一种往复式宏微驱动装置
- 国知局
- 2024-08-05 12:16:58
本发明属于精密驱动,具体涉及一种往复式宏微驱动装置。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、宏微运动装置在精密运动控制领域是一种常见的运动装置,宏微运动装置通常由宏动部分和微动部分组成,宏动部分主要用于大行程运动,微动部分主要用于小行程精密定位。宏动部分的执行器件一般选用电动推杆、音圈电机、压电螺钉等,这些执行器件具有行程大但是驱动力较小的特点。微动部分的执行器件一般选用压电陶瓷等,压电陶瓷具有行程小但是驱动力很大的特点。在宏微运动中,需要将宏动的执行器件和微动的执行器件布置在一起,并且要使两者始终接触在一起。现在的做法是在宏动执行器和微动执行器之间直接加装一个压缩弹簧,在运动过程中,宏动执行器运动也需要克服弹簧力才能实现运动,这就使得宏微运动装置的有效输出力大大减小;(参见论文:development andapplications of a two-dimensional tip-tilting stage system with nanoradian-level positioning resolution;advanced photon source,argonne nationallaboratory,argonne,il 60439,usa);宏微运动装置的有效输出力决定了整体的驱动能力以及稳定性能,对精密运动控制有着重要影响。因此,如何宏微运动装置的有效输出力是亟须解决的问题。
技术实现思路
1、本发明为了解决上述问题,本发明公开了一种往复式宏微驱动装置。
2、根据一些实施例,本发明采用如下技术方案:
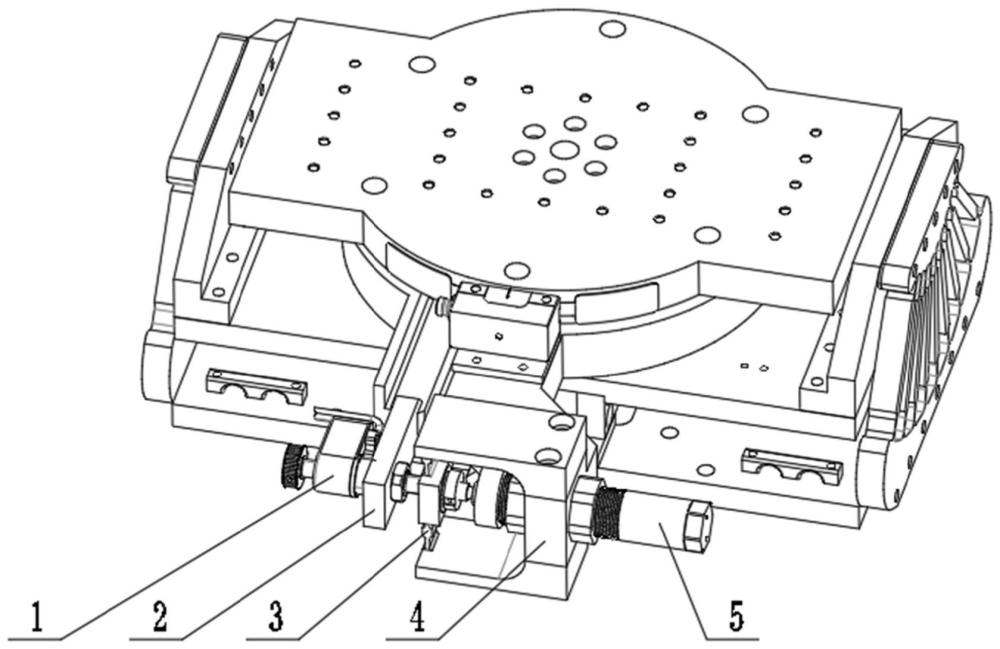
3、一种往复式宏微驱动装置,包括:宏动执行器、微动执行器和弹性铰链,宏动执行器的壳体设置在运动输出装置上,微动执行器的壳体设置在基座上,宏动执行器和微动执行器的运动输出杆在末端相互接触,弹性铰链设置在基座和宏动执行器的运动输出杆之间,弹性铰链将宏动执行器的运动输出杆与微动执行器的运动输出杆的末端弹性固定在一起,宏动执行器的运动输出杆与弹性铰链在接触处轴向上的位置保持恒定。
4、作为进一步的技术方案,所述的宏动执行器为电动推杆、音圈电机或压电螺钉。
5、作为进一步的技术方案,所述的电动推杆或音圈电机的运动输出杆与弹性铰链直接固连。
6、作为进一步的技术方案,所述的宏动执行器为压电螺钉时,其包括外壳、运动输出杆、锁紧座,外壳固定在运动输出装置上,运动输出杆与外壳螺纹连接,运动输出杆旋转,带动外壳相对于基座作直线运动,运动输出杆上设置锁紧座,锁紧座可固定运动输出杆与弹性铰链之间沿轴向方向的位置,运动输出杆和锁紧座同时转动。
7、作为进一步的技术方案,宏动执行器的运动输出杆末端设置球头。
8、作为进一步的技术方案,微动执行器的运动输出杆的末端设置球头。
9、作为进一步的技术方案,所述的弹性铰链和锁紧座之间设置有推力轴承。
10、作为进一步的技术方案,推力轴承和弹性铰链之间设置有半球头,半球头上设有轴承座,轴承座用于安装所述的推力轴承。
11、作为进一步的技术方案,所述的弹性铰链包括对称布置的固定支架、柔性铰链、对接座,固定支架与基座固定连接,用于固定整个弹性铰链,柔性铰链对称设置在对接座与固定支架之间,使得对接座与固定支架之间形成一个“弓形”柔性弹簧机构;对接座上设有球窝,球窝与半球头匹配,形成球轴承连接。
12、作为进一步的技术方案,所述的球窝上表面低于半球头的上表面。
13、与现有技术相比,本发明的有益效果为:
14、宏微运动的实现需要宏动执行器和微动执行器的运动输出部分始终接触在一起,现有技术是在运动输出装置与基座之间加装一个压紧弹簧,但是,在运动输出装置向着弹簧力反方向运动时,需要宏动执行器和微动执行器先克服弹簧力,即,宏动执行器或微动执行器的输出力减去弹簧力才是运动输出装置最终的有效输出力,一般情况下,宏动执行器的输出力较小,这就使得整个装置的有效输出力变得很小。
15、而本发明提供了一种往复式宏微驱动装置,使用弹性铰链将宏动执行器的运动输出杆与微动执行器的运动输出杆的末端弹性固定在一起,弹簧力主要对微动执行器的输出力产生影响,而微动执行器的输出力较大,这样就可以充分发挥微动执行器大推力以及宏动执行器大行程小推力的特点,可以有效增加宏微运动装置的有效输出力,增加了精密运动控制装置整体的驱动能力以及稳定性能。
16、本往复式宏微驱动装置,整体结构简单,工作过程简洁,便于实现,可靠性高。
技术特征:1.一种往复式宏微驱动装置,其特征在于,包括:宏动执行器、微动执行器和弹性铰链,宏动执行器的壳体设置在运动输出装置上,微动执行器的壳体设置在基座上,宏动执行器和微动执行器的运动输出杆在末端相互接触,弹性铰链设置在基座和宏动执行器的运动输出杆之间,弹性铰链将宏动执行器的运动输出杆与微动执行器的运动输出杆的末端弹性固定在一起,宏动执行器的运动输出杆与弹性铰链在接触处轴向上的位置保持恒定。
2.如权利要求1所述的往复式宏微驱动装置,其特征在于,所述的宏动执行器为电动推杆、音圈电机或压电螺钉。
3.如权利要求2所述的往复式宏微驱动装置,其特征在于,所述的电动推杆或音圈电机的运动输出杆与弹性铰链直接固连。
4.如权利要求1所述的往复式宏微驱动装置,其特征在于,所述的宏动执行器为压电螺钉时,其包括外壳、运动输出杆、锁紧座,外壳固定在运动输出装置上,运动输出杆与外壳螺纹连接,运动输出杆旋转,带动外壳相对于基座作直线运动,运动输出杆上设置锁紧座,锁紧座可固定运动输出杆与弹性铰链之间沿轴向方向的位置,运动输出杆和锁紧座同时转动。
5.如权利要求4所述的往复式宏微驱动装置,其特征在于,宏动执行器的运动输出杆末端设置球头。
6.如权利要求1所述的往复式宏微驱动装置,其特征在于,微动执行器的运动输出杆的末端设置球头。
7.如权利要求1所述的往复式宏微驱动装置,其特征在于,所述的弹性铰链和锁紧座之间设置有推力轴承。
8.如权利要求7所述的往复式宏微驱动装置,其特征在于,推力轴承和弹性铰链之间设置有半球头,半球头上设有轴承座,轴承座用于安装所述的推力轴承。
9.如权利要求8所述的往复式宏微驱动装置,其特征在于,所述的弹性铰链包括对称布置的固定支架、柔性铰链、对接座,固定支架与基座固定连接,用于固定整个弹性铰链,柔性铰链对称设置在对接座与固定支架之间,使得对接座与固定支架之间形成一个“弓形”柔性弹簧机构;对接座上设有球窝,球窝与半球头匹配,形成球轴承连接。
10.如权利要求9所述的往复式宏微驱动装置,其特征在于,所述的球窝上表面低于半球头的上表面。
技术总结本发明公开了一种往复式宏微驱动装置,包括:宏动执行器和微动执行器,宏动执行器的壳体设置在运动输出装置上,微动执行器的壳体设置在基座上,宏动执行器和微动执行器的运动输出杆在末端相互接触,弹性铰链设置在基座和宏动执行器的运动输出杆之间,弹性铰链将宏动执行器的运动输出杆与微动执行器的运动输出杆的末端弹性固定在一起,宏动执行器的运动输出杆与弹性铰链在接触处轴向上的位置保持恒定。技术研发人员:闫鹏,江文渊,孟令臣,于海洋受保护的技术使用者:山东大学技术研发日:技术公布日:2024/8/1本文地址:https://www.jishuxx.com/zhuanli/20240802/261936.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表