用于物体的形状选择性通道的门系统的制作方法
- 国知局
- 2024-08-05 12:15:40
本发明涉及一种门系统,其能够识别物体(例如汽车)的形状,并产生适于物体形状的通道开口。
背景技术:
1、为了进入或离开诸如建筑物或设施之类的保安区域,通常提供单个门杆形式的屏障,其仅阻碍简单的穿过。然而,这样的门杆可以容易地被许多不太大而能穿过的物体穿过。例如,对于人来说,通过爬过所述屏障可以容易地侵入这种门杆。为了进一步防止进入锁定的建筑物或设施,诸如车库门之类的门系统是有帮助的,因为仅当门打开时才容易侵入。
2、然而,门系统被配置成打开一个比要穿过的物体大得多的大空间。此外,通常这样的系统保持打开相当长的一段时间,以给予车辆驾驶员足够的时间来驾驶通过开口。在这种情况下,当车辆已经通过建筑物中的打开的门时,罪犯在汽车后部阴影中通过大门或门容易进入区域。在侵入到隐蔽区域之后,例如在私人环境中,入侵者可以容易地抢劫本应该由门系统保护的汽车驾驶员。
3、在cn209543444u中,示出了一种门系统,该门系统应该适应汽车的宽度,以使车辆和墙壁之间的间隙最小化。然而,该系统仍依赖于门杆,并且可以容易地侵入,如上所述。在us9689189b1中公开了一种通道区域,其可以由伸缩杆关闭。这种系统没有表现出使这些伸缩杆适应所通过的物体的形状的任何能力。它仅仅完全打开或关闭通道区域。在cn108978380中,公开了一种用于防止红灯在城市交通中行驶的门系统。此外,这种系统不被配置为适应通过的物体的形状。
4、因此,本发明的目的是提供一种门系统,其使入侵者进入由门系统保护的区域的可能性最小化。
技术实现思路
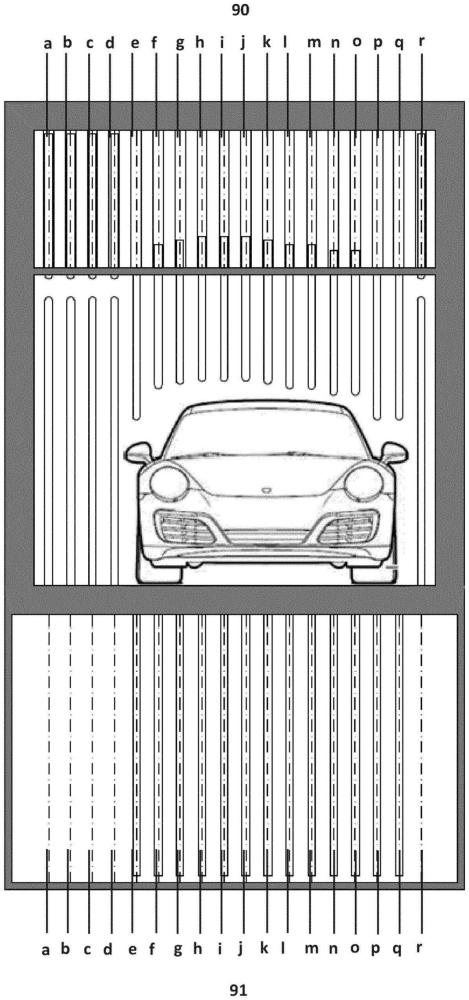
1、因此,本发明涉及一种用于通过通道区域进入和离开建筑物或设施的门系统,该门系统包括在通道区域处在不允许通过的第一位置的多个可移动装置,其特征在于,所述装置能够采用第二位置,以通过使第二位置适应与通过的物体的形状相对应的距离达到预定值而在不接触物体的情况下打开门,该预定值优选为最小值。
2、利用这样的系统,仅产生最小通道开口,其允许打算通过的物体通过,但是几乎没有额外的空间为入侵者打开。此外,该系统被配置为在物体通过之后快速关闭,以最小化侵入的可能性。该系统被配置并适于产生仅粗略地类似于通过的物体的形状的开口。由此,该系统被配置成在宽度和高度上对应于通过的物体来成形开口。传感器被配置为检测轿厢的形状,并且对应于可移动装置采用第二位置而不接触通过的物体(与通过的物体具有距离)的形状,其中除了可移动物体与通过的物体之间的预定的、优选最小的距离之外,第一位置和第二位置之间的差异与通过的物体的形状有关,特别是在宽度和高度方面。因此,开口小于由底部、天花板、左侧和右侧提供的总通道面积。因此,如本文所述的系统不同于完全关闭或打开通道区域的现有系统。因此,如本文所述的系统能够在高度和宽度方面提供对通过的物体的适应性。如本文所述的可移动装置的第一位置是最深入通过区域并且应该防止物体通过的位置。
3、通道区域处的可移动装置可以以不同的方式实施,例如扇形件、杆、板、折叠格栅、气垫或柔性但实心的帘幕。作为根据本发明的门系统的一部分的这种装置可以特别地构造成用于机动车辆(特别是汽车和摩托车)的通过。然而,门系统也可以用于人类或动物。在某些实施例中,可移动装置由杆或板形成,特别是由具有子板的分隔板形成。通过沿着板的宽度被分成子板,这些板可以被配置成在调节它们的朝向通过的物体的长度方面是灵活的。在本发明的含义中的板还可以意指板(也是具有子板的形式)通过使较小的板通过连接装置(诸如铰链、螺栓等)连接而在纵向方向上是柔性的。本发明含义中的板在纵向方向上具有柔性。板还可以具有未被分割或在纵向方向上具有柔性的实心板的普通含义。在某些实施例中,可以选择两种不同种类的可移动装置用于门系统。杆或板可以用于来自侧面的可移动装置以及用于来自天花板或底部的不同类型的装置。一个实施例可以包括来自天花板的卷帘式遮板,其为柔性的板和杆或板的形式,以及来自侧面的子板。
