一种高精度随形自由推扫位移机构和控制方法
- 国知局
- 2024-08-22 14:15:01
本发明涉及一种高精度随形自由推扫位移机构和控制方法,应用于大尺寸高精度陶瓷光固化/纤维增韧复合增材制造装备中的随行自由推扫和精确定位。
背景技术:
1、先进陶瓷复杂构件是支撑我国新一代航空、航天等战略性新兴产业发展的重要基础。航空、航天、能源化工等重点领域中大尺寸复杂结构特种陶瓷关键构件对高精度装备具有迫切需求。大尺寸高精度陶瓷增材制造装备是先实现复杂陶瓷构件成形的革命性技术。大尺寸高精度陶瓷增材制造装备中高精度随行自由推扫位移机构和控制方法是实现光固化/纤维增韧复合成形工艺的关键一环。传统的位移机构x轴采用单边驱动,其推力较小,响应速度慢,抗干扰能力弱;尤其是自由推扫的过程中,y轴大负载快速移动,当y轴负载在靠近电机一侧和远离电机一侧时,对非对称单侧电机的推力要求有较大差异,这会造成电机有较大的推力波动,对电机性能提出严重挑战。因此,拟采用对称式双边冗余驱动的x轴构型,x轴两侧各有一个电机驱动,这样无论y轴负载在哪侧,都有对应侧的电机出力。这样的对称式结构降低了电机的推力波动,增强了抗干扰能力,且双电机推力大,响应速度快。但这种冗余驱动的构型也给运动控制方法提出了挑战。具体来说,双电机的同步控制必须得到保证。否则,会造成两平行轴相互拉扯,对随行自由推扫精度造成影响,甚至是机械机构的破坏。综上所述,亟待提出一种对称式双边驱动的随行自由推扫位移机构,并提出相应的高精度随行自由推扫和高性能双电机同步的运动控制方法。
技术实现思路
1、为克服现有技术的不足,本发明提供一种高精度随形自由推扫位移机构和控制方法,位移机构可实现xyz三个方向的运动,x轴、y轴和z轴都采用旋转电机驱动封闭式滚珠丝杠来实现高精度的直线运动。
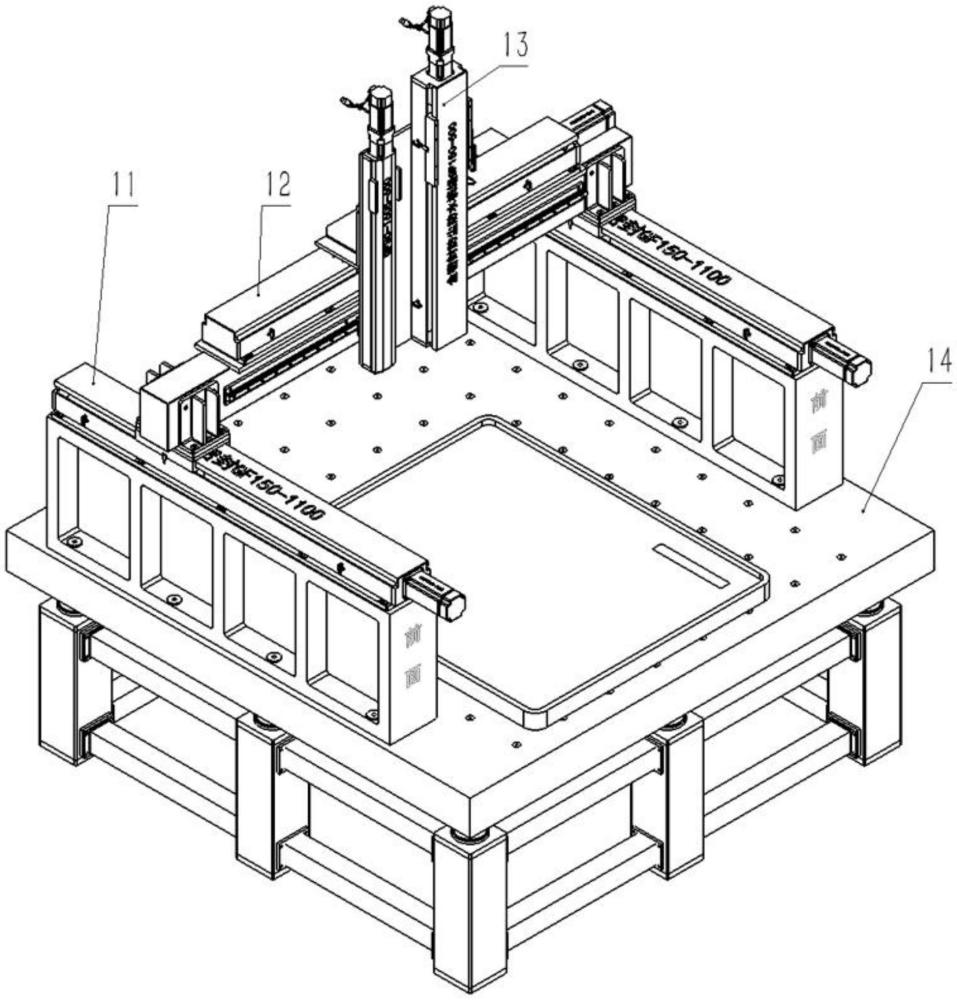
2、一种大尺寸陶瓷光固化喷射沉积复合成形高精度随形自由推扫位移机构,包括大理石台、x轴位移子系统、y轴位移子系统和z轴位移子系统,所述大理石台的上侧设置有x轴位移子系统,x轴位移子系统上设置有y轴位移子系统,y轴位移子系统上设置有z轴位移子系统。
3、所述大理石台包括橡胶阻尼支架、工作台面、x轴模组安装基座,橡胶阻尼支架的上侧设置有工作台面,工作台面的上侧对称设置有两个x轴模组安装基座。
4、所述大理石台用于安装位移机构,是整个位移机构的安装支座。
5、所述x轴位移子系统包括旋转电机一、封闭式滚珠丝杠一和光栅编码器一;所述x轴位移子系统安装在大理石台上的x轴模组安装基座上,包括对称布置的两个相互平行的封闭式封闭式滚珠丝杠一,封闭式滚珠丝杠一由旋转电机一驱动;封闭式滚珠丝杠一的一侧安装有光栅编码器一,能够测量封闭式滚珠丝杠一动子的位移。
6、所述x轴位移子系统能够推动y轴位移子系统及其负载实现沿x轴的位移。
7、所述y轴位移子系统包括xy轴连接板、横梁、封闭式滚珠丝杠二、旋转电机二、导轨和光栅编码器二;所述y轴位移子系统横跨安装在x轴位移子系统上,横梁的上方安装封闭式滚珠丝杠二,封闭式滚珠丝杠二由旋转电机二驱动,横梁的侧方安装导轨,用于z轴的安装和导向;封闭式滚珠丝杠二的后侧安装有光栅编码器二,能够测量封闭式滚珠丝杠二的位移;所述封闭式滚珠丝杠四的右侧安装有光栅编码器三,能够测量封闭式滚珠丝杠四动子的位移。
