一种机动输油管线巡检无人机及其控制方法
- 国知局
- 2024-08-08 16:54:07
本发明涉及巡检无人机,尤其涉及一种机动输油管线巡检无人机及其控制方法。
背景技术:
1、机动输油管线采用装配式管线现场快速连接,地面铺设,具有铺设展开速度快、应急输油保障效率高、机动灵活方便等特点,广泛应用于抢险救灾、应急救援、备战打仗等场合。机动输油管线规模庞大,展开距离远,点多线长,运行维护管理要求高,尤其是管线采用地面裸露铺设,极易遭外部因素破坏。输油过程中不间断地对线路进行巡查巡检是及时发现管线遭受破坏、发生泄漏等意外事故的最为常用、也是最可靠的做法,对确保管线输油安全具有重要作用。传统的人工巡线作业动用人力多、劳动强度大,速度慢、效率低,发现问题不及时,受地形、天铁限制大。采用无人机巡检可以有效解决人工巡线存在的不足和缺陷。
2、现有公告号cn207364667u公开了一种无人机管线巡检系统,包括无人机体,无人机体内部置有控制芯片、卫星定位系统、通讯设备,无人机体前部置有测距摄像头,下部接有摄像机、热成像摄像机。主要通过无人机对埋地固定管道沿线进行巡检,利用回传的图片影像人工识别地表特征变化,发现管线漏油、被占压等情况,省时省力,效率高。
3、但是,上述无人机管线巡检系统结构简单,未对摄像机进行保护,而无人机飞行中环境各异,容易造成对摄像机的碰撞,损坏摄像机,影响巡检效果。
技术实现思路
1、本发明的目的在于提供一种机动输油管线巡检无人机及其控制方法,解决了上述无人机管线巡检系统结构简单,未对摄像机进行保护,而无人机飞行中环境各异,容易造成对摄像机的碰撞,损坏摄像机,影响巡检效果的问题。
2、为实现上述目的,本发明提供了一种机动输油管线巡检无人机,包括机体,还包括驱动组件和影像组件;
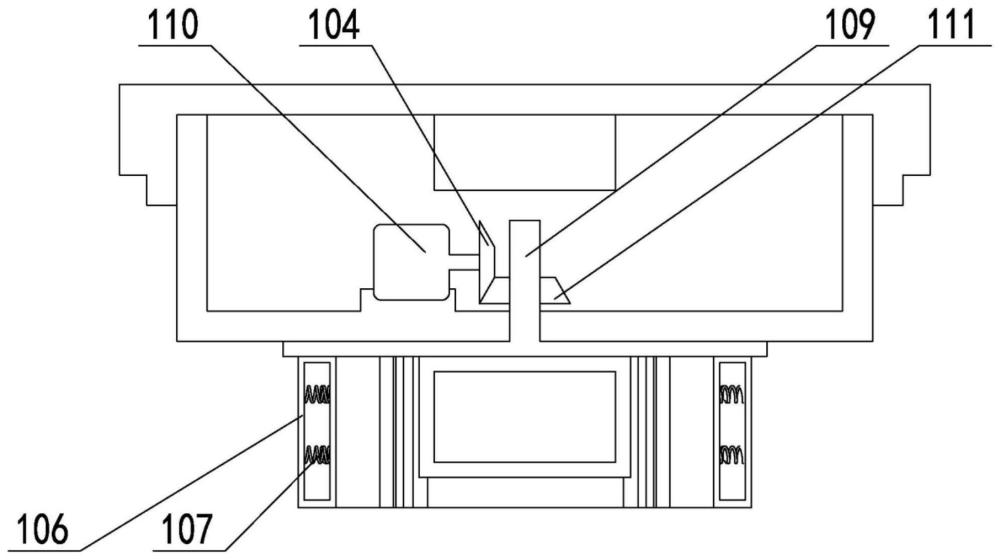
3、所述影像组件包括旋转台、安装台、动力构件、支架、缓冲气囊和缓冲弹簧,所述旋转台位于所述机体的底部,所述安装台与所述旋转台固定连接,并位于所述旋转台的底部,所述动力构件与所述旋转台连接,所述支架与所述旋转台固定连接,并位于所述旋转台的底部,所述缓冲气囊的数量为多个,多个所述缓冲气囊分别与所述支架固定连接,并分别位于所述安装台的周围,所述缓冲弹簧位于所述缓冲气囊的内部,所述驱动组件与所述机体连接。
4、其中,所述动力构件包括传感器、转动轴、动力电机和传动部件,所述传感器与所述安装台固定连接,并位于所述安装台的表壁;所述转动轴与所述旋转台固定连接,并与所述机体转动连接,且位于所述机体的内部;所述动力电机与所述机体拆卸连接,并位于所述机体的内部;所述传动部件与所述动力电机连接。
5、其中,所述传动部件包括第一齿轮和第二齿轮,所述第一齿轮与所述动力电机的输出端固定连接;所述第二齿轮与所述转动轴固定连接,并与所述第一齿轮啮合。
6、其中,所述驱动组件包括机臂、螺旋桨模块和控制构件,所述机臂的数量为六个,六个所述机臂分别与所述机体拆卸连接;六个所述机臂远离所述机体的一侧分别连接有所述螺旋桨模块;所述控制构件位于所述机体的内部。
