一种运输皮带的自动纠偏方法、装置、设备及介质与流程
- 国知局
- 2024-08-19 14:28:35
本技术涉及皮带跑偏检测,具体而言,涉及一种运输皮带的自动纠偏方法、装置、设备及介质。
背景技术:
1、目前皮带运输机被广泛应用于煤炭、建筑、冶金等行业中。在物料的运输过程中,物料随着传送带一起移动。在实际的生产环境中,由于各种因素的影响很容易出现皮带跑偏的问题,如果跑偏问题不进行及时的处理很容易降低设备的使用寿命,导致物料向外洒落等问题,降低生产效率甚至可能酿成重大安全事故。
2、现有的皮带跑偏检测方法包括:接触式传感器检测、机械装置检测和人工巡检三种;采用人工巡检的方法需要人工对皮带跑偏情况进行判断,容易受人工因素影响,耗时耗力,成本高昂,并且实时性差,检测效果差;采用接触式传感器进行跑偏检测,可靠性偏低,出现传感器失灵的情况,很容易导致生产事故发生;采用机械检测装置进行检测无法实现精确的检测。现有的基于计算机视觉的皮带跑偏检测方法,鲁棒性低,容易受到环境干扰。
技术实现思路
1、本技术实施例的目的在于提供一种运输皮带的自动纠偏方法、装置、设备及介质,用以解决现有技术存在的上述问题,可快速准确的识别皮带跑偏故障。
2、第一方面,提供了一种运输皮带的自动纠偏方法,该方法可以包括:
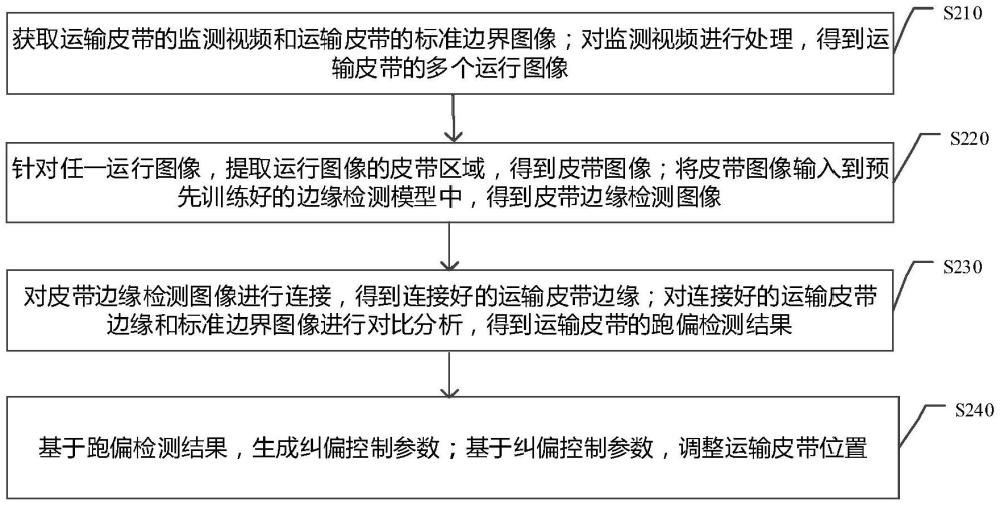
3、获取运输皮带的监测视频和运输皮带的标准边界图像;
4、对所述监测视频进行处理,得到所述运输皮带的多个运行图像;
5、针对任一运行图像,提取所述运行图像的皮带区域,得到皮带图像;
6、将所述皮带图像输入到预先训练好的边缘检测模型中,得到皮带边缘检测图像;其中,所述边缘检测模型包括基于卷积神经网络、自注意力网络和空洞卷积网络构建的编码器,以及基于卷积神经网络构建的解码器;
7、对所述皮带边缘检测图像进行连接,得到连接好的运输皮带边缘;
8、对所述连接好的运输皮带边缘和所述标准边界图像进行对比分析,得到所述运输皮带的跑偏检测结果;
9、基于所述跑偏检测结果,生成纠偏控制参数;基于所述纠偏控制参数,调整运输皮带位置。
10、在一个可选的实现中,所述编码器由基于卷积神经网络的第一特征提取模块和基于滑动窗口深度自注意力变换网络的第二特征提取模块组成;
11、所述第一特征提取模块包括:主干特征提取网络和加强特征提取网络;
12、所述主干特征提取网络,用于对皮带图像进行特征提取,得到皮带第一有效特征层和皮带第二有效特征层;
13、所述加强特征提取网络,用于采用不同的空洞率对所述皮带第一有效特征层和所述皮带第二有效特征层进行空洞卷积,得到皮带第三有效特征层;
14、所述第二特征提取模块包括:第一自注意力提取模块和第二自注意力提取模块;所述第一自注意力提取模块和所述第二自注意力提取模块,分别用于对皮带图像进行特征提取,得到皮带第四有效特征层和皮带第五有效特征层。
15、在一个可选的实现中,所述解码器由卷积神经网络组成;
16、所述解码器,具体用于:
17、将所述皮带第一有效特征层、所述皮带第二有效特征层和所述皮带第四有效特征层进行特征融合,得到皮带第六有效特征层;
18、将所述皮带第三有效特征层和所述皮带第五有效特征层进行特征融合,得到皮带第七有效特征层;
19、将得到的皮带第六有效特征层和皮带第七有效特征层在通道维度进行拼接得到皮带第八有效特征层;
20、将所述皮带第八有效特征层进行卷积处理和反卷积处理,得到皮带边缘检测图像。
21、在一个可选的实现中,提取所述运行图像的皮带区域,得到皮带图像,包括:
22、从所述运行图像中提取截取皮带区域,得到皮带区域图像;
23、采用均值和标准差对所述皮带区域图像进行归一化处理,得到皮带图像。
24、在一个可选的实现中,所述皮带边缘检测图像中包含至少两条平行的皮带边缘线;
25、对所述皮带边缘检测图像进行连接,得到连接好的运输皮带边缘,包括:
26、针对所述皮带边缘检测图像中的任一皮带边缘线,将所述皮带边缘线作为起始边缘线;
27、沿所述起始边缘线的方向,对所述起始边缘线进行检测,得到位于所述起始边缘线末端的目标端点;其中,所述起始边缘线的方向是基于所述起始边缘线的斜率确定的;
28、以所述目标端点为起始点,基于预设角度和预设半径,沿所述起始边缘线的方向扇形搜索,得到目标连接点;
