交通安全辅助系统及交通安全辅助方法与流程
- 国知局
- 2024-07-31 21:09:28
本发明涉及一种交通安全辅助系统及交通安全辅助方法。更详细而言,涉及一种对对象交通区域中的人或作为移动体的交通参与者的安全进行辅助的交通安全辅助系统及交通安全辅助方法。
背景技术:
1、在公共交通中,四轮汽车、摩托车及自行车等移动体和步行者等各种交通参与者,基于各自的意愿以各不相同的速度移动。作为用于提高这种公共交通中的交通参与者的安全性和便利性等的技术,例如在专利文献1中示出一种移动体辅助系统,所述移动体辅助系统借由预测交通参与者的将来,来辅助移动体的安全移动。
2、更具体而言,在专利文献1示出的移动体辅助系统中,获取与第一移动体的周边的交通参与者有关的参与者信息,基于所获取的参与者信息,预测交通参与者的将来的状态,生成包含所预测的交通参与者的将来的状态的共有地图信息,并基于所生成的共有地图信息,将与第一移动体不同的第二移动体设定为要辅助对交通参与者的应对的辅助对象,进而向该辅助对象提供基于上述预测结果的信息。
3、根据这种移动体辅助系统,例如在共通的交叉路口存在第一移动体、第二移动体及步行者的情况下、且从第一移动体可以识别到步行者但从第二移动体无法识别到步行者的情况下,向被设定为辅助对象的第二移动体提供基于由第一移动体获取的信息的对步行者的将来的预测结果,因此,可以事先避免第二移动体与步行者之间的风险。
4、[先前技术文献]
5、(专利文献)
6、专利文献1:日本特开2020-42553号公报
技术实现思路
1、[发明所要解决的问题]
2、专利文献1中示出的移动体辅助系统对于避免两者即在上述的例子中第二移动体及步行者两者成为主要当事人的风险,是有效的。然而,在专利文献1中,关于三者以上的多个交通参与者成为当事人,在这些多个交通参与者之间连锁发生的风险,未充分探讨。
3、本发明的目的在于,提供一种交通安全辅助系统及交通安全辅助方法,借由助力于避免三者以上的多个交通参与者成为当事人的风险,可以提高交通的安全性、便利性及顺畅性。
4、[解决问题的技术手段]
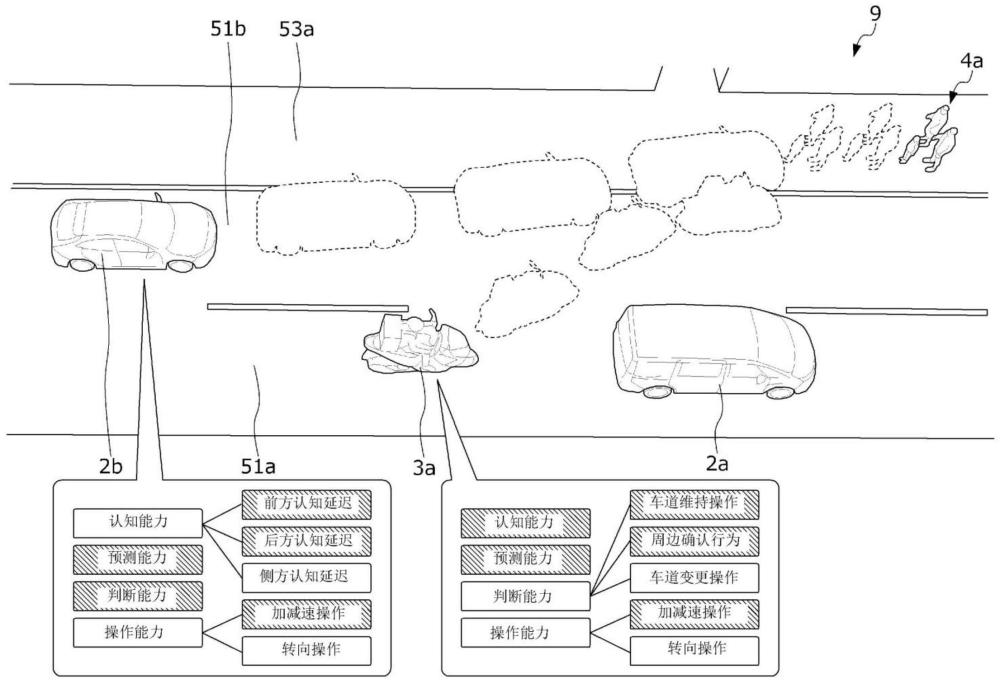
5、(1)本发明的交通安全辅助系统(例如,后述的交通安全辅助系统1)的特征在于,包括:识别手段(例如,后述的对象交通区域识别单元60、车载驾驶辅助装置21、车载通信装置24、便携信息处理终端25、车载驾驶辅助装置31、车载通信装置34、便携信息处理终端35、便携信息处理终端40、信号控制装置55、基础设施相机56及交通环境数据库64),识别对象交通区域(例如,后述的对象交通区域9)中的人(例如,后述的步行者4及步行者群4a)或作为移动体(例如,后述的四轮汽车2,2a,2b及摩托车3,3a)的交通参与者,获取与各交通参与者有关的识别信息(例如,后述的交通参与者识别信息及交通环境识别信息);驾驶主体信息获取手段(例如,后述的驾驶主体信息获取单元61、驾驶主体状态传感器23、车载通信装置24、便携信息处理终端25、骑手状态传感器33、车载通信装置34、便携信息处理终端35及驾驶历史数据库65),获取与被前述识别手段识别为交通参与者的移动体的驾驶主体的驾驶能力相关的状态信息(例如,后述的驾驶主体状态信息);预测手段(例如,后述的预测单元62),基于前述识别信息及前述状态信息,预测由前述识别手段识别到的多个交通参与者的将来;及,通知手段(例如,后述的协调辅助信息通知单元63、驾驶者人机接口(humanmachine