一种具有语音提醒功能的医疗康复机器人的制作方法
- 国知局
- 2024-08-19 14:24:46
本发明涉及康复机器人,具体为一种具有语音提醒功能的医疗康复机器人。
背景技术:
1、康复机器人作为医疗机器人的一个重要分支,它的研究贯穿了康复医学、生物力学、机械学、机械力学、电子学、材料学、计算机科学以及机器人学等诸多领域,已经成为了国际机器人领域的一个研究热点,目前,康复机器人的研究主要集中在康复机械手、医院机器人系统、智能轮椅、假肢和康复治疗机器等几个方面;
2、目前,康复机器人已经广泛地应用到康复护理、假肢和康复治疗等方面,这不仅促进了康复医学的发展,也带动了相关领域的新技术和新理论的发展,它们可以根据用户的不同要求提供,具有话音识别,语音合成,传感器的输入,手柄控制以及步进电机的输入等。
3、现有的康复机器人在正常行驶过程中,常常因遇到障碍而需要刹停操作,在康复机器人刹停过程中,随着制动距离的变短,此时康复机器人产生的惯性也随之增大,较大的惯性会对康复人员带来一定的影响,且易出现康复机器人倾倒,对康复人员造成二次伤害的情况。
4、针对现有问题,急需在原有的基础上进行创新。
技术实现思路
1、本发明的目的在于提供一种具有语音提醒功能的医疗康复机器人,以解决上述背景技术中提出的现有的康复机器人在正常行驶过程中,常常因遇到障碍而需要刹停操作,在康复机器人刹停过程中,随着制动距离的变短,此时康复机器人产生的惯性也随之增大,较大的惯性会对康复人员带来一定的影响,且易出现康复机器人倾倒,对康复人员造成二次伤害的情况。
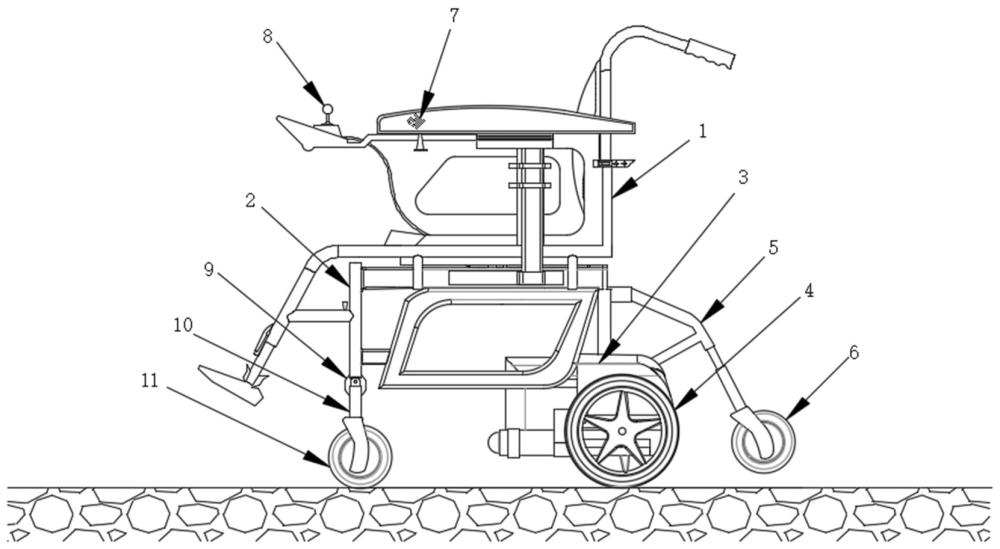
2、为实现上述目的,本发明提供如下技术方案:一种具有语音提醒功能的医疗康复机器人,包括承托架和安装架,所述承托架的底部设置有安装架;
3、还包括:
4、驱动箱体,安装于所述安装架的内侧,且驱动箱体的边侧安装有驱动轮,并且安装架的边侧设置有固定架,同时固定架的端部安装有辅助轮;
5、语音识别模块,安装于所述承托架的顶部,且语音识别模块的边侧设置有控制模块;
6、调控机构,设置于所述安装架的底部,且调控机构的底部设置有驱动模块,并且驱动模块的端部设置有前轮,所述调控机构用于调节驱动模块的倾斜角度,增加医疗康复机器人的行驶稳定性。
7、作为本发明所述具有语音提醒功能的医疗康复机器人的一种可选方案,其中:所述调控机构包括对接轴、转动齿轮、锁定锯齿片、液压杆,且对接轴的端部设置有转动齿轮,并且转动齿轮的边侧啮合连接有锁定锯齿片,同时锁定锯齿片的端部设置有液压杆。
8、作为本发明所述具有语音提醒功能的医疗康复机器人的一种可选方案,其中:所述对接轴与驱动模块之间为固定连接,且对接轴贯穿于承托架的内部,并且承托架与液压杆之间为螺栓固定。
9、作为本发明所述具有语音提醒功能的医疗康复机器人的一种可选方案,其中:所述承托架的外壁固定连接有滑动块,且滑动块的一侧设置有阻尼器,并且滑动块的另一侧设置有金属丝,所述金属丝的端部设置有收卷盘,且收卷盘的边侧设置有转动盘,并且转动盘的边侧设置有驱动电机,同时转动盘的外侧设置有刹车盘。
10、作为本发明所述具有语音提醒功能的医疗康复机器人的一种可选方案,其中:包括如下步骤:
11、首先通过控制模块启动驱动箱体带动驱动轮转动,实现让康复机器人在路面上运动;
12、通过获取康复机器人上安装的定位模块信息,配合ai模块和vslam导航模块,实现对前行路线自动规划;
13、获取康复机器人的状态信息和承托架上安装的激光雷达信息,通过中枢模块对激光雷达信息进行整合,对前方障碍物状态进行判定,优化康复机器人的最佳制动,并利用语音模块进行提醒。
14、作为本发明所述具有语音提醒功能的医疗康复机器人的一种可选方案,其中:获取康复机器人的状态信息包括:驱动轮转速信息、驱动轮胎压信息和平衡状态信息;
15、若康复机器人驱动轮的转速信息为零,此时康复机器人处于静止状态;
