一种微重力环境工效评估方法、装置、计算机设备和介质
- 国知局
- 2024-08-05 12:18:12
本技术涉及计算机,特别是涉及一种微重力环境工效评估方法、装置、计算机设备和存储介质。
背景技术:
1、在空间站长期有人驻留时代,航天员需要长期在太空微重力环境中执行各种的任务,因此,航天员工作状态是否舒适,不仅对航天员的身心健康,而且对任务的顺利完成都有很大影响。人体三维重建是近年来计算机视觉中的热点方向之一,在这一方向上的各种研究成果如smpl在许多工业领域取得了广泛应用价值。人类工效学(或人因工程学)是近年来一门新兴的交叉学科,其研究的目的就在于使人工作得更高效、安全、舒适。
2、常用的三种通过观察人体姿势进行工效评估的方法有快速上肢评估(repidupper limb assessment,rula)、快速全身评估(repid entire body assessment,reba)和劳动姿势与负荷分析系统(owako working posture analysing system,owas)。然而,现有的工效评估方法如rula、reba,其设计时的出发点是针对地面重力环境下工作人员的姿态进行分析评估,而在微重力环境下,人体的运动学特性和生理学特性发生了显著变化,人体的舒适姿态如中性体位也发生了变化,以往的这些在地面重力环境常用的方法已经不再适合,如果将它们直接应用于微重力环境下的工效评估,会产生很大的评估误差。
3、其次,rula、reba等方法在评估方式上,采用的是各关节姿态在人体解剖学平面上的投影角,这样的评估方式虽然相对简单,节省在人体测量上花费的精力,但对于人体姿态的表达却不太精确,其原因有二,一是二维平面上的投影角有时候不能够完整表达人体的三维姿态,虽然对于肩关节、髋关节这样的多自由度关节,可以通过两个以上的平面上的投影角表示约束其三维坐标,但对于肘关节、膝关节这样的单自由度关节,由于其旋转轴并不总是垂直于人体的各个解剖学平面,此时只用一个投影角就无法确切地表达关节的旋转,而使用多个投影角又会产生表达冗余的问题,且增加了评估的复杂度。因此,现有技术存在适应性不佳的问题。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够更加准确表达关节旋转的微重力环境工效评估方法、装置、计算机设备和存储介质。
2、一种微重力环境工效评估方法,所述方法包括:
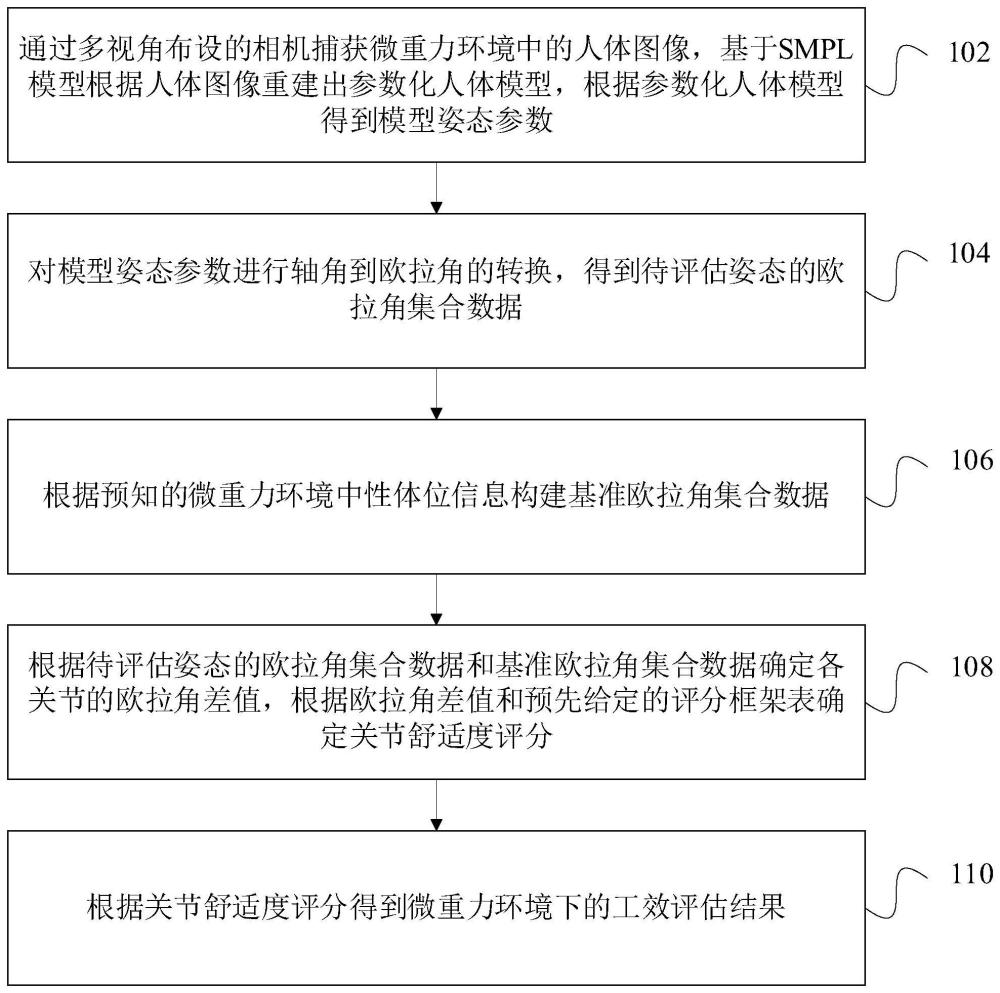
3、通过多视角布设的相机捕获微重力环境中的人体图像,基于smpl模型根据所述人体图像重建出参数化人体模型,根据所述参数化人体模型得到模型姿态参数;
4、对所述模型姿态参数进行轴角到欧拉角的转换,得到待评估姿态的欧拉角集合数据;所述待评估姿态的欧拉角集合数据能够表达当前人体姿态的关节旋转;
5、根据预知的微重力环境中性体位信息构建基准欧拉角集合数据;
6、根据所述待评估姿态的欧拉角集合数据和所述基准欧拉角集合数据确定各关节的欧拉角差值,根据所述欧拉角差值和预先给定的评分框架表确定关节舒适度评分;
7、根据所述关节舒适度评分得到微重力环境下的工效评估结果。
8、在其中一个实施例中,还包括:获取所述模型姿态参数;所述模型姿态参数为轴角数据;
9、根据所述轴角数据得到旋转矩阵;
10、将所述旋转矩阵转换为z-y-x顺序的内旋欧拉角,求解得到待评估姿态的欧拉角集合数据。
11、在其中一个实施例中,还包括:根据预知的微重力环境中性体位信息构建基准欧拉角集合数据;所述基准欧拉角集合数据由smpl模型默认姿态转换到微重力环境中性体位所需的各关节的欧拉角数据构成。
12、在其中一个实施例中,还包括:根据所述待评估姿态的欧拉角集合数据和所述基准欧拉角集合数据确定各关节的欧拉角差值;
13、根据所述欧拉角差值和预先给定的评分框架表确定关节各自由度的舒适度评分;
14、将所述关节各自由度的舒适度评分相加,得到关节舒适度评分;所述关节舒适度评分由包括:颈关节、腰椎、肩关节、肘关节、腕关节、髋关节、膝关节和踝关节。
