一种手持ERCP手术插管导丝辅助驱动装置及方法与流程
- 国知局
- 2024-08-05 11:45:26
本专利涉及医疗辅助器械领域,尤其是一种手持ercp( endoscopic retrogradecholangiopancreatography 内镜逆行性胰胆管造影术)手术插管导丝辅助驱动装置。
背景技术:
1、内镜逆行性胰胆管造影术(ercp)是一项重要的胆胰系统疾病诊疗技术,在诊断、治疗胆管和胰腺相关疾病时具有独特的微创治疗优势,现今已普及为诊治胰胆管良恶性疾病的重要手段。在ercp手术中,导丝辅助插管是决定手术成败的核心环节,只有通过反复尝试,在导丝进入胆突道(或胰管)后才能完成后续手术步骤,在整个手术过程中导丝发挥着支撑、引导、标记解剖位置的重要作用,其作用贯穿整个手术过程。
2、在ercp导丝辅助插管操作时,尤其是初中级医护人员操作时,送丝力度难以控制,往往因为操作不当造成十二指肠乳头水肿、充血,甚至出现穿孔、术后胰腺炎等严重并发症,增加了手术风险和患者的经济负担。
3、ercp导丝辅助插管是决定该手术成败的关键核心环节,插管失败的原因较多,如操作者经验不足、困难胆道入路或十二指肠乳头形态因素等等。甚至有研究表明,ercp学员在进行原始乳头导丝辅助插管操作时,成功率仅有54.4%。而即使成功的胆管插管,通常也无法一次成功,需要操作者根据自身经验不断调整导丝的角度和力度进行反复尝试。而过长的操作时间或过多的操作次数会导致十二指肠乳头水肿、出血,进而增加了插管的难度,甚至造成插管失败而只能考虑水肿消退后的再次择期手术或选择外科有创治疗,增加了患者的经济负担和治疗风险。
4、虽然ercp相比于开放手术具有创伤性小的优势,但与胃镜、肠镜等其他内镜检查相比较具有更高的术后并发症潜在风险,尤其是在困难插管的多次反复尝试过程及初中级手术人员插管操作过程中。ercp引起的并发症主要包括:术后出血、穿孔、胰腺炎、感染和心肺损伤等。其中,术后胰腺炎是最常见的并发症,发生率可达3-10%,在高风险人群中甚至可达15%;出血是ercp术后非常严重的一种并发症,发生率介于0.3-2%,最常见的原因是内镜下胆道和/或胰腺括约肌切开术的实施,目前尚无治疗这种特殊类型消化道出血的相关医学共识处置意见;而消化道穿孔则是ercp术后最严重的并发症,尽管发生率小于1%,但致死率很高。ercp术后并发症的发生,通常与手术操作存在较大关系,有明确报道,插管困难会显著增加ercp相关并发症发生风险,尤其是胰腺炎。困难插管增多、插管次数增加、导丝长时间反复抽送、暴力抽送,均会刺激胰管乳头括约肌,导致胰管括约肌开口出现损伤、水肿,进一步引发胰腺炎。
5、因此,在导丝辅助插管过程中如何减少导丝尝试次数、减轻对插管部位组织损伤以及增加插管成功率尤其是一次插管成功率,是减轻患者疼痛、减少并发症进而减轻患者经济负担的重要一环。
技术实现思路