4、如本文所定义的门系统依赖于传感器的使用,该传感器能够识别要通过的物体的形状并将数据传输到可移动装置,以使它们的位置适应到物体的预定距离,优选最小距离以允许通过。这种传感器可以直接位于可移动装置上,但也可以单独或与可移动装置上的传感器组合地位于通道区域中。
5、可移动装置可以位于四个可能的侧面(即底部、天花板、左侧和右侧)中的每一个上。在通道区域以某种方式是圆形的或者不具有通常四个侧面的形状(例如拱形)的情况下,则可移动装置可以至少在面向车辆的两侧和天花板区域的那些区段处整合到通道的构造中。在一个实施例中,可移动装置安装在三侧,优选天花板、左侧和右侧。在另一个实施例中,可移动装置仅位于两侧,即左侧和右侧。在另一个实施例中,可移动装置仅位于天花板处。如果装置位于天花板或侧面,则可以提供能够使开口的高度适应于要通过的物体的高度的系统。这对于从天花板和底部提供可移动装置的系统也是如此,这是另一个可想到的实施例。仅从底部提供装置的系统不能提供高度控制,因为需要产生用于通道的开口,以几乎完全移除或退回底部装置,从而使天花板区域完全自由。因此,本发明的门系统提供了高度适应和最小化要通过的物体上方的空间的优点。
6、如上所述,可移动装置应该与通过的物体保持预定的、优选最小的距离。特别地,装置以这样的方式布置在第二位置,使得人或更大的物体不能侵入可移动装置和要通过的物体之间。在一个实施例中,要通过的物体与可移动装置的尖端之间的距离仅为几厘米,特别是小于20cm,优选小于10cm,最优选小于5cm。该系统还被配置和适配成将可移动装置设置成与通过的物体的形状相对应的距离。因此,根据可移动装置,可移动装置的端部不形成一条平行于通道区域的边界的直线,而是形成一条类似于通过的物体的横截面形状的线。本领域技术人员将理解,可移动装置不能以最小的细节类似于通过的物体的横截面,而是以由距可移动装置的预定距离给出的粗略装置类似于通过的物体的横截面。
7、此外,当可移动装置处于第一位置时,门系统应该防止人的大小或更大的物体通过。根据装置的性质,装置之间的空间不应允许困住通过开口的头部。在杆用作可移动装置的情况下,杆之间的距离小于20cm,优选小于10cm。优选地,杆的密度为8巴/米,更优选10巴/米,最优选大于12巴/米。
8、门系统还可以包括用于远程激活门系统的发送和接收单元。这种单元可以被配置为遥控器。实现门系统的自动打开的不同方式可以通过记忆功能来实现,该记忆功能能够记住先前通过的物体形状并根据先前通过的物体的形状调整杆的第二位置。这样的功能可以由车牌识别工具支持。
9、在本发明的一个实施例中,可移动装置是安装到或整合到通道区域的至少两侧中的杆。还可以想到的是,使这些杆仅仅位于天花板处。
10、如上所述,如本文所定义的门系统依赖于使用能够识别要通过的物体的形状并将数据传输到可移动装置的传感器,以使它们的位置适应到物体的最小距离以允许通过。在一个实施例中,每个可移动装置,例如每个杆或板,在最靠近要通过的物体的尖端区域处具有至少一个距离传感器,用于测量到通过的物体的距离。还可以是,诸如杆或板的可移动装置不承载距离传感器,并且在不同的位置处进行距离感测。在距离传感器位于最靠近要通过的物体的可移动装置的尖端区域处的情况下,距离传感器可以被配置用于测量装置的延伸方向上的距离。这尤其适用于将杆或可偏转板用作可移动装置的实施例。距离传感器也可以位于尖端区域处,指向偏离杆的延伸方向的通过的物体。还可以是,距离传感器位于指向通过的物体的尖端区域处,并且在杆的延伸方向上和在偏离杆的延伸方向的方向上进行测量。