8、所述y轴位移子系统能够推动z轴及其负载实现沿y轴的位移。
9、所述z轴位移子系统安装在y轴位移子系统的动子上,所述z轴位移子系统包括模组安装板、封闭式滚珠丝杠三、旋转电机三、封闭式滚珠丝杠四、旋转电机四、yz轴连接板和光栅编码器三;所述yz轴连接板用于连接y轴位移子系统动子和z轴位移子系统上的模组安装板,封闭式滚珠丝杠三和封闭式滚珠丝杠四并排安装在模组安装板上,实现z轴位移子系统上的动子沿z轴的上下运动,旋转电机三驱动封闭式滚珠丝杠三,旋转电机四驱动封闭式滚珠丝杠四;
10、所述封闭式滚珠丝杠三用于安装纤维增韧模块并实现其沿z轴的上下运动,封闭式滚珠丝杠四用于安装随行光固化模块并实现其沿z轴的上下运动。
11、一种高精度随形自由推扫位移机构的二元运动控制方法,包括以下步骤:
12、步骤一:首先分析位移机构的构型,做出位移机构的自由体图,采用拉格朗日方法推导位移机构的交叉耦合动力学方程;
13、步骤二:根据被打印件切片形状和轨迹规划得到期望的随行自由推扫轨迹,根据电机编码器反馈得到滚珠丝杠动子的位置信息,进而得到实际推扫轨迹与期望推扫轨迹之间的跟踪误差;
14、步骤三:将交叉耦合动力学方程写成参数线性化的形式,其中的动力学参数由基于跟踪误差的自适应律来更新,将期望轨迹带入到动力学方程中,计算得到实现该期望轨迹电机理论上该付出的推力,将其作为前馈控制信号;
15、步骤四:反馈控制采用比例微分控制,误差信号经过比例微分环节得到反馈控制信号,用于处理模型误差及外部扰动,增强闭环控制系统的鲁棒性;
16、步骤五:采用李亚普诺夫理论证明整个闭环控制系统的稳定性;将前馈控制信号与反馈控制信号叠加,作为整体控制信号,发送给各轴电机,从而实现xy轴联动交叉耦合控制,实现高精度随行自由推扫。
17、本发明一种高精度随形自由推扫位移机构和控制方法的有益效果是:
18、位移机构可以带着增材制造设备的光固化模块和纤维增韧模块运动,实现两者的功能及其切换配合,完成大尺寸陶瓷复合成形。光栅编码器可以实时反馈丝杠动子的位置信息,该反馈信息可以用作动子运动的闭环控制;根据位移机构的构型,可由拉格朗日方法推导位移机构的动力学模型,由此实现基于模型的自适应前馈+鲁棒控制反馈的二元控制方法。
技术特征:1.一种高精度随形自由推扫位移机构,包括大理石台(14)、x轴位移子系统(11)、y轴位移子系统(12)和z轴位移子系统(13),其特征在于:所述大理石台(14)的上侧设置有x轴位移子系统(11),x轴位移子系统(11)上设置有y轴位移子系统(12),y轴位移子系统(12)上设置有z轴位移子系统(13)。
2.根据权利要求1所述的一种高精度随形自由推扫位移机构,其特征在于:所述大理石台(14)包括橡胶阻尼支架(21)、工作台面(22)、x轴模组安装基座(23),橡胶阻尼支架(21)的上侧设置有工作台面(22),工作台面(22)的上侧对称设置有两个x轴模组安装基座(23)。
3.根据权利要求2所述的一种高精度随形自由推扫位移机构,其特征在于:所述大理石台(14)用于安装位移机构,是整个位移机构的安装支座。
4.根据权利要求1所述的一种高精度随形自由推扫位移机构,其特征在于:所述x轴位移子系统(11)包括旋转电机一(31)、封闭式滚珠丝杠一(32)和光栅编码器一(33);所述x轴位移子系统(11)安装在大理石台(14)上的x轴模组安装基座(23)上,包括对称布置的两个相互平行的封闭式封闭式滚珠丝杠一(32),封闭式滚珠丝杠一(32)由旋转电机一(31)驱动;封闭式滚珠丝杠一(32)的一侧安装有光栅编码器一(33),能够测量封闭式滚珠丝杠一(32)动子的位移。
