脚踏操控装置及手术机器人的制作方法
- 国知局
- 2024-08-19 14:32:32
本技术涉及医疗器械,尤其涉及一种脚踏操控装置及手术机器人。
背景技术:
1、随着科技的不断发展,手术机器人基于创口小、操作精细、无疲劳颤抖等优势而被广泛的应用到手术中。
2、常见的手术机器人可以包括医生操控平台、患者侧手推车和显示设备等,外科医生在医生操控平台操作输入装置,并将输入传给与远程操作的外科器械连接的患者侧手推车。医生操控平台包括脚踏组件,操作者可以通过踩踏脚踏组件上的脚踏按钮,实现功能切换或开关等功能。
3、由于不同操作者的身高、腿长有所差异,脚踩上脚踏按钮后的舒适度不能达到最佳适应状态,医生手术操作过程长,长时间保持不适合的体态位姿,容易造成操作疲劳,现有的脚踏一般都是固定设置,无调节功能,或者仅是针对伸出缩回的方向进行调节,不能完全解决操作舒适度的问题。而且上述的医生操控平台还存在移动运输不便及驻停效果不理想的问题。
技术实现思路
1、本技术提供一种脚踏操控装置及手术机器人,该脚踏操控装置能够调节脚踏组件的高度,以适应不同操作者的操作,提升操作体验,且便于实现手术机器人的医生操控平台的移动,并提升医生操控平台的驻停效果。
2、本技术第一方面提供一种脚踏操控装置,包括支撑座、脚踏组件和至少一组第一驱动组件,支撑座上具有缺口,至少部分脚踏组件位于缺口内,脚踏组件相对支撑座沿穿过缺口的第一方向升降移动。例如,以第一方向垂直于支撑座所在平面为例,即脚踏组件可以沿垂直于支撑座的方向上下升降移动。
3、第一驱动组件设置在支撑座上,第一驱动组件与脚踏组件连接,第一驱动组件用于驱动脚踏组件升降移动。通过第一驱动组件能够驱动脚踏组件相对支撑座沿第一方向上下升降移动,支撑座可以置于地面等上,也就使脚踏组件可以沿第一方向相对地面上下升降移动,调整脚踏组件相对于支撑座及地面的高度,实现了脚踏组件相对地面高度的灵活调节,使脚踏组件能够适应不同操作者的操作需求,满足脚踏组件高度调节适应功能的要求,提升脚踏操控装置及手术机器人的操控体验。
4、此外,脚踏组件沿第一方向的可升降移动,可以使脚踏组件抬高,脚踏组件相对地面具有较高间距,便于脚踏操控装置及医生操控平台整机的移动运输,减小或避免在运输过程中,由于地面等不平及脚踏操控装置离地面高度较低而对脚踏操控装置造成的损伤,利于提升脚踏操控装置及手术机器人的寿命。还可以降低脚踏组件的高度,使脚踏组件的脚踏主体背面整体与地面接触,增大脚踏操控装置及医生操控平台整机与地面的接触面积,提升驻停效果。
5、在一种可能的实现方式中,支撑座包括相背的上平面和下平面,缺口贯穿支撑座的上平面和下平面设置。
6、第一驱动组件包括可伸缩的输出杆,输出杆的伸缩方向与第一方向一致,输出杆与脚踏组件连接。
7、这样,通过输出杆的伸缩移动,就能够带动脚踏组件沿第一方向升降移动,结构设计简单,便于实现。
8、在一种可能的实现方式中,脚踏操控装置还包括支撑脚杯,支撑脚杯设置在输出杆背离下平面的一端端部,第一驱动组件用于通过输出杆带动支撑脚杯沿第一方向升降移动。
9、这样,使支撑脚杯能够沿第一方向相对地面上下升降移动,可以使支撑脚杯相对地面的高度较高,满足脚踏操控装置及医生操控平台的移动需求,减小或避免移动运输过程中对支撑脚杯造成的损伤。
10、也可以使支撑脚杯与地面接触,实现对脚踏操控装置及医生操控平台的限位固定,实现驻停刹车功能,进一步提升驻停效果。
11、在一种可能的实现方式中,第一驱动组件还包括第一驱动件和传动件,第一驱动件的输出端通过传动件与输出杆连接,第一驱动件的输出端带动传动件转动,传动件带动输出杆沿第一方向移动。
12、这样,第一驱动件输出的转动力可以通过传动件带动输出杆实现沿第一方向的伸缩,结构设计简单,便于实现且利于降低成本。
13、在一种可能的实现方式中,支撑座上开设有第一安装通槽,脚踏操控装置还包括固定板,固定板设置在支撑座的下平面上,固定板盖设在第一安装通槽上,固定板上开设有第二安装通槽。
