手术辅助机器人以及枢转位置设定方法与流程
- 国知局
- 2024-08-22 14:27:31
本发明涉及一种手术辅助机器人以及枢转位置设定方法,特别是涉及一种将枢转位置作为支点来将安装于臂的医疗器械移动的手术辅助机器人以及枢转位置设定方法。
背景技术:
1、以往,已知有将枢转位置作为支点使安装于臂的医疗器械移动的手术辅助机器人。这样的手术辅助机器人例如在日本特表2016-516487号公报中公开。
2、在日本特表2016-516487号公报中,公开了具备操纵装置臂、和安装于操纵装置臂的工具(外科用的手术器械等)的机器人操纵装置组件。另外,操纵装置臂构成为使安装于操纵装置臂的工具平移移动、或者旋转移动。
3、另外,在日本特表2016-516487号公报的操纵装置臂中,设置有用于使工具沿着长边方向平移的器械支架。另外,作为器械支架的远侧部件保持有插管。保持于器械支架的工具的前端插入插管。另外,在日本特表2016-516487号公报的机器人操纵装置组件中,插管的规定的部分被预先决定为枢转点。即,在日本特表2016-516487号公报的机器人操纵装置组件中,枢转点被机械地确定为相对于保持于器械支架的状态的插管的规定的部分呈平行四边形的配置。而且,在保持于器械支架的插管已插入患者的状态下,将枢转点作为支点,将工具枢动(旋转移动)。
4、然而,在日本特表2016-516487号公报那样的机器人操纵装置组件中,四个机器人操纵装置组件的各自的器械支架分别保持四个插管(套管针)。因此,由于四个器械支架以及它们的插管保持机构,从而插入有四个插管(套管针)的患者的身体表面附近的空间变窄。因此,存在助理医生插入于患者的套管针的配置的自由度变低这一问题点、在手术中助手的医师进行辅助作业时器械支架等机构妨碍作业这一问题点。
技术实现思路
1、本发明是为了解决上述那样的课题而完成的,本发明的一个目的是提供与机械地确定枢转点(枢转位置)的情况相比,能够容易地进行在配置有多个套管针的患者的身体表面附近的作业的手术辅助机器人以及枢转位置设定方法。
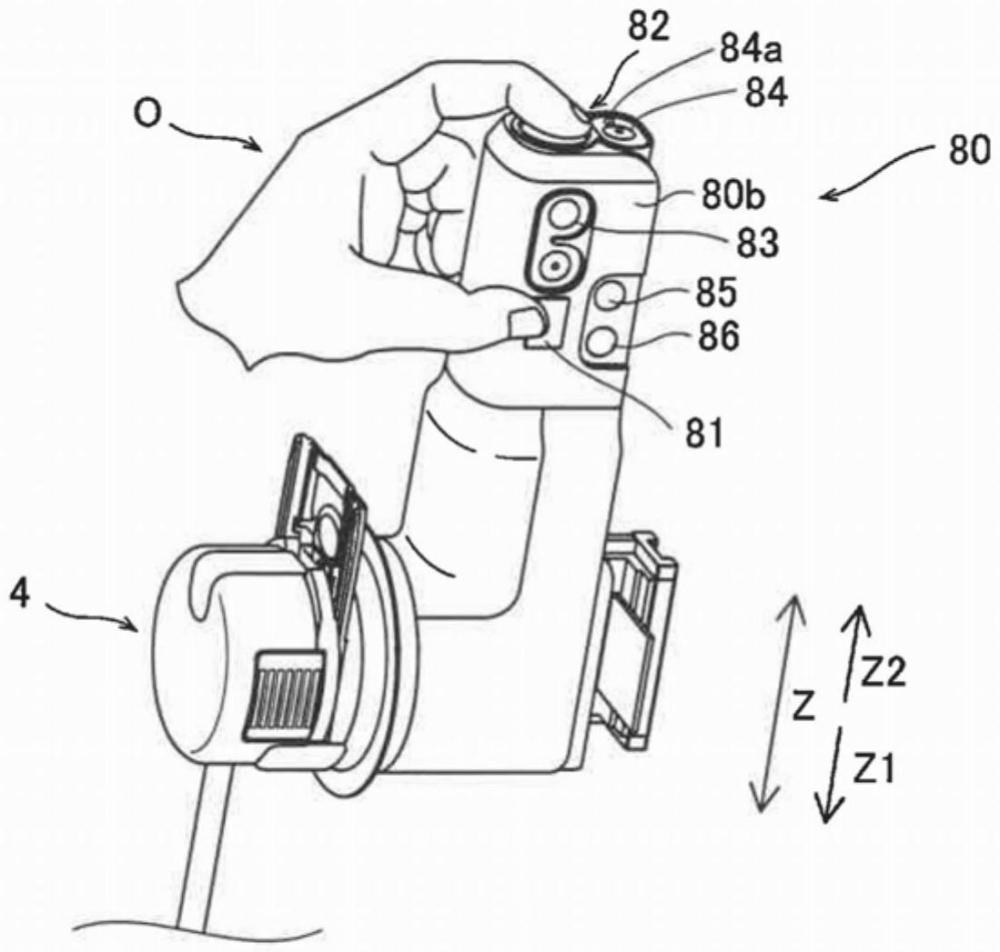
2、为了实现上述目的,本发明的第一方面的手术辅助机器人具备:臂,在前端侧供医疗器械安装;以及操作部,安装于臂,对臂进行操作,操作部包含示教成为安装于臂的医疗器械的移动的支点的枢转位置的枢转位置示教按钮,在通过操作部操作臂从而使安装于臂的前端侧的医疗器械的前端移动至与插入患者的身体表面的套管针的插入位置对应的位置的状态下,按下枢转位置示教按钮,由此示教枢转位置。
3、在本发明的第一方面的手术辅助机器人中,如上述那样,在通过操作部操作臂从而使安装于臂的前端侧的医疗器械的前端移动至与插入患者的身体表面的套管针的插入位置对应的位置的状态下,按下枢转位置示教按钮,由此示教枢转位置。由此,由于通过按下枢转位置示教按钮从而示教枢转位置,因此不需要为了示教(设定)枢转位置而配置支承套管针的器械等。其结果是,与机械地确定枢转位置的情况相比,能够容易地进行在配置有多个套管针的患者的身体表面附近的作业。
4、本发明的第二方面的枢转位置设定方法是由外科手术系统(100)所包含的计算机执行的枢转位置的设定方法,包括:为了使安装于手术辅助机器人的臂的前端侧的医疗器械的前端移动至与插入于患者的身体表面的套管针的插入位置对应的位置而受理臂的操作的工序;以及为了设定成为安装于臂的医疗器械的移动的支点的枢转位置,而在将医疗器械的前端定位于与套管针的插入位置对应的位置的状态下受理枢转位置示教按钮的按下的工序