29、若所述目标连接点符合预设标准,则将所述目标端点和所述目标连接点连接,得到新的起始边缘线,并返回执行步骤:沿所述起始边缘线的方向,对所述起始边缘线进行检测,得到位于所述起始边缘线末端的目标端点,直至到达皮带边缘检测图像的边界点;
30、若所述目标连接点不符合预设标准,则删除所述目标连接点,并返回执行步骤:以所述目标端点为起始点,基于预设角度和预设半径,沿所述起始边缘线的方向扇形搜索,得到目标连接点,直至到达皮带边缘检测图像的边界点。
31、在一个可选的实现中,在对所述连接好的运输皮带边缘和所述标准边界图像进行对比分析之前,所述方法还包括:
32、获取所述运输皮带的实际宽度以及所述运输皮带在所述连接好的运输皮带边缘中的图像宽度;
33、基于所述实际宽度和所述图像宽度,确定所述运输皮带的宽度转换系数。
34、在一个可选的实现中,对所述连接好的运输皮带边缘和所述标准边界图像进行对比分析,得到所述运输皮带的跑偏检测结果,包括:
35、基于所述连接好的运输皮带边缘,确定所述运输皮带的实时中心坐标;
36、基于所述标准边界图像,确定所述运输皮带的标准中心坐标;
37、基于所述实时中心坐标与所述标准中心坐标的差值,确定所述运输皮带的跑偏方向;
38、基于所述差值和所述宽度转换系数,确定所述运输皮带的跑偏距离;
39、基于所述跑偏方向和所述跑偏距离,得到所述运输皮带的跑偏检测结果。
40、在一个可选的实现中,在得到所述运输皮带的跑偏检测结果之后,所述方法还包括:
41、若所述跑偏距离大于预设阈值,则生成报警提示。
42、第二方面,提供了一种运输皮带的自动纠偏装置,该装置可以包括:
43、获取单元,用于获取运输皮带的监测视频和运输皮带的标准边界图像;
44、处理单元,用于对所述监测视频进行处理,得到所述运输皮带的多个运行图像;
45、提取单元,用于针对任一运行图像,提取所述运行图像的皮带区域,得到皮带图像;
46、检测单元,用于将所述皮带图像输入到预先训练好的边缘检测模型中,得到皮带边缘检测图像;其中,所述边缘检测模型包括基于卷积神经网络、自注意力网络和空洞卷积网络构建的编码器,以及基于卷积神经网络构建的解码器;
47、分析单元,用于对所述皮带边缘检测图像进行连接,得到连接好的运输皮带边缘;对所述连接好的运输皮带边缘和所述标准边界图像进行对比分析,得到所述运输皮带的跑偏检测结果;
48、纠偏单元,用于基于所述跑偏检测结果,生成纠偏控制参数;基于所述纠偏控制参数,调整运输皮带位置。
49、第三方面,提供了一种电子设备,该电子设备包括处理器、通信接口、存储器和通信总线,其中,处理器,通信接口,存储器通过通信总线完成相互间的通信;
50、存储器,用于存放计算机程序;
51、处理器,用于执行存储器上所存放的程序时,实现上述第一方面中任一所述的方法步骤。
52、第四方面,提供了一种计算机可读存储介质,该计算机可读存储介质内存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面中任一所述的方法步骤。
53、本技术通过分析运行图像实时监控皮带的运行状态,计算皮带的跑偏距离和跑偏方向,并对跑偏状况进行报警提示;相较于接触式传感器和人工定期巡检的方式,节省了人工成本并且实时性更高,并且采用机器视觉的方案显示信息更加丰富,具有非接触式的优点,不会对运输产生干扰;在皮带发生跑偏故障的时候,能够快速准确的识别并发出预警信息。
54、本发明通过计算结果的图像信息可以使工作人员更加直观的观察到皮带的运行状态;本发明采用了基于深度学习网络的边缘检测模型对皮带边缘进行检测,相较于传统算法,深度学习算法鲁棒性更强;可应用于矿场,化工厂等依靠皮带运输机运输物料的企业。
55、本发明不仅减少了监控人员工作量和工作强度,而且还会减少企业的人工成本,同时由于基于视觉的检测方案会实时显示图像信息,方便企业对生产环节中各个环节进行可视化分析。
56、本技术将cnn与transformer相结合并加入空洞卷积,结合轻量型特征提取网络构建边缘检测模型,不仅提高了皮带边缘检测速度还提升了皮带边缘检测的准确率。
本文地址:https://www.jishuxx.com/zhuanli/20240819/275335.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。