一种基于目标跟踪的车辆逆行检测方法及系统与流程
- 国知局
- 2024-07-31 21:07:20
本发明涉及目标检测,具体是一种基于目标跟踪的车辆逆行检测方法及系统。
背景技术:
1、随着路网的不断发展和完善,人民的出行更加的便利快捷,由于生产技术的发展,民用车的成本在不断下降,自驾出行成为越来越多人选择的出行方式。交通参与者的急剧增加的同时,交通事故也在不断发生。在这些交通事故的出现原因中,车辆逆行造成事故的可能性遥遥领先;特别是在高速公路上,由于车速过快,车辆逆行造成的事故占比更高,危害更大。有些驾驶员抱着侥幸心理为了更快速到达目的地而逆行,有些驾驶员不知道道路的正确行驶方向而逆行。
2、目前,为了实时了解监控道路情况,交管部分在城市主要干道、高速公路、国省干道等重要位置都安装了路侧摄像头,由于视频数量繁多,单靠人工来达到及时监控车辆逆行和告警的方法显然不现实,并且由于视觉疲劳,以及车辆逆行的发生在单个相机中存在的时间较短等原因,人工监控及时发现的概率也很低。
3、目前也有使用车辆检测的方式检测车辆逆行,然而由于没有车道信息,该方法获得正确的车道行驶方向不准确,没有车辆跟踪算法,只通过车辆检测来判断车辆行驶方向也很容易出现误判(例如,视频中有多辆车辆时,车辆的行驶方向判断容易出错)。
4、因此本发明结合车道线检测技术,目标检测跟踪技术,发明一种基于目标跟踪的车辆逆行自动检测方法及系统。利用路侧相机视频实时检测发现车道逆行,利用喇叭播放或led显示及时告警驾驶员和后方车辆;将数据存入相关库表,供交管人员复查取证。
技术实现思路
1、针对上述存在的问题,本发明提出一种基于目标跟踪的车辆逆行检测方法及系统。
2、为实现上述目的,本发明提供如下技术方案:
3、一种基于目标跟踪的车辆逆行检测方法,所述方法包括以下步骤:
4、初始化车道行驶方向阶段;
5、车辆逆行检测阶段;
6、其中,所述初始化车道行驶方向阶段包括:
7、s101、获取路侧摄像头的视频图像;
8、s102、采用车道线检测算法对所述视频图像进行车道线检测,获取车道线信息f(x),车道信息ln,初始化车道的行驶方向标识dn=0;
9、s103、利用车辆检测模型和跟踪模型,进行车辆检测和跟踪,得到每辆车在连续图像帧中的轨迹[(w1,h1),(w2,h2),(w3,h3),···,(wn,hn)];
10、s104、根据车辆轨迹计算当前帧中每辆车的行驶方向ci,判断车辆所属车道,更新车道的行驶方向标识dn;
11、s105、监控所有车道的行驶方向标识,直到所有车道的行驶方向标识abs(dn)>t时,初始化车道行驶方向阶段结束;
12、所述车辆逆行检测阶段包括:
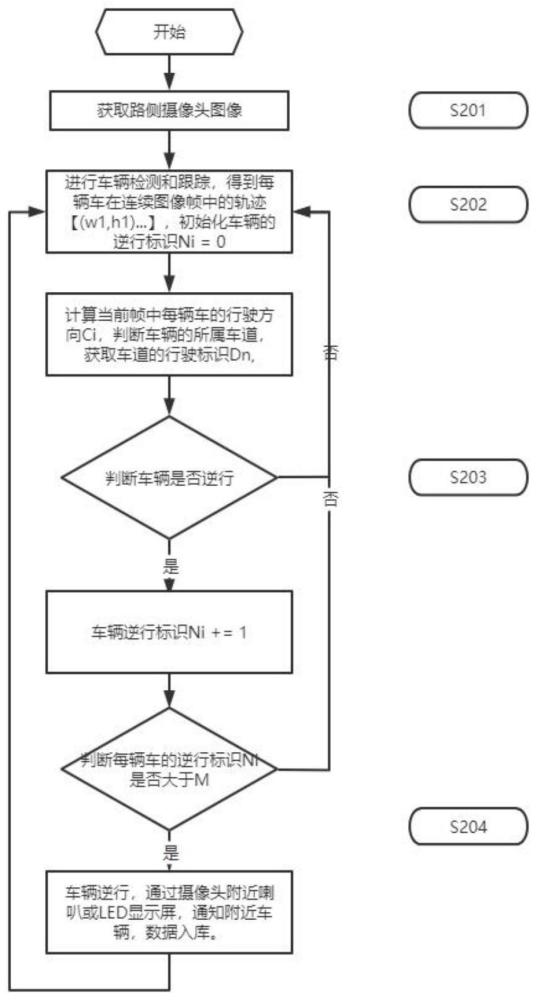
13、s201、获取路侧摄像头的视频图像;
14、s202、利用车辆检测模型和跟踪模型,进行车辆检测和跟踪,得到每辆车在连续图像帧中的轨迹[(w1,h1),(w2,h2),(w3,h3),···,(wn,hn)],并初始化车辆的逆行标识ni=0;
15、s203、根据车辆轨迹计算当前帧中每辆车的行驶方向ci,判断车辆所属车道,更新车道的行驶方向标识dn,并判断车辆是否逆行,如果逆行,则逆行标识为ni+=1;
16、s204、查看图像中每车辆的逆行标识位ni,如果ni>m,判定该车辆逆行,控制摄像头周围的喇叭/led显示屏播报警示信息;将数据保存并报警。
17、作为本发明进一步的技术方案,在步骤s102中,车道线一般使用三次曲线表示,其中,第n条车道线表示为:
18、fn(x)=ax3+bx2+cx+d
19、根据车道线信息,计算出所述图像的车道信息,车道数量等于车道线数减1,车道信息使用如下数据结构表示;
20、
21、其中,所述车道线包括车道的车道线本体、中央隔离带和路沿,所述车道信息包含左侧车道线、右侧车道线和车道行驶方向标识。
22、作为本发明进一步的技术方案,在步骤s104中,根据车辆轨迹计算当前帧中每辆车的行驶方向ci,判断车辆所属车道,更新车道的行驶方向标识dn;其中,第i时刻每辆车的行驶方向ci的计算公式如下所示:
23、ci=h(i+1)-h(i)/abs(h(i+1)-h(i))
24、ci为i时刻的该车辆行驶方向;取值为1和-1中的一种;
