一种山区弯道雾天环境智能限速系统及方法
- 国知局
- 2024-07-31 21:07:21
本发明涉及高速公路交通安全管理,具体涉及一种山区弯道雾天环境智能限速系统及方法。
背景技术:
1、我国地形多样复杂,山区面积广大,占全国总面积的2/3。我国依据使用任务、功能和适应交通量等因素将公路划分为高速公路、一级公路、二级公路、三级公路以及四级公路;其中,高速公路和一级公路属于高等级公路,二级公路居中属于中等级公路,三级公路和四级公路属于低等级公路,而低等级公路为双车道或单车道且年平均交通量在6000辆以下。
2、近些年来,随着国家发展的需要,山区交通事业呈现快速发展的势头。大部分山区公路位于山岭地区,路线迂回曲折,纵坡度较大,该类公路多为半径在40m~100m,能见度范围为30m~200m,纵坡坡度范围为5%~10%的山区低等级公路,这种地形使得车辆行驶时难以控制速度和方向,增加了事故发生的可能性和危险性。且弯道和陡坡也使得驾驶员的视距受到限制,无法看到远处的情况,对行车安全造成影响。由于山区地势高,周围环境湿度大,气温变化显著,空气中的水汽容易在路面和山壁上凝结成雾。同时,山区风向和风速变化大,这也就影响了雾的扩散和移动,容易形成团雾,其持续时间长也加剧了其对道路安全的影响。
3、目前,对于这类雾天的山区低等级公路弯道主要采取传统的静态限速的方式,即依照该路段线形等静态条件,对路段使用固定不变的限速值,但山区交通事业的发展必将使得山区弯道公路的年平均交通量有所提高,传统的限速方案已不再适用;若将雾天的山区低等级公路弯道的限速值设置过低,则无法适应交通量的提高使得行车效率较低,若将雾天的山区低等级公路弯道的限速值设置过高,则无法保障行车安全性,且由于雾天天气路段环境是动态变化的,固定的限速值无法平衡行车效率与安全性。
技术实现思路
1、本发明意在提供一种山区弯道雾天环境智能限速系统及方法,以解决现有限速方式无法使用于雾天的山区低等级公路弯道。
2、为达到上述目的,本发明采用如下技术方案:一种山区弯道雾天环境智能限速方法,包括:
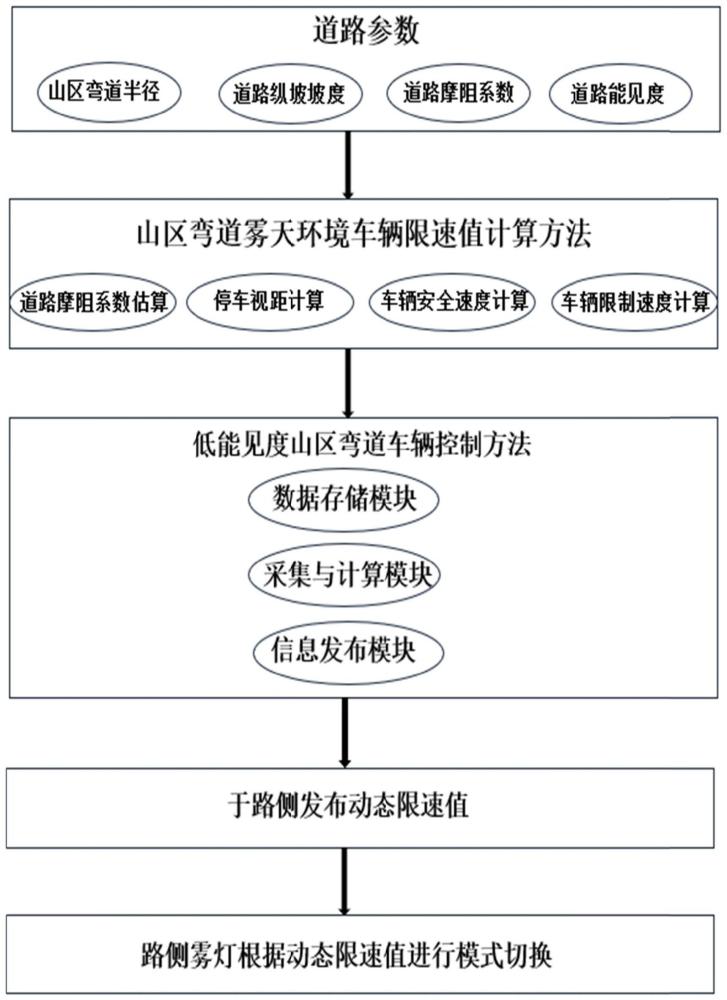
3、s1、动态采集山区弯道的道路参数,道路参数包括:弯道半径、道路摩阻系数、道路纵坡坡度和道路能见度,并对道路能见度进行修正获得实际能见度,并根据道路能见度划分风险能见度等级;
4、s2、根据道路参数依次计算出车辆安全停车视距和车辆安全行驶速度;
5、s3、由车辆安全行驶速度调整得到目标限速值;
6、s4、根据风险能见度等级制定不同的动态多段式限速方案,依照相应的动态多段式限速方案发布目标限速值;
7、s1中,当山区弯道为雾天时,道路摩阻系数根据实际能见度由道路摩阻系数的计算公式计算获得,
8、道路摩阻系数的计算公式:μ=0.000025(vsi*10-2)3+0.006(vsi*10-2)2+0.3;
9、其中,μ为道路摩阻系数,vsi为实际能见度。
