一种无人机位置和卸载决策联合优化方法及装置
- 国知局
- 2024-07-31 21:07:02
本发明涉及一种无人机位置和卸载决策联合优化方法及装置,属于通信。
背景技术:
1、伴随着物联网和智能设备的发展,各种各样的物联网应用和服务不断涌现,比如自动驾驶、虚拟现实等,这些应用一般需要大量的计算资源或者对时延比较敏感,终端较弱的计算能力和有限的电量不能满足此类应用的需求。移动边缘计算利用布置在无线接入网边缘的服务器为用户提供计算资源,改善用户服务体验。物联网设备可能存在没有固定电源或者电池容量过小的问题,这限制了物联网应用和服务的长期运行,无限能量采集是一种解决能量短缺问题的有效方式。地面基站等位置固定的边缘设备不能根据用户的需求进行移动,限制了服务的质量。无人机可作为基站或中继提高通信系统性能,利用其移动性接近用户设备,建立视距链路和更好的通信信道。智能应用要求用户设备具有感知供能,通信、计算和感知的分离设计可能会有硬件设备成本高,频谱利用率差的缺点,同时考虑通信、计算和感知性能安排用户卸载决策、能量采集时间和无人机位置可以提高系统性能。
技术实现思路
1、本发明的目的在于克服现有技术中的不足,提供一种无人机位置和卸载决策联合优化方法及装置,该方法针对引入无线能量采集技术的通信感知计算一体化系统,考虑无人机和基站作为边缘节点为用户设备提供计算服务,用户任务采用二进制卸载模式,用户设备通过无线能量采集技术获得工作所需的能量,利用通感一体化信号将任务数据卸载至边缘节点,并利用一体化信号回波感知周围环境物体。通过合理的安排用户卸载决策和多无人机悬停的位置,降低用户完成任务的时延。
2、为达到上述目的,本发明是采用下述技术方案实现的:
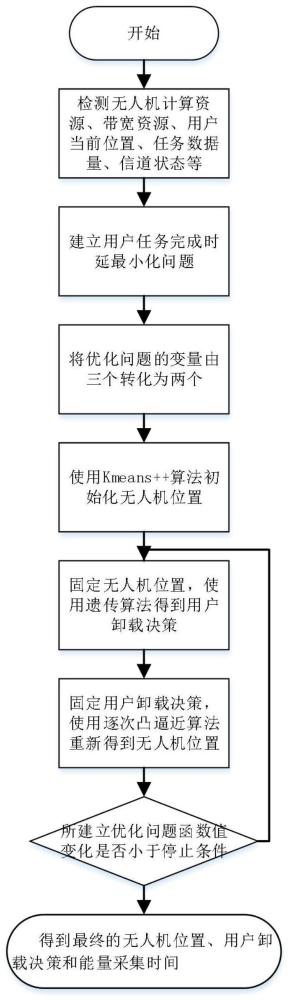
3、第一方面,本发明提供了一种无人机位置和卸载决策联合优化方法,包括:
4、s1、检测无人机关联数据;
5、s2、根据检测的无人机关联数据建立用户任务完成时延最小化问题;
6、s3、将所建立的用户任务完成时延最小化问题的变量由能量采集时间、用户卸载决策和无人机位置三个变量转化为用户卸载决策和无人机位置两个变量;
7、s4、根据无人机关联数据中的用户位置,初始化无人机位置;
8、s5、固定转化后问题的无人机位置变量,计算得到用户卸载决策;
9、s6、固定转化后问题的用户卸载决策变量,计算得到无人机位置;
10、s7、重复步骤s5-s6,直至用户任务完成时延的变化小于所规定阈值;
11、s8、根据最终得到的用户卸载决策和无人机位置计算能量采集时间;
12、s9、根据计算所得的能量采集时间采集能量,并根据得到的用户卸载决策向无人机或者基站卸载任务,无人机飞行到最终得到的无人机位置上为用户提供计算服务。
13、进一步的,所述步骤s1中,无人机关联数据包括无人机计算资源、基站计算资源、用户位置、信道状态、任务数据量、带宽资源。
14、进一步的,所述步骤s2中,根据检测的无人机关联数据建立用户任务完成时延最小化问题,包括:
15、s2.1、计算用户m采集的能量,公式如下:
16、
17、其中ηm表示用户m的能量转化效率,表示用户m采集能量的时长,表示用户m与能量发射器k之间的信道增益,表示能量发射器k的发射功率,表示用户m是否采集能量发射器k发出的能量,当用户设备m采集能量发射器k发射的能量时,反之用户设备采集距离最近的能量发射器发射的能量;
18、s2.2、计算用户设备m与无人机n之间的信息传输速率,公式如下:
