一种摆臂式U钻自动上下料机械手的制作方法
- 国知局
- 2024-08-08 17:15:31
本技术涉及加工设备,具体为一种摆臂式u钻自动上下料机械手。
背景技术:
1、机械手能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或 操作工具的自动操作装置,机械手可代替人的繁重劳动以实现生产的机械化和自动化,能在有害环境下操作以保护人身安全,因而广泛应用,目前立式二工位u钻钻床需要人工进行上下料操作,较为费时费力,如何有效减少现场工人频繁作业,减少人工重复操作的不稳定性,既能省时省力也可以保证加工的产品的符合加工需求。
2、该方案中,因此需要一种摆臂式u钻自动上下料机械手对上述问题做出改善。
技术实现思路
1、本实用新型的目的在于提供一种摆臂式u钻自动上下料机械手,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
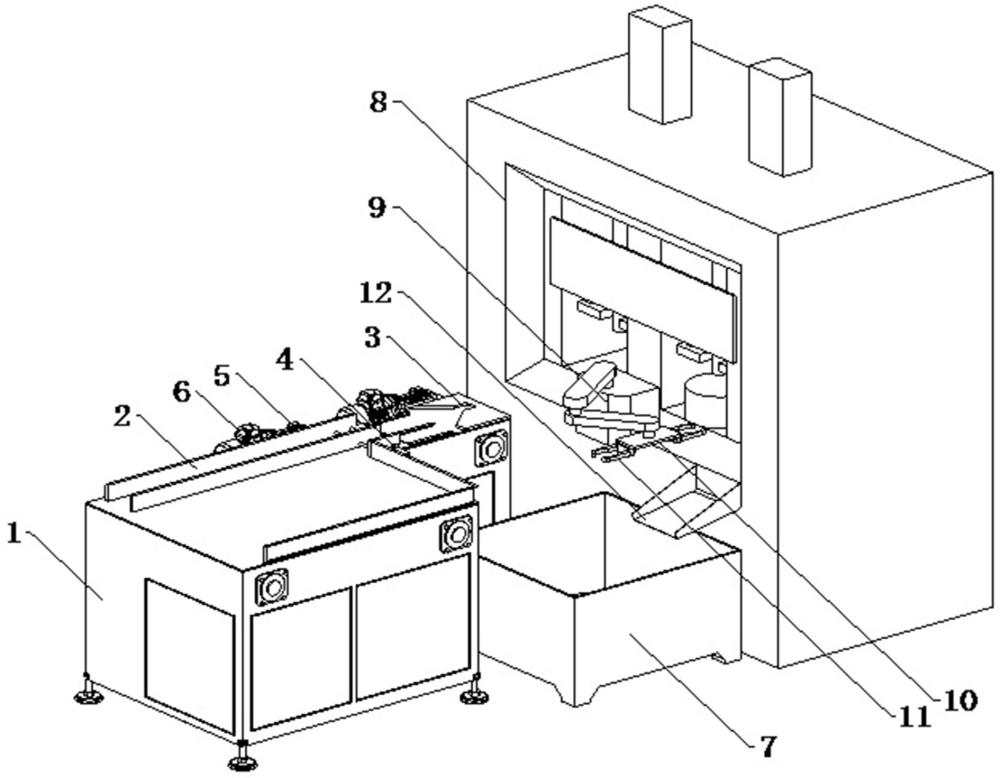
3、一种摆臂式u钻自动上下料机械手,包括板链上料料仓,所述板链上料料仓的外壁上设置有调节挡边,所述板链上料料仓的外壁上设置有末端定位传感器,所述板链上料料仓的侧壁上设置有阻挡放行机构,所述板链上料料仓的侧壁上安装有驱动模组,所述驱动模组的外壁上安装有控制器,所述板链上料料仓的一侧设置有转运料框,所述转运料框的一侧设置有立式二工位u钻钻床,所述立式二工位u钻钻床的外壁上安装有摆臂机器人,所述摆臂机器人的一端安装有法兰连接板,所述法兰连接板的外壁上安装有夹持夹爪,所述立式二工位u钻钻床的外壁上设置有出料壳体。
4、作为本实用新型优选的方案,所述控制器通过导线分别连接有末端定位传感器、驱动模组、立式二工位u钻钻床、摆臂机器人和夹持夹爪且连接方式为电性连接。
5、作为本实用新型优选的方案,所述末端定位传感器位于调节挡边的一侧,所述阻挡放行机构位于调节挡边的一侧。
6、作为本实用新型优选的方案,所述驱动模组设置有两组且分别位于板链上料料仓的侧壁上。
7、作为本实用新型优选的方案,所述立式二工位u钻钻床位于转运料框的一侧,所述出料壳体位于转运料框的一侧。
8、作为本实用新型优选的方案,所述夹持夹爪设置有两组且分别位于法兰连接板相对立的外壁上。
9、与现有技术相比,本实用新型的有益效果是:
10、1、本实用新型中,通过摆臂式u钻自动上下料机械手中的摆臂机器人,并且利用控制器控制板链上料料仓运转,使得板链上料料仓带动加工的板材进行移动,同时阻挡放行机构对材料依次进行放行,当材料移动到末端定位传感器时,使得末端定位传感器产生电信号通过导线传导至控制器,使得控制器控制摆臂机器人移动到材料的正上方,同时控制器控制夹持夹爪进行移动对材料进行夹持,然后控制器控制摆臂机器人移动到立式二工位u钻钻床时,将需要加工的材料放入到立式二工位u钻钻床内进行加工,装置较为省时省力,实用性更好,从而有益于解决目前立式二工位u钻钻床需要人工进行上下料操作,较为费时费力,如何有效减少现场工人频繁作业,减少人工重复操作的不稳定性,既能省时省力也可以保证加工的产品的符合加工需求的问题。