10、本方案的原理及优点是:本方案采用弯道半径、道路摩阻系数、道路纵坡坡度和道路能见度等多个参数,体现山区低等级公路弯道的路况和气候条件的复杂度,考虑多种因素的叠加更加精准的计算限速值,其中的道路能见度为动态值,由本方案得到的目标限速值能随天气变化实时变化,当能见度较低时,得到的目标限速值也相对较低以保障安全性,当能见度较高时,得到的目标限速值也相对较高以提高行车效率,相较现有的静态限速方式,本方案提供的限速方式更加灵活,在考虑多种风险因素后给出最佳的限速值,有效平衡行车效率和安全性;依照不同的能见度采用针对性的方式发布目标限速值,也是对安全性和行车效率的提高;
11、同时,本方案将道路摩阻系数考虑进去,现有技术通常认为道路摩阻系数仅与路面材料结构等固定因素有关,但实际上,雾天潮湿,雾气附着在路面会造成路面摩擦能力的降低,从而预先测得的道路摩阻系数固定值以失去有效性,现有技术中少数将测得的道路摩阻系数按一定比例折减,如晴天、雨天、雪天分别乘以固定系数,但实时性仍存在缺陷;而本方案建立了道路摩阻系数与动态可检测的能见度的映射关系,由能见度体现当前雾的大小也反应当前湿度大小,使得道路摩阻系数是一个可通过实时监测并计算出的有效数值,对于不同浓度的雾天都有较好的适应性,并提高了山区弯道精准调控限速的准确率和可靠性;使得目标限速值对环境因素的波动更加敏感,能够根据气象条件的变化实时变化,且式中0.000025、0.006和0.3等数值为拟合数值,对理想计算结果进行修订,使最终计算结构更加符合实际情况,保障安全性的同时提高行车效率。
12、优选的,作为一种改进,s2中车辆安全停车视距的计算公式为:
13、
14、其中,s为车辆安全停车视距,u为折减值,vd为设计速度,tr为驾驶员响应时间,g为重力加速度,ls为安全距离。
15、该改进的有益效果是:式中为驾驶员在得到停车指令后至作出制动反应前这一时间段车辆的滑行距离,为驾驶员作出制动反应后车辆完全停下这一时间段车辆的滑行距离,为保障安全性,还需车辆在停车过程中与前车保持安全距离ls,因车辆实际停车距离与计算理想值存在差距,则利用折减值u使计算数值更贴近实际情况,其中,车辆制动减速度与道路摩阻系数相关,路面越湿摩擦力越小,则车辆滑行越远,则建立车辆制动减速度与道路摩阻系数的关系,提高车辆安全停车视距计算的准确性。
16、优选的,作为一种改进,s2中车辆安全行驶速度的计算公式为:
17、
18、其中,vc为车辆安全行驶速度,i为道路纵坡坡度,r为弯道半径。
19、该改进的有益效果是:式中,为受停车视距限制的车辆速度,为受山区侧滑临界速度,使得车辆安全行驶速度受这两方面限制,式中的18.8、0.5和-47.2同样也为拟合数值,进一步修订结果使更符合时间车辆行驶情况。
20、优选的,作为一种改进,s1中获得实际能见度并划分风险能见度等级的具体方式为:
21、当vsic在30m-50m之间时,并将该道路能见度划分为ⅰ级风险能见度;
22、当vsic在50m-80m之间时,并将该道路能见度划分为ⅱ级风险能见度;
23、当vsic在80m-150m之间时,并将该道路能见度划分为ⅲ级风险能见度;
24、当vsic在150m-200m之间时,并将该道路能见度划分为ⅳ级风险能见度;