19、
20、其中b表示用户设备的带宽,pm表示用户设备m的发射功率,表示用户设备m和无人机n之间的信道增益,ξ0表示用户设备和无人机之间距离为1时的参考信道增益,dm,n表示用户设备m与无人机n的距离,σ2=n0b表示加性高斯白噪声功率,n0表示加性高斯白噪声功率谱密度;
21、计算用户设备m与基站之间的信息传输速率,公式如下:
22、
23、其中表示用户设备m与基站之间的信道增益,τm表示独立随机信道衰落因子,服从尺度分布为κ的瑞利分布,dm表示用户设备m与基站的距离,c表示光速,fc表示载波的中心频率;
24、计算用户设备m与无人机n之间的数据传输时间,公式如下:
25、
26、计算用户设备m与基站之间的数据传输时间,公式如下:
27、
28、计算用户设备m的数据传输时间,公式如下:
29、
30、计算用户设备m卸载数据的能耗,公式如下:
31、
32、s2.3、设定基站和无人机将其计算资源平均分配给与之建立连接的用户设备,当用户设备m将任务卸载给无人机n时,计算无人机n为用户设备m计算任务所消耗的时间,公式如下:
33、
34、其中表示无人机n的计算能力,im表示用户设备m产生的任务数据量,dm表示用户设备m的任务计算强度;
35、当用户设备m将任务卸载给基站时,计算基站为用户设备m计算任务所消耗的时间,公式如下:
36、
37、其中fbs表示基站的计算能力;
38、计算用户设备m卸载数据的计算时间,公式如下:
39、
40、当用户设备m在本地处理任务时,计算用户设备m的本地计算时间,公式如下:
41、
42、其中fm表示用户设备m的计算能力;
43、计算用户设备m的本地计算能耗,公式如下:
44、
45、其中λm表示用户设备m的有效电容系数;
46、s2.4、计算用户m与无人机n通信时所得到的条件互信息,公式如下:
47、
48、其中表示用户m的雷达信干燥比,ts表示ofdm一体化信号的符号周期,qm表示用户m感知信道脉冲响应的傅里叶变换;
49、计算用户m与基站通信时所得到的条件互信息,公式如下:
50、
51、计算用户m所得到的条件互信息,公式如下:
52、
53、s2.5、计算用户m任务处理总时延,公式如下:
54、
55、计算用户设备总时延最小化的问题,公式如下:
56、
57、其中表示用户设备m的能耗,mimin表示用户设备m的最小条件互信息要求,xmax和ymax分别表示无人机x轴与y轴坐标的最大值,为用户设备集合,为无人机的集合;表示用户设备卸载决策变量集合,表示用户设备能量采集时长的变量集合,表示无人机悬停的位置变量集合,约束(c1)表示用户设备消耗的能量应该小于采集的能量;约束(c2)表示用户设备卸载计算时所得到的条件互信息应当大于最小值mimin;约束(c3)和(c4)表示用户设备有本地计算、无人机计算、基站计算三种任务计算方式,并且只能向一个无人机卸载数据;约束(c5)表示无人机只能在固定范围内悬停。
58、进一步的,所述步骤s3中,将所建立的用户任务完成时延最小化问题的变量由能量采集时间、用户卸载决策和无人机位置三个变量转化为用户卸载决策和无人机位置两个变量,包括:
59、计算用户设备m能量采集时间的最优值,公式如下:
60、
61、将变量tcharge关于β和luav的封闭表达式代入问题p1后,问题p1转化为问题p2,公式如下:
62、
63、进一步的,所述步骤s4中,根据无人机关联数据中的用户位置,初始化无人机位置,包括:
64、s4.1、随机选择一个用户位置作为第一个初始聚簇中心;
