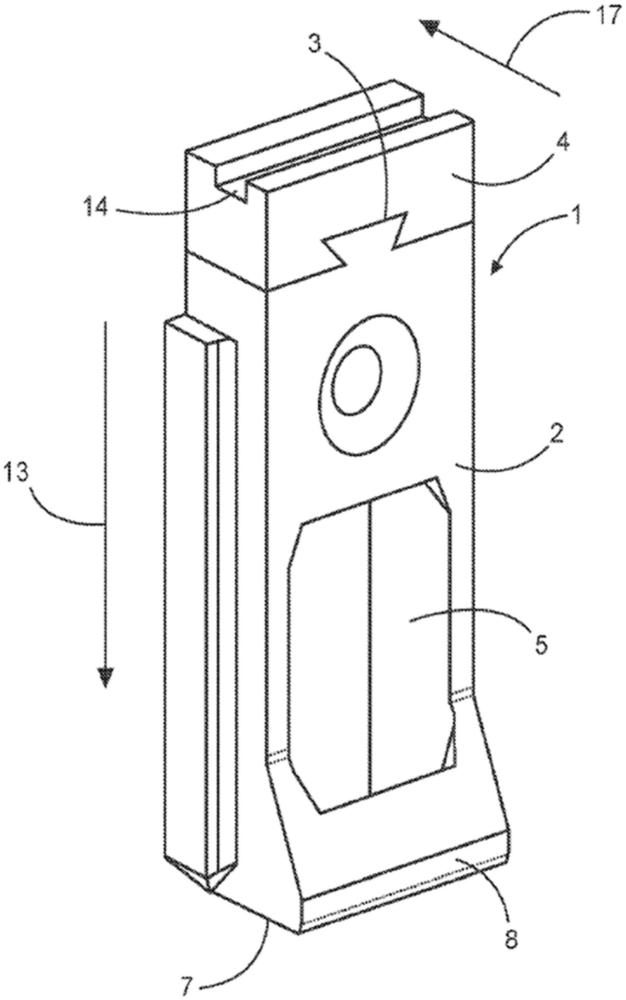
3、线缆连接装置首先具有带有汇流排的触头载体。此外,提供接触臂用于将电导体固定在汇流排上。电导体被固定地夹紧在汇流排和接触臂之间。接触臂用作夹紧臂或夹紧腿。这里选择的术语接触臂旨在表示电导体必须承受接触臂的夹紧力,以便建立导体与汇流排的持久的电接触和机械接触。与接触臂相互作用的操纵器用于操纵接触臂。为此,操纵器在释放位置和操纵位置之间可移动地支撑在触头载体中的引导通道中。根据本发明,操纵器被分为基体和锁定体两部分,使得在操纵器的操纵位置,锁定体能够相对于基体沿与操纵方向不同的锁定方向移动到引导通道的内壁中的凹部中以形成将操纵器锁定在操纵位置中的底切。
4、基本上,线缆连接装置用于通过接触臂将电导体(例如插入触头载体中的线缆的绞合线)压靠在汇流排上,并且因此以导电方式将其连接至汇流排并且同时将其机械地保持在汇流排上。在此在所谓的“推入”技术中,通常足以简单地将电导体插入到触头载体上的线缆插入口中,使得电导体在接触臂、优选v形夹紧弹簧的优选夹紧腿和汇流排的接触部分之间滑动,并夹紧在接触臂和汇流排的接触部分之间,防止其逆着插入方向被拉出。这种“推入式”连接技术特别用户友好,因为它只需要很少的手动工作,并且用户可以用两只手轻松执行。然后,操纵器仅在必要时通过按下接触臂来释放连接。
5、然而,这个方法需要足够刚性和稳定的电导体。绞合线中的单根电线必须数量众多且足够坚硬,或者绞合线必须配备有线末端套管。然而,如果在没有线末端套管的情况下插入横截面例如小于1.5mm的刚性较小的绞合线,则可能无法将接触臂移离汇流排的接触部分,特别是使其弯曲离开。在这种情况下,操纵器具有第二功能,其中,在其操纵位置,操纵器将接触臂移动远离汇流排的接触部分,使得该细绞合线完全可以插入。如果现在再次释放操纵器,则该细绞合线也可以通过接触臂夹紧在汇流排的接触部分上并导电连接并固定以防止意外拉出。
6、然而,用两只手来完成此操作非常不舒服,因为必须保持触头载体和线缆并且必须同时操作操纵器。然而,利用本发明,操纵器可以首先沿操纵方向移动到其操纵位置,以便插入细绞合线,从而将接触臂移动远离汇流排的接触部分。通过将锁定体沿与操纵方向不同的锁定方向相对于基体移动到引导通道的内壁的凹部中,锁定体接合到该凹部后方并将操纵器锁定在其操纵位置。由于这种锁定,现在可以用一只手保持住触头载体,并且可以用另一只手插入绞合线或线缆端部。在绞合线或线缆端部的该插入位置,可以用一只手轻松地保持住触头载体和插入的线缆,并且可以再次解锁锁定体,使得操纵器释放接触臂并且触头自动闭合,这就是与前述问题相比,显着改进提高了操作舒适性。
7、例如,惯用右手的人可以执行如下操作:
8、-首先用右手使用螺丝刀操作操纵器,然后