14、至少部分第一驱动件容纳在安装通槽内,第一驱动件抵接固定在固定板面向支撑座的一面上,传动件、输出杆穿过第二安装通槽设置。
15、这样,穿过第二安装通槽的输出杆可以分别与连接件和支撑脚杯连接,实现第一驱动组件与支撑座的装配固定的条件下,便于同时实现输出杆与脚踏组件、支撑脚杯的连接固定。
16、在一种可能的实现方式中,支撑脚杯包括支撑件和安装件,安装件与输出杆连接。安装件背向输出杆的一端上具有凸球结构,支撑件上具有与凸球结构配合的凹槽,凸球结构插装在凹槽内,且凸球结构可转动。
17、这样,当脚踏操控装置及医生操控平台在倾斜不平的地面等上驻停刹车时,支撑件相对安装件及整个脚踏操控装置的可转动,使支撑件能够随着地面适应性的调整相对安装件的角度位置,支撑件可以很好的与倾斜的地面接触支撑,利于提升脚踏操控装置的稳定性和可靠性。
18、在一种可能的实现方式中,脚踏操控装置还包括连接件,连接件位于下平面背向上平面的一侧,连接件一端与输出杆连接,连接件另一端与脚踏组件连接。
19、这样,通过连接件就能够实现输出杆与脚踏组件的连接,结构设计简单,且具有很好的连接牢度。
20、在一种可能的实现方式中,连接件包括相连的第一连接部和第二连接部,第一连接部与输出杆连接,第二连接部与脚踏组件连接。便于实现输出杆与脚踏组件的稳定连接。
21、其中第一连接部的延伸方向可以与第二连接部的延伸方向相交。如第一连接部和第二连接部的延伸方向可以相垂直,使连接件呈类l型。如第一连接部的延伸方向可以与输出杆的伸缩方向相交,如可以与输出杆的伸缩方向垂直,便于实现第一连接部与输出杆的连接。第二连接部可以沿输出杆的伸缩方向(第一方向)延伸,第二连接部可以与脚踏组件上沿第一方向分布的侧壁固定,增大接触面积,保证第二连接部与脚踏组件的结合牢度,以稳定带动脚踏组件移动。
22、在一种可能的实现方式中,支撑座上设有沿第一方向延伸的导向件,脚踏组件上设有活动件,活动件沿导向件的延伸方向滑动。
23、这样,在第一驱动组件的带动下,可以使脚踏组件通过活动件沿导向件的延伸方向滑动,实现脚踏组件沿第一方向的升降移动。导向件可以对脚踏组件的升降移动起到限位导向的作用,保证脚踏组件沿第一方向升降移动。
24、在一种可能的实现方式中,支撑座上设有沿第一方向延伸的导向件,脚踏组件包括活动件和脚踏主体,活动件沿导向件的延伸方向滑动。
25、脚踏主体相对活动件沿第二方向滑动,第二方向垂直于第一方向。
26、这样,脚踏主体及脚踏组件可以通过活动件沿导向件的延伸方向滑动,保证脚踏主体沿第一方向的升降移动。脚踏主体还可以相对活动件沿第二方向滑动,也就使脚踏主体可以相对支撑座沿第二方向朝向或背离支撑座的主体部移动,实现脚踏主体沿第二方向的前后移动,使脚踏主体能够在第二方向上靠近或远离操作者。丰富脚踏主体在支撑座上相对位置的灵活性,脚踏主体及脚踏组件能够相对支撑座沿第一方向上下移动,脚踏主体还能够相对支撑座沿第二方向前后移动,能够更好的满足操作者对脚踏按钮位置的调节需求,显著的提升操作舒适度,进一步提升脚踏操控装置及手术机器人的操控体验。
27、在一种可能的实现方式中,活动件上设有沿第二方向延伸的导轨,脚踏主体上设有与导轨滑动配合的滑件,使脚踏主体可以通过滑件与活动件滑动配合。
28、这样,使脚踏主体可以通过滑件沿导轨的延伸方向滑动,实现脚踏主体相对活动件(支撑座)沿第二方向上的前后移动。导轨够对滑件及脚踏主体沿第二方向的滑动起到限位导向作用,保证脚踏主体沿第二方向的前后滑动。
29、在一种可能的实现方式中,活动件内部具有容纳腔,容纳腔沿第一方向上相对的两侧壁中至少一个上具有导轨,滑件位于容纳腔内。
30、活动件面向脚踏主体的一侧具有避让口,脚踏主体面向活动件的一侧上设置固定件,固定件穿过避让口与滑件连接。
31、这样,通过简单的结构设计,使脚踏主体可以通过滑件在活动件的导轨上的滑动,制造成本相对较低。
