一种障碍物识别方法、系统、设备及计算机可读存储介质与流程
- 国知局
- 2024-08-05 12:20:40
本技术涉及记忆泊车,更具体地说,涉及一种障碍物识别方法、系统、设备及计算机可读存储介质。
背景技术:
1、在记忆泊车(home automated valet parking assist,havp)中,车辆穿行的空间或者路上存在障碍物,比如障碍物为不平整突起的路面、低小碎料等,这些障碍物不影响车辆通行,但是会被识别或者标注成重点关注障碍物或者不可通行障碍物,造成记忆泊车过程中车辆的非正常减速或停车,导致记忆泊车的用户体验性较差。
2、综上所述,如何提高记忆泊车的用户体验性是目前本领域技术人员亟待解决的问题。
技术实现思路
1、本技术的目的是提供一种障碍物识别方法、系统、设备及计算机可读存储介质,其能在一定程度上解决如何提高记忆泊车的用户体验性的技术问题。本技术还提供了一种障碍物识别系统、电子设备及计算机可读存储介质。
2、为了实现上述目的,本技术提供如下技术方案:
3、一种障碍物识别方法,包括:
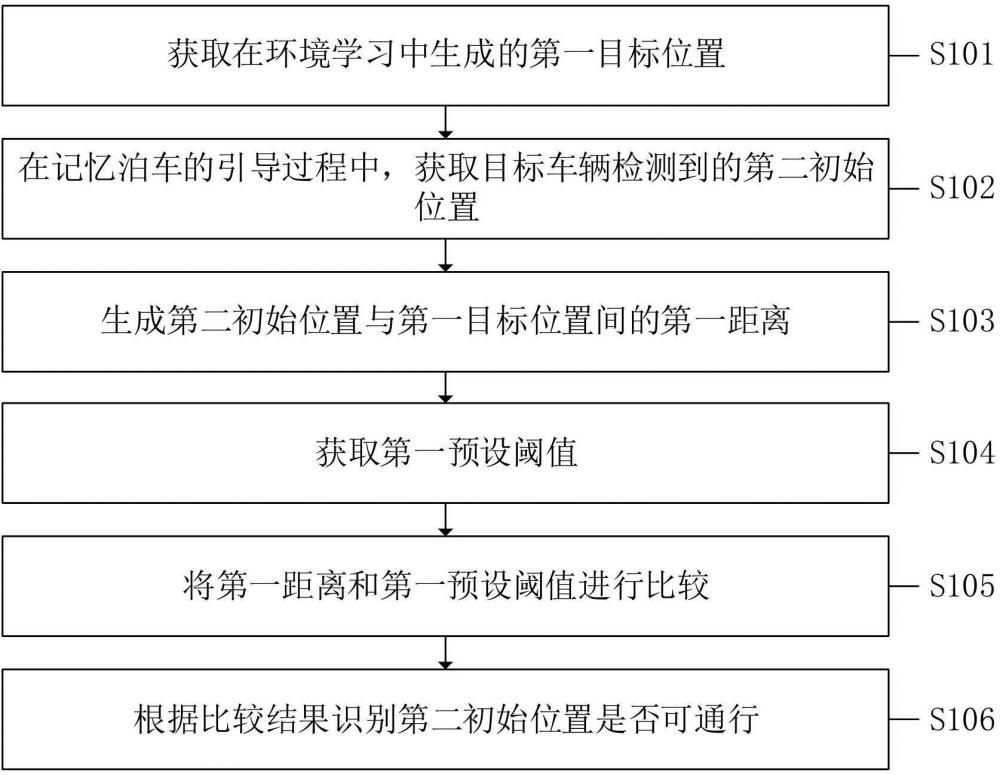
4、获取在环境学习中生成的第一目标位置;
5、在记忆泊车的引导过程中,获取目标车辆检测到的第二初始位置;
6、生成所述第二初始位置与所述第一目标位置间的第一距离;
7、获取第一预设阈值;
8、将所述第一距离和所述第一预设阈值进行比较;
9、根据比较结果识别所述第二初始位置是否可通行;
10、其中,环境学习用于对记忆泊车进行学习;所述第一目标位置包括可通行的第一障碍物的位置;所述第二初始位置包括第二障碍物的位置。
11、优选的,所述将所述第一距离和所述第一预设阈值进行比较,根据比较结果识别所述第二初始位置是否可通行,包括:
12、响应于所述第一距离小于所述第一预设阈值,则将所述第一距离确定为第一目标距离;
13、将所述第一目标距离对应的所述第二初始位置确定为初始可通行障碍物位置;
14、根据所述初始可通行障碍物位置识别目标可通行障碍物位置,以使所述目标车辆通行所述目标可通行障碍物位置。
15、优选的,所述根据所述初始可通行障碍物位置识别目标可通行障碍物位置,包括:
16、获取在环境学习过程中生成的第一目标图像;
17、获取所述第二障碍物在俯视图坐标系下的第二初始图像;
18、在所述第一目标图像中,确定出所述第一目标距离对应的第二目标图像;
19、在所述第二初始图像中,确定出所述第一目标距离对应的初始可通行障碍物图像;
20、检测所述初始可通行障碍物图像与所述第二目标图像是否匹配;
21、若匹配,则将所述初始可通行障碍物位置确定为所述目标可通行障碍物位置;
22、其中,所述第一目标图像为可通行的所述第一障碍物在所述俯视图坐标系下的图像。
23、优选的,所述检测所述初始可通行障碍物图像与所述第二目标图像是否匹配,包括:
24、通过均方误差生成模型,生成所述初始可通行障碍物图像与所述第二目标图像间的第一均方误差值;
25、沿横向和纵向的正负方向,将所述初始可通行障碍物图像分别移动目标数量个像素;
26、通过所述均方误差生成模型,生成移动后的所述初始可通行障碍物图像与所述第二目标图像间的第二均方误差值;
27、将所述第一均方误差值和所述第二均方误差值中的最小值确定为目标均方误差值;
28、响应于所述目标均方误差值小于等于第二预设阈值,则判定所述初始可通行障碍物图像与所述第二目标图像匹配;
29、响应于所述目标均方误差值大于所述第二预设阈值,则判定所述初始可通行障碍物图像与所述第二目标图像不匹配。
30、优选的,所述获取所述第二障碍物在俯视图坐标系下的第二初始图像,包括:
31、确定所述第二障碍物在所述俯视图坐标系下的第二位置;