5、对本发明的第二方面的枢转位置设定方法而言,如上述那样,具备为了设定成为安装于臂的医疗器械的移动的支点的枢转位置而在将医疗器械的前端定位于与套管针的插入位置对应的位置的状态下受理枢转位置示教按钮的按下的工序。由此,通过按下枢转位置示教按钮从而示教枢转位置,因此不需要为了示教(设定)枢转位置而配置支承套管针的器械等。其结果是,能够提供一种与机械地确定枢转位置的情况相比,能够容易地进行在配置有多个套管针的患者的身体表面附近的作业的枢转位置设定方法。
6、本发明的第三方面的枢转位置设定方法是由外科手术系统(100)中包含的计算机执行的枢转位置的设定方法,包括:为了使安装于手术辅助机器人的臂的前端侧的医疗器械的前端移动至插入于患者的身体表面的套管针的外表面与身体表面接触的位置而受理臂的操作的工序;以及为了设定成为安装于臂的医疗器械的移动的支点的枢转位置,在将医疗器械的前端定位于插入患者的身体表面的套管针的外表面与身体表面接触的位置的状态下受理枢转位置的示教的指示的工序。
7、对本发明的第三方面的枢转位置设定方法而言,如上述那样,具备为了设定成为安装于臂的医疗器械的移动的支点的枢转位置,在将医疗器械的前端定位于插入患者的身体表面的套管针的外表面与身体表面接触的位置的状态下受理枢转位置的示教的指示的工序。由此,通过按下枢转位置示教按钮从而示教枢转位置,因此不需要为了示教(设定)枢转位置而配置支承套管针的器械等。其结果是,能够提供一种与机械地确定枢转位置的情况相比,能够容易地进行在配置有多个套管针的患者的身体表面附近的作业的枢转位置设定方法。
8、根据本发明,如上述那样,与机械地确定枢转点(枢转位置)的情况相比,能够容易地进行在配置有多个套管针的患者的身体表面附近的作业。
技术特征:1.一种手术辅助机器人,其中,具备:
2.根据权利要求1所述的手术辅助机器人,其中,
3.根据权利要求2所述的手术辅助机器人,其中,
4.根据权利要求2或3所述的手术辅助机器人,其中,
5.根据权利要求4所述的手术辅助机器人,其中,还具备:
6.根据权利要求4所述的手术辅助机器人,其中,
7.根据权利要求2或3所述的手术辅助机器人,其中,
8.根据权利要求2或3所述的手术辅助机器人,其中,
9.根据权利要求8所述的手术辅助机器人,其中,
10.根据权利要求2或3所述的手术辅助机器人,其中,
11.根据权利要求2或3所述的手术辅助机器人,其中,
12.根据权利要求2或3所述的手术辅助机器人,其中,
13.一种计算机的控制方法,其是外科手术系统(100)所包含的计算机的控制方法,其中,包括:
14.根据权利要求13所述的计算机的控制方法,其中,
15.根据权利要求14所述的计算机的控制方法,其中,
16.根据权利要求15所述的计算机的控制方法,其中,
17.根据权利要求14~16中任一项所述的计算机的控制方法,其中,
18.根据权利要求14~16中任一项所述的计算机的控制方法,其中,
19.根据权利要求13所述的计算机的控制方法,其中,
20.根据权利要求19所述的计算机的控制方法,其中,
21.根据权利要求19或20所述的计算机的控制方法,其中,
技术总结对本发明的该手术辅助机器人而言,在已使医疗器械的前端移动至与插入患者的身体表面插入的套管针的插入位置对应的位置的状态下,通过按下枢转位置示教按钮从而示教枢转位置。技术研发人员:北辻博明,东条刚史,谷掛悠祐受保护的技术使用者:川崎重工业株式会社技术研发日:技术公布日:2024/8/20本文地址:https://www.jishuxx.com/zhuanli/20240822/278761.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表