面向通勤需求的城市路网动态交通分区方法及系统
- 国知局
- 2024-07-31 20:26:09
本发明涉及交通管理领域,具体为一种面向通勤需求的城市路网动态交通分区方法及系统。
背景技术:
1、交通区域划分的主要目的在于优化交通流动和提升交通系统的整体效率。然而,现行的交通区域划分方法主要以道路为边界,划分包含建筑群的区域,这种基于建筑群的划分在实际的交通管理中并未显现出明确的实用价值。在城市交通管理和控制方面,主要是在城市路网上通过交通信号灯来调节各个路段的交通流量,城市小区内部的建筑群或者路段并不属于交通管理的范围。因此,以建筑群为基础的交通分区方法在这一背景下呈现出大量冗余信息,这并不利于精细化的交通流控制。
2、此外,目前的交通区域划分方法具有普适性,即不考虑不同时段的交通变化,以及不同出行目的交通需求。这种全面性的划分忽略了城市交通流在不同时间段和不同需求下的独特特性,从而在一定程度上影响了交通系统对峰时交通压力的有效响应和管理。因此,面向特定交通需求(如通勤)和特殊时段(如高峰时段)交通流变化的动态区域划分方法,成为了当前城市交通规划与管理中亟需解决的问题。
技术实现思路
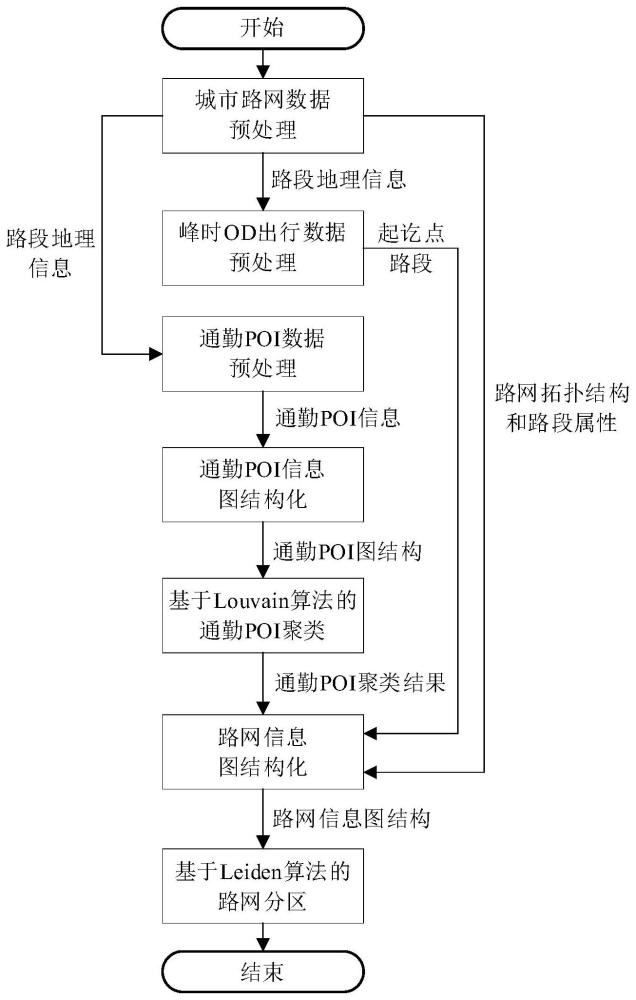
1、为解决现有的上述技术问题,本发明提供面向通勤需求的城市路网动态交通分区方法。本发明的面向通勤需求的城市路网动态交通分区方法,所述方法包括如下步骤:
2、s1、准备数据并对其预处理;
3、s2、基于社区探测算法对通勤poi聚类;
4、s3、基于社区探测算法对城市路网动态交通分区。
5、进一步地,s1具体包括如下步骤:
6、步骤1-1:路网数据准备和预处理
7、从城市地图中获取路网数据,即路段集合r=(r0,r1,…,rm);
8、其中,第m个路段包含的属性为表示第m个路段的唯一标识;表示第m个路段的地理位置信息,具体为polygon类型((x0,y0),(x1,y1),…,(xj,yj))((xj,yj)表示路段边界的第j个顶点坐标);表示第m个路段的最高限速值;表示第m个路段包含的车道数量;表示第m个路段的长度;表示第m个路段的起始路口唯一标识;表示第m个路段的结束路口唯一标识;
9、步骤1-2:高峰时段od出行数据预处理
10、筛选od出行记录:获取od出行记录,该记录集合表示为t={t0,t1,…,tl},l为记录的标号;每条记录tl筛选出以下属性值其中,和分别表示第l条出行记录的开始和结束的日期和时间,和分别表示第l条出行记录的开始和结束的地理坐标信息和表示第l条出行记录的行程距离;然后,使用公式过清洗掉无效记录,借助和城市的高峰时段信息筛选出峰时od出行记录;
11、匹配od出行记录的起讫点路段;借助以及步骤1-1得到的路段的地理数据使用点到多边形最短欧式距离公式,得到每条od出行记录起点的最近路段的标识同借助以及路段的地理数据得到每条od出行记录终点的最近路段的标识更新每条记录tl的属性值为
12、步骤1-3:通勤poi数据准备和预处理
13、首先从城市的所有poi中筛选出通勤相关的poi;然后从poi的所有数据内容中筛选出后续步骤需要的数据内容;最后计算poi聚类所需的数据和矩阵。
14、进一步地,步骤1-3,具体包括如下步骤:
15、步骤1-3-1:通勤poi的筛选和属性提取