技术特征:1.一种摆臂式u钻自动上下料机械手,包括板链上料料仓(1),其特征在于:所述板链上料料仓(1)的外壁上设置有调节挡边(2),所述板链上料料仓(1)的外壁上设置有末端定位传感器(3),所述板链上料料仓(1)的侧壁上设置有阻挡放行机构(4),所述板链上料料仓(1)的侧壁上安装有驱动模组(5),所述驱动模组(5)的外壁上安装有控制器(6),所述板链上料料仓(1)的一侧设置有转运料框(7),所述转运料框(7)的一侧设置有立式二工位u钻钻床(8),所述立式二工位u钻钻床(8)的外壁上安装有摆臂机器人(9),所述摆臂机器人(9)的一端安装有法兰连接板(10),所述法兰连接板(10)的外壁上安装有夹持夹爪(11),所述立式二工位u钻钻床(8)的外壁上设置有出料壳体(12)。
2.根据权利要求1所述的一种摆臂式u钻自动上下料机械手,其特征在于:所述控制器(6)通过导线分别连接有末端定位传感器(3)、驱动模组(5)、立式二工位u钻钻床(8)、摆臂机器人(9)和夹持夹爪(11)且连接方式为电性连接。
3.根据权利要求1所述的一种摆臂式u钻自动上下料机械手,其特征在于:所述末端定位传感器(3)位于调节挡边(2)的一侧,所述阻挡放行机构(4)位于调节挡边(2)的一侧。
4.根据权利要求1所述的一种摆臂式u钻自动上下料机械手,其特征在于:所述驱动模组(5)设置有两组且分别位于板链上料料仓(1)的侧壁上。
5.根据权利要求1所述的一种摆臂式u钻自动上下料机械手,其特征在于:所述立式二工位u钻钻床(8)位于转运料框(7)的一侧,所述出料壳体(12)位于转运料框(7)的一侧。
6.根据权利要求1所述的一种摆臂式u钻自动上下料机械手,其特征在于:所述夹持夹爪(11)设置有两组且分别位于法兰连接板(10)相对立的外壁上。
技术总结本技术涉及加工设备技术领域,尤其为一种摆臂式U钻自动上下料机械手,包括板链上料料仓,所述板链上料料仓的外壁上设置有调节挡边,所述板链上料料仓的外壁上设置有末端定位传感器,本技术通过设置控制器控制板链上料料仓运转,使得板链上料料仓带动加工的板材进行移动,同时阻挡放行机构对材料依次进行放行,当材料移动到末端定位传感器时,使得末端定位传感器产生电信号通过导线传导至控制器,使得控制器控制摆臂机器人移动到材料的正上方,同时控制器控制夹持夹爪进行移动对材料进行夹持,然后控制器控制摆臂机器人移动到立式二工位U钻钻床时,将需要加工的材料放入到立式二工位U钻钻床内进行加工,装置较为省时省力,实用性更好。技术研发人员:林鹏,贺晓云,孙威受保护的技术使用者:河南法斯特机器人科技有限公司技术研发日:20231124技术公布日:2024/8/5本文地址:https://www.jishuxx.com/zhuanli/20240808/273333.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表