15、在其中一个实施例中,还包括:根据所述关节舒适度评分得到身体各部位的舒适度评分;
16、根据所述身体各部位的舒适度评分得到总体姿势评分;
17、根据所述总体姿势评分确定姿势舒适度评级结果。
18、在其中一个实施例中,还包括:构建上肢评估表、颈部、躯干、下肢评估表;
19、根据所述关节舒适度评分通过查表确定身体各部位的舒适度评分。
20、在其中一个实施例中,还包括:基于smpl模型采用smplify-x的multiview扩展版本根据所述人体图像重建出参数化人体模型。
21、一种微重力环境工效评估装置,所述装置包括:
22、模型姿态参数确定模块,用于通过多视角布设的相机捕获微重力环境中的人体图像,基于smpl模型根据所述人体图像重建出参数化人体模型,根据所述参数化人体模型得到模型姿态参数;
23、欧拉角转换模块,用于对所述模型姿态参数进行轴角到欧拉角的转换,得到待评估姿态的欧拉角集合数据;所述待评估姿态的欧拉角集合数据能够表达当前人体姿态的关节旋转;
24、基准确定模块,用于根据预知的微重力环境中性体位信息构建基准欧拉角集合数据;
25、关节舒适度评分模块,用于根据所述待评估姿态的欧拉角集合数据和所述基准欧拉角集合数据确定各关节的欧拉角差值,根据所述欧拉角差值和预先给定的评分框架表确定关节舒适度评分;
26、工效评估模块,用于根据所述关节舒适度评分得到微重力环境下的工效评估结果。
27、一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
28、通过多视角布设的相机捕获微重力环境中的人体图像,基于smpl模型根据所述人体图像重建出参数化人体模型,根据所述参数化人体模型得到模型姿态参数;
29、对所述模型姿态参数进行轴角到欧拉角的转换,得到待评估姿态的欧拉角集合数据;所述待评估姿态的欧拉角集合数据能够表达当前人体姿态的关节旋转;
30、根据预知的微重力环境中性体位信息构建基准欧拉角集合数据;
31、根据所述待评估姿态的欧拉角集合数据和所述基准欧拉角集合数据确定各关节的欧拉角差值,根据所述欧拉角差值和预先给定的评分框架表确定关节舒适度评分;
32、根据所述关节舒适度评分得到微重力环境下的工效评估结果。
33、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
34、通过多视角布设的相机捕获微重力环境中的人体图像,基于smpl模型根据所述人体图像重建出参数化人体模型,根据所述参数化人体模型得到模型姿态参数;
35、对所述模型姿态参数进行轴角到欧拉角的转换,得到待评估姿态的欧拉角集合数据;所述待评估姿态的欧拉角集合数据能够表达当前人体姿态的关节旋转;
36、根据预知的微重力环境中性体位信息构建基准欧拉角集合数据;
37、根据所述待评估姿态的欧拉角集合数据和所述基准欧拉角集合数据确定各关节的欧拉角差值,根据所述欧拉角差值和预先给定的评分框架表确定关节舒适度评分;
38、根据所述关节舒适度评分得到微重力环境下的工效评估结果。
39、上述微重力环境工效评估方法、装置、计算机设备和存储介质,基于smpl模型根据人体图像重建出参数化人体模型,根据参数化人体模型得到模型姿态参数,对模型姿态参数进行轴角到欧拉角的转换,得到待评估姿态的欧拉角集合数据,计算其与基准欧拉角集合数据的差值,根据欧拉角差值和预先给定的评分框架表确定关节舒适度评分,根据关节舒适度评分得到微重力环境下的工效评估结果。本发明基于三维参数化模型重建人体姿态可以大大减小人体测量的成本,采用欧拉角进行工效评估表达关节运动更精确,同时具有较好的语义表征,能够与关节的各个自由度相对应。本发明方法能够适用于空间微重力环境下人体工作姿态的评估,可为保证和提高航天员在轨工作效率、舒适性以及航天设备系统结构及功能的人性化设计等方面提供依据,还可为未来空间站在轨人因研究提供参考。
本文地址:https://www.jishuxx.com/zhuanli/20240802/262048.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表