16、若康复机器人驱动轮的转速信息不为零,此时康复机器人处于运动状态;
17、胎压信息的判定包括:
18、若康复机器人的左驱动轮的胎压信息等于右驱动轮的胎压信息,此时康复机器人处于正常状态;
19、若康复机器人的左驱动轮的胎压信息大于右驱动轮的胎压信息,此时康复机器人处于向右偏斜状态,并通过语音模块进行提醒;
20、若康复机器人的左驱动轮的胎压信息小于右驱动轮的胎压信息,此时康复机器人处于向左偏斜状态,并通过语音模块进行提醒;
21、其中,平衡状态信息采用六轴陀螺仪进行判定。
22、作为本发明所述具有语音提醒功能的医疗康复机器人的一种可选方案,其中:前方障碍物状态判定包括:
23、当康复机器人的前方出现障碍物时,通过激光雷达获取障碍物的位置信息,将获取障碍物的位置信息命名为第一障碍位置;
24、间隔1.5s后再次通过激光雷达获取障碍物的位置信息,将其命名为第二障碍位置;
25、若第一障碍位置与第二障碍位置没有产生改变,此时障碍物处于静止状态;
26、若第一障碍位置与第二障碍位置出现改变,此时障碍物处于运动状态,并对障碍物的运动速度进行判定;
27、其中,障碍物的运动速度判定包括:
28、获取驱动轮的转速、第一障碍位置和第二障碍位置;
29、康复机器人运动距离=驱动轮转速*1.5
30、障碍物的运动距离=第二障碍位置到康复机器人运动距离+1.5s时康复机器人运动距离-第一障碍位置到初始康复机器人运动距离;
31、障碍物运动速度=障碍物的运动距离/1.5。
32、作为本发明所述具有语音提醒功能的医疗康复机器人的一种可选方案,其中:获取障碍物的位置信息和障碍物的运动速度,计算康复机器人与障碍物碰撞时的时间;
33、重度刹车:康复机器人2s内停止运动;
34、中度刹车:康复机器人2s-4s内停止运动;
35、轻度刹车:康复机器人4s-8s内停止运动;
36、根据障碍物碰撞时的时间判定刹车力度;
37、当康复机器人与障碍物碰撞时的时间在4s-8s内,此时中枢模块控制语音模块,发出前方存在障碍物,并对驱动轮采取制动措施。
38、作为本发明所述具有语音提醒功能的医疗康复机器人的一种可选方案,其中:当康复机器人与障碍物碰撞时的时间在2s-4s内,此时中枢模块控制语音模块,发出前方存在障碍物;
39、控制调控机构中的锁定锯齿片带动转动齿轮和对接轴转动,让驱动模块和前轮向外转动20°;
40、控制驱动模块对前轮与驱动模块之间长度调节,保持承托架坐垫处于水平状态,提高康复机器人刹车稳定性;
41、解除刹车盘对转动盘和收卷盘的锁定,让承托架对阻尼器进行挤压,实现对刹车产生的外力进行缓冲;
42、康复机器人静止后,对承托架和安装架的位置进行复位,并锁定。
43、作为本发明所述具有语音提醒功能的医疗康复机器人的一种可选方案,其中:当康复机器人与障碍物碰撞时的时间在2s内,此时中枢模块控制语音模块,发出前方存在障碍物;
44、控制调控机构中的锁定锯齿片位置调控,让驱动模块和前轮向外转动45°;
45、控制驱动模块对前轮与驱动模块之间长度调节,让承托架坐垫处于前仰状态,提高康复机器人刹车稳定性同时让重心向后移动;
46、解除刹车盘对收卷盘的锁定,让承托架在安装架2上滑动,并对阻尼器进行挤压,实现对刹车产生的外力进行缓冲;
47、康复机器人静止后,对承托架和安装架的位置进行复位,并锁定。
48、与现有技术相比,本发明的有益效果是:
49、1、该一种具有语音提醒功能的医疗康复机器人,通过对到障碍物的位置位置和速度进行获取,实现对障碍物到康复机器人之间的间距进行精确测算,并根据障碍物到康复机器人之间的间距选取最优的制动方式,并根据不同的制动方式采取不同的调控方式,实现对制动产生惯性进行缓冲,降低制动惯性对康复人员造成的损伤。
本文地址:https://www.jishuxx.com/zhuanli/20240819/275118.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表