11、在一个实施例中,可移动装置被配置为伸缩杆。伸缩杆的优点在于,它们可以用于覆盖进入通道区域的长距离,但是在侧壁或天花板内仅需要很少的空间或不需要空间来安装它们。因此,使用伸缩杆作为可移动装置是优选的,因为在通道区域及其周围的结构中仅需要提供最小的空间。
12、位于相同侧壁或天花板处的杆,特别是伸缩杆,彼此平行布置。所述杆之间的距离可以以这样的方式调整,使得当所述杆处于所述第一位置时,不可能通过,特别是不可能侵入。
13、如上所述,传感器可以位于可移动装置上,但是也可以单独地或与可移动装置上的传感器组合地位于通道区域中。在如本文所定义的门系统的一个实施例中,该系统还包括距离传感器,该距离传感器在物体通过的方向上在可移动装置(例如杆,并且优选地伸缩杆或可偏转板)之前和之后,预先评估要通过的物体的尺寸,以触发装置移动到第二位置。在一个实施例中,这些距离传感器,优选地多个传感器,作为组件整合到一个平面中的侧壁和天花板中,以评估从三侧通过的物体的形状。因此,可以在宽度和高度上扫描物体的形状,并且便于开口适应物体的形状。还可以在平行于可移动装置的平面的不止一个平面中安装不止一个传感器组件。以这种方式,可以测量三维形状,并且可移动装置可以相应地适应于通过的物体。
14、该系统可以以这样的方式工作:当物体接近通道区域时,系统被激活。物体将进入带有距离测量传感器的平面。物体的尺寸将被传递到门系统,并且开口将适应于物体的形状,因为可移动装置根据物体的形状适应第二位置。可移动装置处的可选传感器可以帮助保持装置到物体的距离。一旦物体已经通过通道区域,可移动装置就返回到第一位置,并且通道区域再次关闭。在通过期间,第二位置将通过可移动装置上的传感器中的任一个或通过在通道区域之前和可选地还在通过区域之后的传感器提供的信息来适应物体的形状。
15、如本文所述的系统可以以这样的方式构造,使得侧面(宽度)控制和高度控制的方案在通过方向上彼此间隔开,因此垂直于通过区域的平面。可以是首先通过高度控制,然后在其后通过侧面控制,或者相反。这两个方案之间的距离不应大到足以允许侵入。可以想到,两种方案在第一位置形成通道区域的完全封闭,然后采用第二位置以允许通过的物体通过。因此,提供了高度的安全性,因为可以在通道区域中提供两个完整且关闭的门。在一个实施例中,高度控制可以首先通过整合在天花板中的可移动装置来提供。这种可移动装置也可以与普通的车库门系统组合,如普通门或可滚动帘,只要这些系统能够使它们的位置对应于通过的物体的高度。在用于高度控制的可移动装置之前或之后,提供用于侧面控制的可移动装置。这些可移动装置可以从左侧和右侧设置,或者从底部设置,或者从左侧和右侧以及底部设置。可从底部移动的装置还可以配备有可转动或枢转的子装置,该子装置能够使侧向距离适应通过的物体。这种子装置也可以整合到在上侧使用的可移动装置中,也适应通过的物体的高度。
16、如上所述的系统被配置为静止的并且整合到构造中。然而,系统还可以被配置为从通过的物体前面的起始位置移动到通过的物体后面的结束位置。在这种系统中,包括可移动装置的通道区域绕过在系统绕过时不移动的物体。
本文地址:https://www.jishuxx.com/zhuanli/20240802/261835.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表