25、计算第i时刻辆车所属车道的步骤如下:
26、1)将i时刻的车辆位置(wi,hi)带入所有车道线的曲线表达f(x),得到集合wl
27、[f1(hi),f2(hi),···,fn(hi)]
28、2)将wi和wl中的值逐个比较,当fn(h1)<w1<fn+1(h1)时:得到车辆第i时刻的所属车道ln;
29、3)更新车道ln的车道行驶方向标识dn+=ci
30、对应当前帧中的每辆车重复步骤s104,然后获取下一帧重复步骤s103和s104。
31、作为本发明进一步的技术方案,在步骤s105中,当车道的行驶方向标识dn>0,则该车道行驶方向在图像中由远及近,如果dn<0,则该车道的行驶方向为由近及远。
32、作为本发明进一步的技术方案,在步骤s203中,判断车辆是否逆行的公式如下:
33、dn*ci>0,车辆没有逆行
34、dn*ci<0,车辆逆行
35、如果逆行,则逆行标识为ni+=1。
36、本发明实施例的另一目的在于提供一种基于目标跟踪的车辆逆行检测系统,所述系统包括:
37、初始化车道行驶方向模块;
38、车辆逆行检测模块;
39、其中,所述初始化车道行驶方向模块包括:
40、图像第一获取单元,用于获取路侧摄像头的视频图像;
41、车道信息获取单元,用于采用车道线检测算法对所述视频图像进行车道线检测,获取车道线信息f(x),车道信息ln,初始化车道的行驶方向标识dn=0;
42、车辆轨迹获取单元,用于利用车辆检测模型和跟踪模型,进行车辆检测和跟踪,得到每辆车在连续图像帧中的轨迹[(w1,h1),(w2,h2),(w3,h3),···,(wn,hn)];
43、车道行驶方向标识获取单元,用于根据车辆轨迹计算当前帧中每辆车的行驶方向ci,判断车辆所属车道,更新车道的行驶方向标识dn;
44、行驶方向标识监控单元,用于监控所有车道的行驶方向标识,直到所有车道的行驶方向标识abs(dn)>t时,初始化车道行驶方向阶段结束;
45、所述车辆逆行检测模块包括:
46、图像第二获取单元,用于获取路侧摄像头的视频图像;
47、逆行标识初始化单元,用于利用车辆检测模型和跟踪模型,进行车辆检测和跟踪,得到每辆车在连续图像帧中的轨迹[(w1,h1),(w2,h2),(w3,h3),···,(wn,hn)],并初始化车辆的逆行标识ni=0;
48、车辆逆行初步判断单元,用于根据车辆轨迹计算当前帧中每辆车的行驶方向ci,判断车辆所属车道,更新车道的行驶方向标识dn,并判断车辆是否逆行,如果逆行,则逆行标识为ni+=1;
49、车辆逆行二次判断单元,用于查看图像中每车辆的逆行标识位ni,如果ni>m,判定该车辆逆行,控制摄像头周围的喇叭/led显示屏播报警示信息;将数据保存并报警。
50、与现有技术相比,本发明的有益效果是:本发明提供了一种基于目标跟踪的车辆逆行检测方法及系统,本发明的逆行检测方法可以结合现有的路侧摄像头,将系统和算法部署到云端服务器,只需要拉取路侧摄像头的图片信息,获取摄像头附近的喇叭/led器件的控制,就能够实现自动获取车道信息,自动判断车道正确行驶方向,自动监控车辆逆行,及时提醒并报警车辆逆行情况,降低事故发生的可能性,减少监控车辆逆行对人工的依赖。
51、在执行效率上,相较于传统的人工监控,利用机器判断,大大的提高了车辆逆行的发现率和检出率,减少了对人工的依赖,也可以为交管部门提供相应的图像证据。相对于基于车辆检测的车辆逆行判断方式,本发明提出的方法能够自动获取车道信息和车道正确行驶方向信息,对维护人员的依赖比较低,部署更快,响应更快。
52、在经济效益方面,本发明提出的基于目标跟踪的车辆逆行检测方式及系统,相较于传统的人工监控,本发明大大减少对人工的依赖,只需要少校核人员,即可实时监控所有道路逆行情况。
53、社会效益上,本发明能够实时监控所有路侧摄像头,全时段全摄像头监控,及时发现车辆逆行,及时提醒驾驶员违规行为,阻止驾驶员持续逆行的危险操作,及时向附近车辆驾驶员告警,提前做好应对措施,大大降低由于逆行而造成事故的可能性。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188452.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。