1、本发明的目的是提供一种手持ercp手术插管导丝辅助驱动装置,以实现对ercp插管操作过程的辅助驱动,通过精准调节送丝力度、送丝方向、送丝速度,读取已送丝长度,帮助操作者尤其是初中级手术操作人员提高插管成功率、压缩插管时间并有效减少并发症发生具有极大的应用价值。
2、本发明的技术方案:一种手持ercp手术插管导丝辅助驱动装置,包括手持控制器及导丝控制器,其中手持控制器前端输出轴通过弹性联轴器与导丝控制器内的驱动轴连接。
3、所述导丝控制器包括导丝2、压丝环3、压丝柄4、压丝盒5、主板6、进出丝嘴7、导丝环8、扭矩传感器9、主动轮10、旋转编码器11、防护罩17,其中防护罩17内安装驱动轴,防护罩17一端与机架连接,机架内安装齿轮组,齿轮组的主动轮10与防护罩17内的驱动轴连接,主动轮10上方安装两个一级从动轮,一级从动轮上方安装二级从动轮,主动轮与一级从动轮齿轮咬合传动,一级从动轮与二级从动轮咬合,两个一级从动轮上安装导丝环8,通过轴连接,销键固定,两个二级从动轮上通过轴连接压丝环3,导丝环8与上方设有的压丝环3位置对应,两个压丝环3中间连接压丝柄4,压丝环3外侧罩有压丝盒5,压丝环3为外表面为圆柱平面,所述导丝环8有沟槽,导丝2通过两侧进出丝嘴7进出,导丝2置于导丝环8的沟槽内,位于压丝环3与导丝环8之间,通过按压压丝柄4,控制压丝环3压紧,主动轮驱动从动轮进行转动,从而使导丝前进后退。
4、所述导丝环8为两个,一个导丝环上连接扭矩传感器9,另一个导丝环8上安装旋转编码器11,机架侧面安装主板6,主板6上安装plc控制系统,扭矩传感器9与旋转编码器11通过线路与主板6连接,旋转编码器11为增量式编码器,旋转时将位移转换成周期性的电信号,电信号转变成计数脉冲,脉冲信号经主板6处理,可计算出驱动导丝前进的长度。扭矩传感器9与旋转编码器11为市场购买。
5、所述导丝环8有三个沟槽,适应不同直径的导丝。
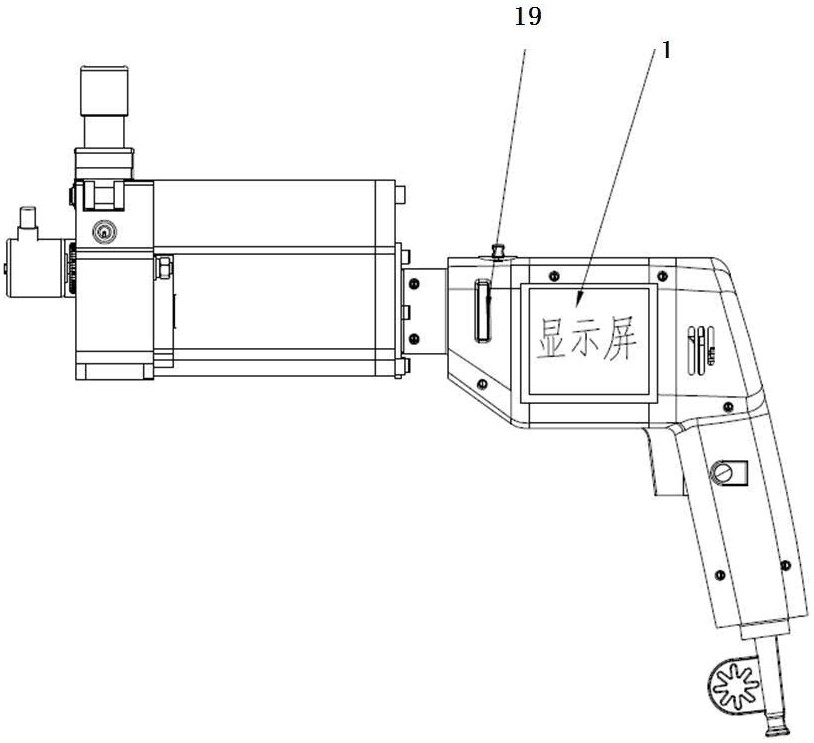
6、所述手持控制器包括外壳12、防弹出刷13、电机14、散热风扇15、二级齿轮16、带限速的按力控制开关18、换向开关19,其中外壳12内安装防弹出刷13、电机14、散热风扇15、二级齿轮16、带限速的按力控制开关18,显示屏1安装在外壳12上,线路连接主板6,二级齿轮16的从轮动与输出轴连接,二级齿轮16的主齿轮与电机14通过轴连接,在二级齿轮16与电机之间靠近电机一侧安装安装散热风扇15,二级齿轮16上安装换向开关19,通过换向开关19控制齿轮转向,从而控制主动轮10转向,实现导丝向前进或后退,电机另一侧安装防弹出刷13,防弹出刷13转子线圈在电机上,防弹出刷13安装在带限速的按力控制开关18的上面,带限速的按力控制开关18固定在手持控制器手柄位置,带限速的按力控制开关18的开关信号、电机14与主板6通过线路连接。伺服电机也可以通过主板6控制启停,正反转。
7、一种手持ercp手术插管导丝辅助驱动装置使用方法:
8、步骤1、启动并测试电机正常运转,控制前进后退换向开关19,按动至前进开关,插入导丝至进出丝嘴内备用。
9、步骤2、导丝灌装,按压调节带限速的按力控制开关18,调节电机转速,通过显示屏1查看导丝进入灌装过程。
10、步骤3、辅助插管,每次按压调节带限速的按力控制开关18,导丝前进1cm,若阻力大于或等于40gf,主板6内plc控制系统设定阻力大于或等于40gf时,电机停止或反转,如果设定反转,则导丝自动退回1cm至原位,术者需调整导管的方向;若电机设定停止,则导丝停止前进,术者需调整导管的方向或按动换向开关19,手动后退,若阻力小于40gf,则持续按压按力控制开关18,导丝进入管内,按压按力控制开关18,射线下监视导丝于胆管或胰管内的走形方向,并通过显示屏1观察导丝走行深度。
11、步骤4、观察导丝,插管成功则结束,若没有成功,则再次调整导丝方向,跳转步骤3。
12、工作时,操作者手持控制器下部,控制前进后退换向开关19,按动至前进开关,手指按住带限速的按力控制开关18,开关信号开启,主板6控制电机14启动,电机转动,带动散热风扇15及二级齿轮16转动,二级齿轮16转动,主动轮10转动,带动导丝环8旋转,附在导丝环8上的导丝2运动,利用压丝柄4调节压丝环3与导丝环8的距离,压丝环3压住导丝不让导丝偏移,给导丝一定压力,与导丝环8配合使用,达到驱动导丝前进和后退的效果。主板6与显示屏1、扭矩传感器9、旋转编码器11相连接,处理扭矩传感器9和旋转编码器11的电信号,通过显示屏1显示导丝的速度及力度。导丝环8上的扭矩传感器9会限制驱动导丝前进及后退的最大扭矩,设定扭矩传感器9的力矩,通过调节带限速的按力控制开关18控制速度,经显示屏1确认参数,借助显示屏1显示的驱动导丝长度和医疗可视设备,即可完成导丝灌装。
13、本发明的有益技术效果:目前在ercp手术领域,插管辅助操作装置方面尚处于空白状态,本装置通过对送丝力度、方向、速度等要素的精准调控,从而实现对ercp插管操作过程的辅助驱动,填补行业空白。
14、可有效降低人工强度,减轻因人员疲劳导致的效率下降、失误增加等影响手术疗效的外在因素,辅助操作者尤其是初中级医护人员降低工作负荷、提高插管成功率、压缩插管时间,进而减少患者创伤确保手术疗效。
15、可减少并发症发生率,人工操作时送丝力度、长度难以精准把控,乳头及肠壁极易出现出血、水肿等损伤,且人员个体经验差别及操作习惯的不同也潜在影响着插管的成功率。而在解剖结构异常、乳头病变等困难插管情况下,操作难度及风险更是显著增加。此时,导丝的精准调控成为手术成功的重要影响因素,本装置通过精准、量化调控导丝运动的参数,有效提高手术成功率。
本文地址:https://www.jishuxx.com/zhuanli/20240802/259241.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。