65、s4.2、计算所有用户离当前已确定的最近的聚簇中心的距离distance,根据公式计算所有用户的位置成为下一个初始聚簇中心的概率,其中m表示用户m的序号;
66、s4.3、通过轮盘赌法确定新的聚簇中心,根据每一个用户位置成为下一个初始聚簇中心的概率将区间[0,1]分为q个区间,其中q为用户总数,随机产生一个0到1之间的随机数,随机数所处区间对应的用户位置就是新的聚簇中心位置;
67、s4.4、重复步骤s4.2-s4.3直至选择出剩余的n-1个初始聚簇中心,n为无人机个数;
68、s4.5、将最近的聚簇中心是同一个聚簇中心的用户划分到同一个簇中;
69、s4.6、将每个簇中所有用户位置横坐标的平均值作为新的簇中心的横坐标,所有用户位置纵坐标的平均值作为新的簇中心的纵坐标;
70、s4.7、重复步骤s4.5-s4.6直至所有聚簇中心的变化小于阈值或达到最大循环数;
71、s4.8、聚簇中心的位置就是无人机的初始位置。
72、进一步的,所述步骤s5中,固定转化后问题的无人机位置变量,计算得到用户卸载决策,包括:
73、s5.1、当无人机位置luav确定时,优化问题p2转化为子问题p2.1,公式如下:
74、
75、问题p2.1为整数规划问题,采用遗传算法对问题p2.1进行求解;
76、s5.2、初始化种群个体数c、个体编码长度ε、交叉概率ο和循环次数ψ;
77、s5.3、对种群个体进行编码,采用二进制编码,与每个用户设备相关的编码位数为其中表示向上取整,用户设备采用本地计算这个策略时,对应的编码为十进制0的二进制形式,卸载至基站这个决策对应的编码为十进制1的二进制形式,卸载至无人机n的二进制编码为十进制n+1的二进制形式,种群中个体的编码由所有用户设备的二进制编码前后拼接而成;
78、s5.4、计算种群个体适应度,引入一个惩罚因子v将问题p2.1的约束转化到目标函数上,再将转化后的函数的负值作为个体的适应度,公式如下:
79、
80、其中惩罚因子v是一个很大的正常数,和分别表示第i个个体编码对应的用户设备m的卸载决策以及根据决策得到的用户设备m的能耗、时延和条件互信息;
81、s5.5、对种群个体进行选择,计算种群中所有个体适应度的总和,然后把个体适应度与适应度总和的比值作为该个体被选中的概率,公式如下:
82、
83、其中c表示种群个体数,最后使用轮盘赌算法选择出新的c个个体;
84、s5.6、对种群个体进行交叉,随机选择两个个体,并随机选取一个编码位置作为交叉点,然后交叉所选中个体编码交叉点以后的部分,交叉后需要重新选择无实际意义的那段编码所对应的用户设备的决策;
85、s5.7、对种群个体进行变异,变异的操作是随机选择某一个个体编码中的一位,将其变换为其他的编码;
86、s5.8、重复步骤s5.4-s5.7,直至循环次数达到规定循环次数ψ;
87、s5.9、从种群中找到最优个体并记录其适应度;
88、s5.10、对最优个体的编码进行解码,并根据适应度计算问题p2.1目标函数;
89、s5.11、最优个体所对应的用户卸载决策便是所需的卸载决策。
90、进一步的,所述步骤s6中,固定转化后问题的用户卸载决策变量,计算得到无人机位置,包括:
91、s6.1、当用户卸载决策β确定时,优化问题p2转化为子问题p2.2,公式如下:
92、
93、其中表示向无人机卸载数据的用户设备集合,表示用户设备m和其卸载数据的无人机mtr之间的信道增益,再次引入一个辅助变量φm和一个新的约束条件问题p2.2重新表示为:
94、
95、其中表示辅助变量集合;
96、s6.2、初始化泰勒展开点迭代次数r=0,算法停止条件;
97、s6.3、建立近似优化问题,采用逐次凸逼近的方法得到问题p2.3的局部最优解,首先,将约束(c6)中的在固定点进行一阶泰勒展开得:
98、
99、其中然后将上式代入问题p2.3,问题2.3便成为一个凸优化问题;
100、s6.4、使用cvx工具箱求解凸优化问题得到无人机位置luav(r+1);
101、s6.5、更新泰勒展开点
102、s6.6、重复步骤s6.3-s6.5,直至问题p2.3目标函数值变化满足停止条件;
103、s6.7、循环结束后将问题p2.3的解作为无人机位置。
104、进一步的,所述步骤s8根据最终得到的用户卸载决策和无人机位置计算能量采集时间的具体公式为
105、第二方面,本发明提供一种无人机位置和卸载决策联合优化装置,包括:
106、检测模块,用于检测无人机关联数据;
107、问题建立模块,用于根据检测的无人机关联数据建立用户任务完成时延最小化问题;
108、转化模块,用于将所建立的用户任务完成时延最小化问题的变量由能量采集时间、用户卸载决策和无人机位置三个变量转化为用户卸载决策和无人机位置两个变量;
109、初始化模块,用于根据无人机关联数据中的用户位置,初始化无人机位置;
110、第一计算模块,用于固定转化后问题的无人机位置变量,计算得到用户卸载决策;
111、第二计算模块,用于固定转化后问题的用户卸载决策变量,计算得到无人机位置;
112、迭代模块,用于重复执行第一计算模块和第二计算模块,直至用户任务完成时延的变化小于所规定阈值;
113、第三计算模块,用于根据最终得到的用户卸载决策和无人机位置计算能量采集时间;
114、处理模块,用于根据计算所得的能量采集时间采集能量,并根据得到的用户卸载决策向无人机或者基站卸载任务,无人机飞行到最终得到的无人机位置上为用户提供计算服务。
115、第三方面,本发明提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现前述任一项所述方法的步骤。
116、与现有技术相比,本发明所达到的有益效果:
117、1、本发明考虑了无人机和基站作为边缘节点为用户设备提供计算服务,用户任务采用二进制卸载模式,用户设备通过无线能量采集技术获得工作所需的能量,利用通感一体化信号将任务数据卸载至边缘节点,并利用一体化信号回波感知周围环境物体。考虑了用户采集和消耗的能量因果性、条件互信息、无人机位置的要求,将用户任务完成时延作为目标。
118、2、本发明根据检测的数据建立了用户任务完成总时延最小化问题,首先利用推导的闭合表达式将关于用户设备采集时间、卸载决策和无人机位置三个变量的原问题转化为关于用户设备卸载决策和无人机位置两个变量的优化问题,并进一步将其分解为用户设备卸载决策优化子问题和无人机位置优化子问题,最终采用交替迭代的方法解决,得到最终的用户卸载决策、能量采集时间和无人机位置。
119、3、本发明使用一种基于遗传算法的用户设备卸载决策优化算法解决用户设备卸载决策优化子问题,使用一种基于kmeans++和逐次凸逼近算法的无人机位置优化算法解决无人机位置优化子问题。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188435.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表