32、获取在所述俯视图坐标系下拍摄的俯视图;
33、计算所述俯视图中各个像素点到所述第二位置的第二距离;
34、将值最小的所述第二距离确定为第二目标距离;
35、将所述第二目标路径对应的像素点确定为图像中心像素点;
36、获取设定的障碍物图像的规模数据;
37、根据所述图像中心像素点及所述规模数据确定所述第二初始图像。
38、优选的,所述获取在环境学习中生成的第一目标位置,包括:
39、在对记忆泊车进行环境学习的过程中,获取所述目标车辆检测到的第一障碍物的第一初始位置;
40、确定所述目标车辆在环境学习过程中的目标路径点;
41、确定所述第一初始位置与所述目标路径点间的第三距离;
42、将小于目标阈值的所述第三距离确定为第三目标距离;
43、将所述第三目标距离对应的所述第一初始位置确定为所述第一目标位置,以引导所述目标车辆在记忆泊车过程中通行所述第一目标位置;
44、其中,所述目标阈值根据所述目标车辆的宽度确定。
45、优选的,所述获取所述目标车辆检测到的第一障碍物的第一初始位置,包括:
46、获取所述目标车辆新检测到的第三障碍物的第三初始位置;
47、计算所述第三初始位置与每个已确定的所述第一初始位置间的第四距离;
48、对于每个所述第四距离,若所述第四距离大于第三预设阈值,则将所述第三障碍物确定为新的所述第一障碍物,将所述第三初始位置确定为新的所述第一初始位置;
49、对于每个所述第四距离,若所述第四距离小于等于所述第三预设阈值,则将所述第三障碍物更新为已确定的所述第一障碍物,将所述第三初始位置更新为已确定的所述第一初始位置。
50、一种障碍物识别系统,包括:
51、第一获取模块,用于获取在环境学习中生成的第一目标位置;
52、第二获取模块,用于在记忆泊车的引导过程中,获取目标车辆检测到的第二初始位置;
53、第一生成模块,用于生成所述第二初始位置与所述第一目标位置间的第一距离;
54、第三获取模块,用于获取第一预设阈值;
55、第一识别模块,用于将所述第一距离和所述第一预设阈值进行比较;根据比较结果识别所述第二初始位置是否可通行;
56、其中,环境学习用于对记忆泊车进行学习;所述第一目标位置包括可通行的第一障碍物的位置;所述第二初始位置包括第二障碍物的位置。
57、一种电子设备,包括:
58、存储器,用于存储计算机程序;
59、处理器,用于执行所述计算机程序时实现如上任一所述障碍物识别方法的步骤。
60、一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机程序,所述计算机程序被处理器执行时实现如上任一所述障碍物识别方法的步骤。
61、本技术提供的一种障碍物识别方法,获取在环境学习中生成的第一目标位置;在记忆泊车的引导过程中,获取目标车辆检测到的第二初始位置;生成第二初始位置与第一目标位置间的第一距离;获取第一预设阈值;将第一距离和第一预设阈值进行比较;根据比较结果识别第二初始位置是否可通行;其中,环境学习用于对记忆泊车进行学习;第一目标位置包括可通行的第一障碍物的位置;第二初始位置包括第二障碍物的位置。本技术中,第一目标位置记录了环境学习中可通行的第一障碍物的位置,如此一来,在记忆泊车的引导过程中,可以通过分析第二初始位置与第一目标位置间的第一距离,来分析第二初始位置是否可通行,可以避免目标车辆在记忆泊车过程中出现非正常减速或停车,可以提高记忆泊车的用户体验性。本技术提供的一种障碍物识别系统、电子设备及计算机可读存储介质也解决了相应技术问题。
本文地址:https://www.jishuxx.com/zhuanli/20240802/262288.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。