interface,hmi)22、车载通信装置24、便携信息处理终端25、骑手hmi 32、车载通信装置34、便携信息处理终端35、便携信息处理终端40),基于前述预测手段的预测结果,向前述预测手段的多个预测对象之中的至少任一者通知辅助信息;并且,前述预测手段在前述预测对象也就是第一、第二及第三交通参与者之中的前述第一及第二交通参与者为前述对象交通区域中的第一及第二移动体且由前述驾驶主体信息获取手段获取到前述第一及第二移动体的至少任一者的状态信息的情况下,基于前述识别信息及前述状态信息,预测前述第一移动体的将来的举动、与该第一移动体的将来的举动相应的前述第二移动体的将来的举动、及与前述第一及第二移动体的至少任一者的将来的举动相应的前述第三交通参与者在将来的风险。
6、(2)此时优选的是,前述通知手段在由前述预测手段预测到前述第三交通参与者在将来发生风险的情况下,向前述第三交通参与者的通信接口(例如,后述的事例1中的步行者群4a的便携信息处理终端、及后述的事例2中的第二四轮汽车2b的车载通信装置)通知前述辅助信息。
7、(3)此时优选的是,前述驾驶主体信息获取手段在前述驾驶主体为人的情况下,基于前述驾驶主体的生物体信息、外观信息及语音信息中的至少任一者的驾驶过程中的时间推移数据,来获取前述状态信息。
8、(4)此时优选的是,前述驾驶主体信息获取手段在前述驾驶主体为人的情况下,基于前述驾驶主体的过去的驾驶历史及前述状态信息中的至少任一者来获取与前述驾驶主体的特性有关的特性信息(例如,后述的驾驶主体特性信息),前述预测手段基于前述识别信息、前述状态信息及前述特性信息对前述预测对象的将来进行预测。
9、(5)此时优选的是,前述识别手段获取与包括前述对象交通区域中的各交通参与者及前述对象交通区域中的各交通参与者的交通环境在内的识别对象有关的前述识别信息。
10、(6)此时优选的是,前述预测手段借由计算机来构筑模拟了前述对象交通区域的虚拟空间,并且借由进行前述虚拟空间上的基于前述识别信息及前述状态信息的模拟实验,对前述预测对象的将来进行预测。
11、(7)此时优选的是,前述预测手段包括:行为推定手段(例如,后述的行为推定部623),将包含前述识别信息及前述状态信息之中的至少前述识别信息的第一输入、与预先制定的多个驾驶主体的模式行为中的至少一者建立关联;及,模拟器(例如,后述的模拟器626),借由在前述虚拟空间上进行基于由前述行为推定手段建立关联的模式行为的模拟实验,对前述预测对象的将来进行预测。
12、(8)此时优选的是,前述行为推定手段包括:驾驶能力推定手段(例如,后述的驾驶能力推定部624),基于前述第一输入,针对每个能力要素来推定前述驾驶能力的下降;及,关联建立手段(例如,后述的关联建立部625),将由前述驾驶能力推定手段推定为下降的能力要素、与多个前述模式行为中的至少一者建立关联。