9、-还是右手使用螺丝刀锁定操纵器;这意味着右手又被解放了;
10、-然后用右手拿起线缆插入汇流排;
11、-然后,在插入状态下,将线缆从右手递到左手,并用左手握紧(也固定触头载体);
12、-右手现在可以再次拿起螺丝刀;
13、-右手现在可以解锁操纵器。
14、可以用左手在此将触头载体保持在无名指和鱼际之间。这意味着用户只能将线缆保持在食指和拇指之间,而不能将其拿起和插入。在该示例中,右手因此有利地依次执行所有动作,这使得在此过程中的控制和精神集中更加容易。
15、此外,应当注意的是,根据本发明的线缆连接还可以具有多个汇流排以及相应的多个接触臂和多个操纵器。基本上,本发明区分锁定体的两种变型,即,一方面可以相对于基体移位的锁定体,另一方面可以相对于基体旋转的锁定体。
16、对于可移位的锁定体使用纵向引导件有利于锁定体相对于基体的简单且容易且因此用户友好的相对移位。燕尾引导件还确保锁定体和基体之间的机械稳定连接。
17、在第二实施例中,锁定体可以优选地通过旋转工具、特别是狭槽螺丝头螺丝刀而在触头载体上被卡锁在其操纵位置。一方面,这是显而易见的。另一方面,旋转运动在操纵方向上没有运动分量,使得锁定运动和操纵运动彼此严格独立。为此,锁定体和基体通过旋转接头彼此连接。
18、在一个可能的实施例中,引导件可被构造成,使得基体和锁定体最初彼此牢固地连接,并且仅在阻力消除之后才能相对于彼此移动,特别是相对于彼此移位或旋转。对于带有旋转接头的实施例来说,这同样是可能的。例如,可以在基体和锁定体之间设置预定断裂点。该操纵器还可用于不需要锁定滑块(sperrschieber)的线缆连接装置,例如具有形状稳定的线缆端部的“推入式”连接部。同时,防止了基体和锁定体之间的不期望的分离,该分离例如会增加线缆连接装置的组装消耗。
19、此外,本发明适合于使用“ima-模内组装”工艺来生产操纵器。在此基体和锁定体使用不同的塑料,它们在冷却时收缩不同,因此它们不会焊接在一起。这在基体和锁定体之间产生一定量的间隙,使得它们能够相对于彼此移动。
20、工具作用部(werkzeugangriff),例如用于螺丝刀的狭槽,有利地形成到锁定体的背离基体的端部中。首先可以用螺丝刀沿操纵方向垂直向下按压操纵器,然后可以通过水平侧向位移将锁定体移动到引导通道的内壁中的凹部中。在带有旋转接头的实施例中,可以使用螺丝刀相对于基体旋转锁定体。
21、这种设计方案可以增加操作的便利性,因为与开头提到的现有技术相比,在旋转与平移完全解耦之后使用两个独立的运动来操纵或锁定。
本文地址:https://www.jishuxx.com/zhuanli/20240731/181589.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表