16、筛选通勤poi:在地图上得到当前城市区域所有poi的数据;
17、确定通勤poi基本属性:通过上述步骤的过滤,得到通勤poi集合p={p0,p1,…,pi},其中,第i个通勤poi包含的属性为表示第i个poi的唯一标识,表示第i个poi的经纬度信息(xi,yi),表示第i个poi的类型;
18、完善通勤poi属性:借助每个poi的地理数据以及步骤1-1得到的路段的地理数据使用点到多边形最短欧式距离公式,得到每个poi的最近路段的标识得到进一步完善的poi属性
19、进一步地,步骤1-3,具体还包括如下步骤:
20、步骤1-3-2:通勤poi的欧式距离矩阵的计算
21、借助步骤1-3-1得到的每个通勤poi的地理坐标并使用欧式距离公式计算第i和第j个通勤poi之间的距离
22、
23、然后,将两两通勤poi之间的欧式距离转换成二维欧式距离矩阵deucliden:
24、
25、进一步地,步骤1-3,具体还包括如下步骤:
26、步骤1-3-3:通勤poi路径距离矩阵和路径路段数量矩阵的计算
27、计算通勤poi之间的最短路径:借助步骤1-3-1得到的每个通勤poi最近路段标号并使用dijkstra最短路径搜索算法获取第i到第j个通勤poi之间的最短路径
28、计算通勤poi之间的路径距离矩阵:借助路段的长度属性使用下列公式计算第i个到第j个通勤poi之间的路径pathij的长度
29、
30、其中,表示路径pathij中第k个poi最近的路段长度,表示路径中第k到k+1个路段之间衔接路口的弧线长度。随后,将两两通勤poi之间的路径距离转换成二维路径矩阵dpath:
31、
32、计算通勤poi之间的路径中路段数量矩阵:统计路径dpathij中路段的个数,得到第i个和第j个通勤poi之间的路径路段数量nij:
33、
34、将两两通勤poi之间路径中路段数量转换成二维路径路段数量矩阵n:
35、
36、进一步地,s2具体包括如下步骤:
37、步骤2-1:通勤poi信息的图结构化
38、在对通勤poi应用社区探测算法聚类之前,需要先将相关信息用图结构表示;该表示过程首先是建立基础的图结构,然后将步骤1-3-2和1-3-3中处理好的通勤poi信息添加到边的权重中;
39、步骤2-3:基于社区探测louvain算法的通勤poi聚类
40、对步骤2-1得到的图结构gpoi=(vpoi,epoi),使用社区探测louvain算法对通勤poi进行聚类。该算法的核心是通过不断移动每个poi节点的至不同社区来优化社区结构,达到图结构的模块化qpoi最大化的目标。其中,图结构的模块化qpoi的计算公式如下:
41、
42、其中,表示图gpoi中所有边的复合权重和,是步骤2-1-2计算得到的第i个和第j个poi节点之间的复合权重,rpoi是聚类分辨率参数,ki和kj分别表示第i个和第j个poi节点关联的所有边的权重之和,ci和cj分别表示第i个和第j个poi节点被分配的社区,δ(ci,cj)是一个指示函数,ci=cj时该函数值为1,否则为0;
43、当图gpoi的模块化qpoi最大化后,即完成了通勤poi的分区,得到每个poi的聚类标签分区结果示意图如图3所示。将该结果更新到步骤1-3-1的poi属性集合中,得到第i个通勤poi的属性集合