13、(9)此时优选的是,前述驾驶能力分为前述驾驶主体的认知能力、预测能力、判断能力及操作能力中的至少四个能力要素。
14、(10)此时优选的是,前述预测手段包括:高风险交通参与者确定手段(例如,后述的高风险交通参与者确定部621),基于包含前述识别信息及前述状态信息之中的至少前述识别信息的第二输入,从由前述识别手段识别到的多个交通参与者中,将被推定将来采取规定的连锁风险诱发行动的可能性高的交通参与者,确定为高风险交通参与者;及,预测对象决定手段(例如,后述的预测对象决定部622),将前述高风险交通参与者作为前述第一交通参与者,将从该第一交通参与者的周围存在的多个交通参与者中提取的两者决定为前述第二及第三交通参与者。
15、(11)本发明的交通安全辅助方法借由计算机(例如,后述的协调辅助装置6)来辅助交通参与者的安全,其特征在于,包括以下工序:识别对象交通区域(例如,后述的对象交通区域9)中的人(例如,后述的步行者4及步行者群4a)或作为移动体(例如,后述的四轮汽车2,2a,2b及摩托车3,3a)的交通参与者,获取与各交通参与者有关的识别信息(例如,后述的交通参与者识别信息及交通环境识别信息)的工序(例如,后述的图4中的步骤st1的工序);获取与被识别为交通参与者的移动体的驾驶主体的驾驶能力相关的状态信息(例如,后述的驾驶主体状态信息)的工序(例如,后述的图4的步骤st2的工序);基于前述识别信息及前述状态信息,对从识别到的多个交通参与者中选定的多个预测对象的将来进行预测的工序(例如,后述的图4的步骤st3的工序);及,基于对前述预测对象的预测结果,向多个前述预测对象之中的至少任一者通知辅助信息(例如,后述的协调辅助信息)的工序(例如,后述的图4的步骤st4的工序);在对前述预测对象的将来进行预测的工序中,在前述预测对象也就是第一、第二及第三交通参与者之中的前述第一及第二交通参与者为前述对象交通区域中的第一及第二移动体且获取到前述第一及第二移动体的至少任一者的状态信息的情况下,基于前述识别信息及前述状态信息,预测前述第一移动体的将来的举动、与该第一移动体的将来的举动相应的前述第二移动体的将来的举动、及与前述第一及第二移动体的至少任一者的将来的举动相应的前述第三交通参与者在将来的风险。
16、(发明的效果)
17、(1)在本发明的交通安全辅助系统中,预测手段基于由识别手段获取的与各交通参与者有关的识别信息、及与被识别为交通参与者的移动体的驾驶主体的驾驶能力相关的状态信息,对由识别手段识别到的多个交通参与者的将来进行预测。因而,预测手段可以考虑特定的移动体的驾驶主体的当时的驾驶能力的下降,包括该特定的移动体的不正规的行动在内,对多个交通参与者的将来进行预测。另外,通知手段借由基于预测手段对多个预测对象的预测结果,向这些预测对象之中的至少任一者通知辅助信息,可以事先避免针对这些预测对象所预测到的风险,所以,可以提高交通的安全性、便利性及顺畅性。