5.根据权利要求4所述的一种高精度随形自由推扫位移机构,其特征在于:所述x轴位移子系统(11)能够推动y轴位移子系统(12)及其负载实现沿x轴的位移。
6.根据权利要求1所述的一种高精度随形自由推扫位移机构,其特征在于:所述y轴位移子系统(12)包括xy轴连接板(41)、横梁(42)、封闭式滚珠丝杠二(43)、旋转电机二(44)、导轨(45)和光栅编码器二(46);所述y轴位移子系统(12)横跨安装在x轴位移子系统(11)上,横梁(42)的上方安装封闭式滚珠丝杠二(43),封闭式滚珠丝杠二(43)由旋转电机二(44)驱动,横梁(42)的侧方安装导轨(45),用于z轴的安装和导向;封闭式滚珠丝杠二(43)的后侧安装有光栅编码器二(46),能够测量封闭式滚珠丝杠二(43)的位移;所述封闭式滚珠丝杠四(53)的右侧安装有光栅编码器三(56),能够测量封闭式滚珠丝杠四(53)动子的位移。
7.根据权利要求6所述的一种高精度随形自由推扫位移机构,其特征在于:所述y轴位移子系统(12)能够推动z轴及其负载实现沿y轴的位移。
8.根据权利要求1所述的一种高精度随形自由推扫位移机构,其特征在于:所述z轴位移子系统(13)安装在y轴位移子系统(12)的动子上,所述z轴位移子系统(13)包括模组安装板、封闭式滚珠丝杠三(51)、旋转电机三(52)、封闭式滚珠丝杠四(53)、旋转电机四(54)、yz轴连接板(55)和光栅编码器三(56);所述yz轴连接板(55)用于连接y轴位移子系统(12)动子和z轴位移子系统(13)上的模组安装板,封闭式滚珠丝杠三(51)和封闭式滚珠丝杠四(53)并排安装在模组安装板上,实现z轴位移子系统(13)上的动子沿z轴的上下运动,旋转电机三(52)驱动封闭式滚珠丝杠三(51),旋转电机四(54)驱动封闭式滚珠丝杠四(53)。
9.根据权利要求8所述的一种高精度随形自由推扫位移机构,其特征在于:所述封闭式滚珠丝杠三(51)用于安装纤维增韧模块并实现其沿z轴的上下运动,封闭式滚珠丝杠四(53)用于安装随行光固化模块并实现其沿z轴的上下运动。
10.一种高精度随形自由推扫位移机构的二元运动控制方法,其特征在于,包括以下步骤:
技术总结本发明涉及一种高精度随形自由推扫位移机构和控制方法,应用于大尺寸高精度陶瓷光固化/纤维增韧复合增材制造装备中的随行自由推扫和精确定位。位移机构包括大理石台、X轴位移子系统、Y轴位移子系统和Z轴位移子系统,所述大理石台的上侧设置有X轴位移子系统,X轴位移子系统上设置有Y轴位移子系统,Y轴位移子系统上设置有Z轴位移子系统。位移机构可实现XYZ三个方向的运动,X轴、Y轴和Z轴都采用旋转电机驱动封闭式滚珠丝杠来实现高精度的直线运动。技术研发人员:周德开,万云飞,祖渝峰,任贻宏,乔菁,李隆球受保护的技术使用者:哈尔滨工业大学技术研发日:技术公布日:2024/8/21本文地址:https://www.jishuxx.com/zhuanli/20240822/277675.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表