25、其中,vsic为动态采集到的道路能见度,vsi为修订后的实际能见度。
26、该改进的有益效果是:将采集到的道路能见度调整,使得能见度数值更加符合驾驶员肉眼所见情况,并根据不同的能见度数值进行风险等级的划分,便于更加有针对性实施目标限速值的发布。
27、优选的,作为一种改进,s4中,动态多段式限速方案包括四段式限速方案和二段式限速方案,四段式限速方案为沿车辆行驶方向在车辆进入弯道前分四次发布限速值,四次限速值依次递减,最后一次发布的限速值为目标限速值;二段式限速方案为沿车辆行驶方向在车辆进入弯道前分两次发布限速值,两次限速值依次递减,最后一次发布的限速值为目标限速值;
28、当道路能见度为ⅰ级风险能见度和ⅱ级风险能见度时,采用四段式限速方案发布目标限速值;当道路能见度为ⅲ级风险能见度和ⅳ级风险能见度时,采用二段式限速方案发布目标限速值。
29、该改进的有益效果是:由分段式减速,使车辆提前减速,避免减速幅度过大致使意外情况的发生,同时由该限速方式,能够解决起雾时间不确定、地点不确定以及雾气持续时间不确定的问题,使车辆早减速并缓慢减速;
30、ⅰ级风险能见度和ⅱ级风险能见度相较ⅲ级风险能见度和ⅳ级风险能见度危险性更高,目标限速值更小,车辆速度的减速幅度更大,则需将减速幅度细分为更多阶段,使车辆在减速至目标限速值过程中减速更加均匀,也可控制车辆在每一阶段的减速幅度均处于安全范围内;同时,二段式限速方案也使处于危险性较低的ⅲ级风险能见度和ⅳ级风险能见度情况的车辆能够尽快通行,提高行车效率。
31、优选的,作为一种改进,四段式限速方案具体包括:四次限速值分别为第一次限速值1.5v、第二次限速值1.4v、第三次限速值1.3v和第四次限速值1v,四次限速值的发布位置依次为弯道直圆点前的400m、300m、200m和100m处;
32、二段式限速方案具体包括:两次限速值分别为第一次限速值kv和第二次限速值v,第一次限速值的发布位置为弯道直圆点前的400m~300m处,第二次限速值的发布位置为弯道直圆点前的200m~100m处,当道路能见度为ⅲ级风险能见度时,k的取值为1.3,当道路能见度为ⅳ级风险能见度,k的取值为1.2;
33、其中,v为目标限速值。
34、该改进的有益效果是:提供了各阶段长度和限速值变化比例,保障车辆减速的安全性,针对限速次数较少的二段式限速方案,针对不同风险能见度分别给出不同限速值变化比例,使得对车辆的减速控制更加具体精准。
35、优选的,作为一种改进,s3中由车辆安全行驶速度调整得到目标限速值具体为:采用向下取值法,取一个小于等于车辆安全行驶速度的最大整数值作为目标限速值,且目标限速值为5的倍数值;
36、对四段式限速方案中发布的四次限速值和二段式限速方案中发布的两次限速值采用向下取值法处理,即取一个小于等于第n次限速值的最大的整数值作为该处的最终发布的限速值,且限速值为5的倍数值,第n次限速值包括第一次限速值、第二次限速值、第三次限速值和第四次限速值。