18、尤其是,在本发明中,预测手段在作为预测对象的第一、第二及第三交通参与者之中的第一及第二交通参与者为对象交通区域中的第一及第二移动体且获取到这些第一及第二移动体各自的驾驶主体之中的至少任一者的状态信息的情况下,基于识别信息及状态信息,预测第一交通参与者的将来的举动、与该第一交通参与者的将来的举动相应的第二交通参与者的将来的举动、及与这些第一及第二交通参与者的至少任一者的将来的举动相应的第三交通参与者在将来的风险。另外,通知手段基于对这些第一及第二交通参与者的将来的举动的预测结果以及对第三交通参与者在将来的风险的预测结果,向这些第一及第二移动体以及第三交通参与者中的至少任一者通知辅助信息。由此,可以事先避免包括第一、第二及第三交通参与者在内的三者以上成为当事人,因第一及第二交通参与者之中的至少任一者的驾驶主体的驾驶能力的下降,而在这些多个交通参与者之间连锁发生,并波及第三交通参与者的连锁风险。由此,根据本发明,可以进一步提高交通的安全性、便利性及顺畅性。
19、(2)在以第三交通参与者为主体来观察的情况下,大多难以事先预测在自身以外的第一及第二交通参与者之间连锁发生,并最终可能波及自身的连锁风险。因此,大多情况下,第三交通参与者采取用于避免这种连锁发生的风险的行动的、时间上的余裕少。相对于此,在本发明的交通安全辅助系统中,通知手段在由预测手段预测到第三交通参与者在将来发生连锁风险的情况下,向第三交通参与者所持有的通信接口通知辅助信息。由此,可以确保第三交通参与者采取用于避免连锁发生的风险的行动的时间,所以,可以提高第三交通参与者的安全性。
20、(3)在本发明的交通安全辅助系统中,驾驶主体信息获取手段在驾驶主体为人的情况下,基于该驾驶主体的生物体信息、外观信息及语音信息中的至少任一者的驾驶过程中的时间推移数据,来获取状态信息。在预测手段中,借由使用这种状态信息,可以在恰当地掌握正在驾驶的驾驶主体的驾驶能力的基础上,预测由该驾驶主体驾驶的移动体的将来的举动,所以,可以预测可能波及预测对象的各种风险。由此,根据本发明,可以进一步提高交通的安全性、便利性及顺畅性。
21、(4)在本发明的交通安全辅助系统中,驾驶主体信息获取手段在驾驶主体为人的情况下,基于驾驶主体的过去的驾驶历史及时间推移性的状态信息中的至少任一者,来获取与驾驶主体的特性有关的特性信息。另外,在预测手段中,借由使用识别信息及状态信息、以及该驾驶主体的特性信息,可以在恰当地掌握正在驾驶的驾驶主体的驾驶能力、以及其特性的基础上,预测由该驾驶主体驾驶的移动体的将来的举动,所以,可以预测可能波及预测对象的各种风险。由此,根据本发明,可以进一步提高交通的安全性、便利性及顺畅性。
22、(5)在本发明的交通安全辅助系统中,识别手段获取与包括对象交通区域中的各交通参与者及该对象交通区域中的各交通参与者的交通环境在内的识别对象有关的识别信息。另外,在预测手段中,借由使用这种识别信息,可以在恰当地掌握各交通参与者的周围的交通环境的基础上,对预测对象的将来进行预测,所以,可以预测可能波及预测对象的各种风险。由此,根据本发明,可以进一步提高交通的安全性、便利性及顺畅性。
23、(6)在本发明的交通安全辅助系统中,预测手段借由计算机来构筑模拟了对象交通区域的虚拟空间,并且借由进行该虚拟空间上的基于识别信息及状态信息的模拟实验,对预测对象的将来进行预测。由此,在预测手段中,借由在再现对象交通区域中的各交通参与者及其周围的交通环境的基础上,俯瞰监视在该对象交通区域中可能出现的事情现象,可以预测可能波及预测对象的各种风险。由此,根据本发明,可以进一步提高交通的安全性、便利性及顺畅性。