32、在一种可能的实现方式中,活动件包括底壳和壳盖,壳盖设置在底壳上,壳盖和底壳围成容纳腔,避让口位于底壳上,壳盖和底壳相对的两面上分别具有导轨。
33、这样,在壳盖和底壳相对两面上均设置导轨,利于提升滑件与导轨的配合牢度,保证脚踏主体沿第二方向滑动的稳定性和可靠性。并且,将活动件拆分为底壳和壳盖两个构件,使底壳和壳盖围成容纳腔,可以便于两个导轨的成型,且便于实现滑件在活动件的容纳腔内的装配,降低生产及装配难度。
34、在一种可能的实现方式中,脚踏操控装置还包括第二驱动组件,第二驱动组件用于驱动脚踏主体沿第二方向滑动。
35、这样,通过控制第二驱动组件,就能够使脚踏主体实现沿第二方向的前后移动,提升自动化设计,便于操控实现。
36、在一种可能的实现方式中,第二驱动组件包括第二驱动件和伸缩件,伸缩件可沿第二方向伸缩。伸缩件的一端与脚踏主体连接,伸缩件的另一端与支撑座可转动配合。
37、第二驱动件设置在脚踏组件上,第二驱动件与伸缩件连接,第二驱动件用于驱动伸缩件伸缩。
38、这样,第二驱动件能够驱动伸缩件沿第二方向伸缩,进而通过伸缩件可以推拉脚踏主体,使脚踏主体相对支撑座发生沿第二方向的滑动,实现脚踏主体沿第二方向的前后移动。
39、在一种可能的实现方式中,伸缩件包括若干伸缩单元,每个伸缩单元包括交叉铰接的两个连接杆。其中,当伸缩单元为多个时,多个伸缩单元沿第二方向依次排列,相邻的两个伸缩单元间铰接连接,位于伸缩件两端的伸缩单元的连接杆分别与脚踏主体、支撑座连接。
40、这样,两个连接杆的相对转动能够改变伸缩单元的总长度、两个伸缩单元间连接杆的相对转动可以改变伸缩件整体的总长度,进而可以实现伸缩单元沿第二方向上的伸缩,从而可以推拉脚踏主体相对支撑座沿第二方向前后移动。结构设计简单,便于实现且利于降低制造成本。
41、在一种可能的实现方式中,脚踏操控装置还包括第一装配杆和第二装配杆,第一装配杆设置在支撑座上,第一装配杆上套设两个第一装配件,第一装配件可相对第一装配杆转动,位于伸缩件一端的两个连接杆分别与第一装配件连接。
42、这样,位于伸缩件一端的伸缩单元的两个连接杆的一端分别与两个第一装配件连接,进而通过第一装配件实现与第一装配杆的转动配合,使两个连接杆(伸缩件)可以相对支撑座发生绕第一装配件的转动。如当脚踏组件及脚踏主体发生沿第一方向的上下升降移动时,脚踏主体带动伸缩件升降移动,使伸缩件一端的两连接杆相对第一装配杆(支撑座)转动,保证脚踏主体沿第一方向的升降移动。
43、第二装配杆转动设置在脚踏主体上,第二装配杆上套设两个第二装配件,第一装配杆的外表面上具有外螺纹,第二装配件的内表面上具有与外螺纹配合的内螺纹,且两个第二装配件的内螺纹螺旋方向相反,位于伸缩件另一端的两个连接杆与第二装配件连接。第二驱动件与第二装配杆连接,第二驱动件用于带动第二装配杆转动。
44、这样,通过第二驱动件带动第二装配杆转动,使与第二装配杆螺纹配合的第二装配件发生相对第二装配杆的转动,转动的同时沿第二装配杆的延伸方向移动。由于两个第二装配件的内螺纹螺旋方向相反,使两个第二装配件相对第二装配杆转动的同时,沿第二装配杆相背或相向移动。进而通过两个第二装配件带动两个连接杆的一端相背或相向移动,使两个连接杆在铰接的位置处发生相对转动,从而实现伸缩单元(伸缩件)沿第二方向的伸缩。
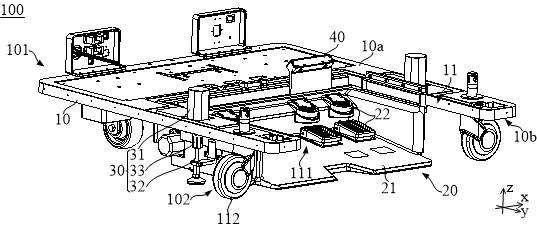
45、本技术的第二方面提供一种手术机器人,包括移动基座和上述任一的脚踏操控装置,脚踏操控装置位于移动基座上。
46、本技术的构造以及它的其他发明目的及有益效果,将会通过结合附图而对具体实施方式的描述而更加明显易懂。
本文地址:https://www.jishuxx.com/zhuanli/20240819/275564.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表