44、进一步地,步骤2-1具体包括如下步骤:
45、步骤2-1-1:基础图结构的构建
46、以每个通勤poi为图结构的节点,以poi的唯一标识为节点属性,在不同通勤poi之间均建立一条连接的边,构建通勤poi的基础图结构gpoi=(vpoi,epoi)。其中,vpoi表示节点,epoi表示边;
47、步骤2-1-2:边的复合权重计算
48、定义边的复合权重:步骤2-1-1得到的边epoi中,第i个和第j个通勤poi之间边具有复合权重具体涉及:两poi之间欧式距离子权重两poi之间相同最近路段子权重两poi之间路径中路段数量限制子权重两poi之间最近k路径距离最近节点集合之间的jaccard相似度子权重
49、计算边的复合权重:第i个和第j个通勤poi节点之间边的复合权重的计算公式如下:
50、
51、其中,(αeucliden,αsame,αn,αj)分别为四个子权重的系数。为了体现不同子权重的重要性的排序为则将四个子权重系数的值设置为(αeucliden,αsame,αn,αj)=(0.4,0.3,0.2,0.1);
52、计算边的子权重:第i个和第j个通勤poi节点之间边的欧式距离子权重的计算公式如下:
53、
54、相同最近路段子权重的计算公式如下:
55、
56、路径中路段数量限制子权重的计算公式如下:
57、
58、最近k路径距离最近节点集合之间的jaccard相似度子权重的计算公式如下:
59、
60、其中,ni和nj分别表示第i个和第j个通勤poi的k个路径距离最近的poi集合。
61、进一步地,s3具体包括如下步骤:
62、步骤3-1:路网信息的图结构化
63、先将高峰时段的历史od出行数据、路网数据和通勤poi聚类结果用图结构表示;该表示过程首先是建立基础的图结构,将高峰时段历史的od出行数据的起点和终点频次体现在节点的权重中;然后,将路段之间的属性差异,以及通勤poi聚类结果和poi与路段之间的关联关系,体现在图结构边的复合权重中;
64、步骤3-2:基于社区探测leiden算法的路网分区
65、对步骤3-1得到的图结构gedge=(vedge,eedge),使用更强调连接关系的社区探测leiden算法对路网进行分区;通过不断移动每个路段节点的至不同社区来优化社区结构,达到图结构的模块化qedge最大化的目标;其中,图结构的模块化qedge的计算公式如下:
66、
67、其中,是步骤3-1-2计算的第m个和第n个路段节点之间边的复合权重系数,redge是分区的分辨率参数,km和kn分别表示第m个和第n个路段节点关联的所有边的权重之和,cm和cn分别表示第m个和第n个路段节点被分配的社区,δ(cm,cn)是一个指示函数;
68、当图gedge的模块化qedge最大化后,即完成了路网的分区,得到每个路段的分区标签将该结果更新到步骤1-1的路段属性集合中,得到第m个路段的属性集合最终实现路网动态交通分区。
69、进一步地,步骤3-1具体包括如下步骤:
70、步骤3-1-1:基础图的确定
71、确定节点vedge信息:借助步骤1-1得到的路段集合r=(r0,r1,…,rm),以每个路段为图的节点,路段的唯一标识为节点属性,节点的权重为每个路段作为高峰时段历史od出行记录中起讫点路段的归一化频次fm,其计算公式为:
72、