7、其中,所述控制构件包括飞控模块和数据收发模块,所述飞控模块与所述螺旋桨模块连接;所述数据收发模块与所述飞控模块连接。
8、其中,所述控制构件还包括供电模块,所述供电模块分别与所述飞控模块、所述数据收发模块、所述动力电机和所述传感器连接。
9、其中,所述机动输油管线巡检无人机还包括任务载荷挂架,所述任务载荷挂架与所述机体拆卸连接,并位于所述机体的底部。
10、一种机动输油管线巡检无人机控制方法,包括以下步骤:
11、飞控模块接收地面指令,控制螺旋桨模块启动,带动机体飞行;
12、所述机体飞行过程中利用安装台内的摄像机进行拍摄;
13、拍摄数据和所述机体飞行数据通过数据收发模块传输于地面站。
14、本发明的一种机动输油管线巡检无人机及其控制方法,所述驱动组件带动所述机体飞行,所述旋转台由所述机体内部设置的所述动力构件驱动转动,所述安装台内部安装巡检拍摄所需的摄像机,所述支架设置在所述安装台的外侧,并连接有所述缓冲气囊,多个所述缓冲气囊包围在所述安装台的四周,并留有供摄像机拍摄的空间,多个所述缓冲气囊的内部均设置有多个所述缓冲弹簧,在所述机体飞行过程中,碰到障碍物时,所述动力构件首先驱动所述旋转台转动,带动摄像机的镜头远离障碍物,避免镜头碰撞损坏,同时,障碍物会优先触碰到所述缓冲气囊,利用气压进行缓冲,所述缓冲弹簧增强所述缓冲气囊的复弹力,促使缓冲效果更好,避免碰撞损坏,保障巡检效果。
技术特征:1.一种机动输油管线巡检无人机,包括机体,其特征在于,
2.如权利要求1所述的机动输油管线巡检无人机,其特征在于,
3.如权利要求2所述的机动输油管线巡检无人机,其特征在于,
4.如权利要求2所述的机动输油管线巡检无人机,其特征在于,
5.如权利要求4所述的机动输油管线巡检无人机,其特征在于,
6.如权利要求5所述的机动输油管线巡检无人机,其特征在于,
7.如权利要求1所述的机动输油管线巡检无人机,其特征在于,
8.一种机动输油管线巡检无人机控制方法,适用于如权利要求1所述的所述的机动输油管线巡检无人机,其特征在于,包括以下步骤:
技术总结本发明涉及巡检无人机技术领域,具体涉及一种机动输油管线巡检无人机及其控制方法,包括机体、驱动组件和影像组件,影像组件包括旋转台、安装台、动力构件、支架、缓冲气囊和缓冲弹簧,旋转台位于机体的底部,安装台与旋转台固定连接,动力构件与旋转台连接,支架与旋转台固定连接,多个缓冲气囊分别与支架固定连接,缓冲弹簧位于缓冲气囊的内部,驱动组件与机体连接。碰到障碍物时,动力构件首先驱动旋转台转动,带动摄像机的镜头远离障碍物,避免镜头碰撞损坏,同时,障碍物会优先触碰到缓冲气囊,利用气压进行缓冲,缓冲弹簧增强缓冲气囊的复弹力,促使缓冲效果更好,避免碰撞损坏,保障巡检效果。技术研发人员:雍歧卫,何德安,张镇,姜俊泽,李江,刘书俊,方钢,郭杨受保护的技术使用者:中国人民解放军陆军勤务学院技术研发日:技术公布日:2024/8/5本文地址:https://www.jishuxx.com/zhuanli/20240808/271076.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表