37、该改进的有益效果是:使多个限速值呈取5的倍数值梯度显示,使驾驶者更易理解数值变化幅度并快速做出反应,车辆安全行驶速度受环境影响呈动态波动,取倍数值作为目标限速值降低数值的变化频率,目标限速值呈反复波动使得驾驶员无法获得明确指示,且向下取值也保障了安全性。
38、为使一种山区弯道雾天环境智能限速方法能够得到较好实施,本方案还提供了用于实现该方法的一种山区弯道雾天环境智能限速系统,包括数据存储模块、采集和计算模块和信息发布模块;
39、所述数据存储模块用于存储预先采集到的所述道路参数,并向所述采集和计算模块提供道路参数;
40、所述采集和计算模块,用于实时采集道路天气信息,并计算弯道路段的道路摩阻系数和车辆在弯道路段的目标限速值,并将计算结果和相关天气信息提供给信息发布模块;
41、所述信息发布模块与道路管理中心通信连接,用于对道路的天气信息进行实时判断当前风险能见度等级,依照判断结果选择相应动态多段式限速方案,处理并发布限速信息。
42、该改进的有益效果是:由该系统为山区弯道雾天环境智能限速方法的实施提供条件。
43、优选的,作为一种改进,所述采集和计算模块包括用于采集道路能见度的数字摄像能见度仪,数字摄像能见度仪包括前端能见度仪和后端能见度仪,前端能见度仪位于弯道直圆点前200m处,前端能见度仪朝向车辆行驶方向,后端能见度仪位于弯道的曲中点处外侧;采集和计算模块选取数字摄像能见度仪采集到的能见度信息中的最小值作为道路能见度;
44、所述信息发布模块包括用于提前警示驾驶员减速慢行的可变限速预告牌和可变限速牌,可变限速预告牌呈门架式设于弯道直圆点前400m处,可变限速预告牌采用led点阵屏,当道路能见度位于小于等于200m时,可变限速预告牌显示“前方有雾,减速慢行”;可变限速牌为多个,依次设置在弯道直圆点前每100m处。
45、该改进的有益效果是:采前后两台能见度仪分别位于进入弯道前的路段和弯道中的路段,这两段路为车辆减速关键路段,两台能见度仪的检测方向相对,能够避免因减速路段中起雾点不明确造成的能见度检测不准确的问题,该设置高度也能防止山区道路粉尘,雨雪以及其他障碍物的干扰;在车辆进入减速路段时,利用门架式可变限速预告牌且为led点阵屏,使得驾驶员在雾天也能明确获取警示信息,更加注意观察沿途限速牌和来往车辆。
46、优选的,作为一种改进,所述信息发布模块还包括雾灯,雾灯为多个依次等距间隔排列,设置在由所述可变限速预告牌至弯道结束之间路段的道路两侧;
47、当目标限速值在20km/h~40km/h时,雾灯执行“红灯闪烁”,闪烁频率在1.35hz~1.5hz;
48、当限速值在40km/h~70km/h时,雾灯执行“黄灯闪烁”,闪烁频率在0.8hz~1hz。
49、该改进的有益效果是:利用雾灯提醒驾驶员弯道变化注意转向,且由红黄色区别也使驾驶员更直观了解当前能见度对应的危险情况,且雾灯相应的闪烁频率也使驾驶员更易看到雾灯。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188453.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表