73、其中,cm为第m路段作为高峰时段历史od出行记录中起讫点路段的总频次,max{c0,c1,…,cm}表示所有路段作为上述起讫点路段总频次的最大值;
74、确定边eedge信息:借助步骤1-1得到的m路段的起始路口标识和结束路口标识确定各路段之间链接关系;若路段m和路段n之间存在链接关系,则两路段之间建立一条边,且赋予该边基础子权重其计算公式如下:
75、
76、步骤3-1-2:图中边的复合权重计算
77、定义边的复合权重:步骤3-1-1得到的边eedge中,第m个和第n个路段之间边具有复合权重具体涉及:基础子权重相同聚类结果的poi最近邻路段子权重限速相同的路段子权重包含相同车道数量的路段子权重两路段长度相似的子权重
78、计算边的复合权重:第m个和第n个路段节点之间边的复合权重的计算公式如下:
79、
80、其中,(βb,βp,βs,βlane,βlength)分别为五个子权重的系数。为了体现不同子权重的重要性的排序为则将五个子权重系数的值设置为(βb,βp,βs,βlane,βlength)=(0.01,0.699,0.1,0.1,0.1);
81、计算边的子权重:相同聚类结果的poi最近邻路段子权重计算方法是,如果两个路段关联的poi中存在相同聚类结果,则否则为0;限速相同的路段子权重计算公式如下:
82、
83、包含相同车道数量的路段子权重的计算公式如下:
84、
85、两路段长度相似的子权重计算公式如下:
86、
87、本发明还涉及一种面向通勤需求的城市路网动态交通分区系统,包括一计算机模块,该模块应用上述面向通勤需求的城市路网动态交通分区方法。
88、有益效果
89、本发明与现有技术相比,具有以下优势:
90、1.简化交通分区内容
91、本发明仅在交通管理的路网上进行交通分区划分,有效地简化了交通分区的内容。这种简化使得交通分区更加集中于城市交通管理的核心部分,即城市路网,从而提高了交通分区的效率和实用性。
92、本发明通过专注于路网,本发明避免了传统方法中以建筑群为基础的分区带来的信息冗余,从而使交通管理更加精确和高效。
93、2.通勤需求的精准交通分区
94、本发明首次将两次社区探测算法的应用结合在一起,通过通勤相关poi的聚类结果影响路网的分区,实现了针对通勤特殊出行需求的交通分区。
95、本发明确保交通分区在处理通勤流量时更具针对性,有效应对城市中的通勤压力,特别是在高峰时段。
96、3.动态出行数据的有效利用
97、本发明通过分析历史od出行数据中的起点和终点地理位置信息以及关联的路段信息,实现了交通分区中动态出行数据的规律性体现。
98、本发明的方法保证了分区结果在实际交通管理中的有效性和实用性,特别是在动态交通管理和响应城市交通需求变化方面的应用。
99、总体而言,本发明在交通分区方法上的创新,不仅简化了分区内容,而且通过精准地针对通勤需求和有效利用历史od数据,显著提升了交通分区在城市交通管理中的实用性和效率。这些有益效果使得本发明在现有技术基础上具有显著的创新和进步,为城市交通规划和管理提供了新的视角和方法。
本文地址:https://www.jishuxx.com/zhuanli/20240731/186196.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。