24、(7)在本发明的交通安全辅助系统中,行为推定手段将包含识别信息及状态信息之中的至少识别信息的第一输入、与预先制定的多个驾驶主体的模式行为中的至少一者建立关联,模拟器借由在虚拟空间上进行基于由行为推定手段建立关联的模式行为的模拟实验,对预测对象的将来进行预测。在本发明中,借由将移动体的驾驶主体将来可能采取的行为预先制定为模式行为,在预测手段中可以迅速地对预测对象的将来进行预测,所以,还可以快速地通知基于该预测手段的预测结果的辅助信息,进而可以确保各交通参与者采取用于避免将来可能出现的风险的行动的时间。由此,根据本发明,可以进一步提高交通的安全性、便利性及顺畅性。
25、(8)在本发明的交通安全辅助系统中,行为推定手段包括:驾驶能力推定手段,基于至少包含识别信息的第一输入,针对每个能力要素来推定驾驶主体的驾驶能力的下降;及,关联建立手段,将由该驾驶能力推定手段推定为下降的能力要素、与预先制定的多个模式行为中的至少一者建立关联。由此,在关联建立手段中,可以根据第一输入快速地决定模式行为,所以,可以如上所述进一步确保各交通参与者采取用于避免将来可能出现的风险的行动的时间。由此,根据本发明,可以进一步提高交通的安全性、便利性及顺畅性。
26、(9)在本发明的交通安全辅助系统中,驾驶能力推定手段在将驾驶主体为了恰当地驾驶移动体而应具备的驾驶能力分为认知能力、预测能力、判断能力及操作能力至少四个能力要素的基础上,针对这四个能力要素分别来推定驾驶主体的驾驶能力的下降。由此,在行为推定手段中,可以快速地决定与各能力要素的下降相应的恰当的模式行为,所以,可以如上所述进一步确保各交通参与者采取用于避免将来可能出现的风险的行动的时间。由此,根据本发明,可以进一步提高交通的安全性、便利性及顺畅性。
27、(10)在对象交通区域中实际上存在三者以上的多个交通参与者时,如果将这些所有的交通参与者作为预测对象,对上述那样的可能连锁发生的风险进行评价,则对预测手段施加的负荷有可能变大。相对于此,在本发明的交通安全辅助系统中,高风险交通参与者确定手段从由识别手段识别到的多个交通参与者中,将被推定将来采取规定的连锁风险诱发行动的可能性高的交通参与者,确定为高风险交通参与者,预测对象决定手段将该高风险交通参与者作为第一交通参与者,将从该第一交通参与者的周围存在的多个交通参与者中提取的两者决定为第二及第三交通参与者。如此,在预测手段中,借由将高风险交通参与者及其周围的交通参与者锁定为预测对象,可以减轻预测手段中的负荷,所以,可以快速地对预测对象的将来进行预测,进而可以确保各交通参与者采取用于避免将来可能出现的风险的行动的时间。由此,根据本发明,可以进一步提高交通的安全性、便利性及顺畅性。
28、(11)根据本发明的交通安全辅助方法,由于与(1)的发明相同的原因,可以提高交通的安全性、便利性及顺畅性。
本文地址:https://www.jishuxx.com/zhuanli/20240731/188614.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。