压力自适应控制方法、装置及相关设备与流程
- 国知局
- 2024-08-22 14:36:32
本发明属于真空压力控制领域,特别涉及一种压力自适应控制方法、装置及相关设备。
背景技术:
1、真空蝶阀是半导体加工、刻蚀工艺等高端制造设备的关键核心零部件,根据目标需求实现腔体气路管道的开通、关闭、流量控制、调节压力等功能,具有稳定性及可靠性高、响应速度快、压力控制精度高等特点,在半导体、新型显示、新材料及太阳能领域具有广泛应用。
2、现有的基于真空蝶阀开度的腔体压力控制方法一般为pid控制算法,现有的基于pid控制算法的控制过程一般为基于系统建立数学模型,基于数学模型进行参数整定,并基于各参数生成控制信号以进行腔体压力控制。但pid控制算法的控制精度依赖于根据系统建立的数学模型的精度,因此对于高非线性和高时变性的真空蝶阀腔体压力控制系统而言,难以基于该压力控制系统建立准确的数学模型,继而在将pid控制算法应用于该压力控制系统时,在基于不够精确的数学模型整定参数后,基于参数生成的控制信号无法快速且准确地将压力控制到预设值,难以达到理想的控制效果。
3、因此,现有技术有待改进和发展。
技术实现思路
1、本技术的目的在于提供一种压力自适应控制方法、装置及相关设备,旨在解决pid控制算法在应用于高非线性和高时变性的真空蝶阀腔体压力控制系统时,难以达到理想的控制效果的问题。
2、第一方面,本技术提供一种压力自适应控制方法,用于通过电机控制连接腔体的管道上的蝶阀的开度以调整腔体压力,压力自适应控制方法包括以下步骤:
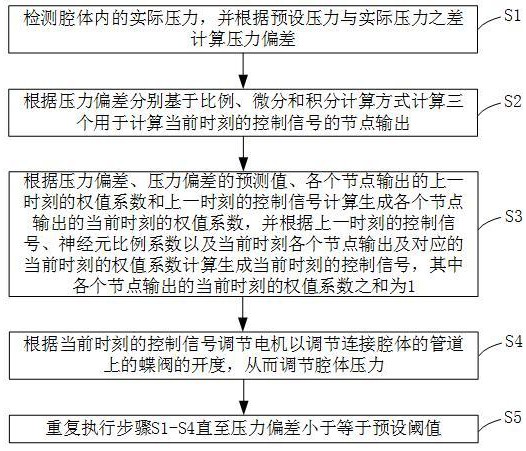
3、s1.检测腔体内的实际压力,并根据预设压力与实际压力之差计算压力偏差;
4、s2.根据压力偏差分别基于比例、积分和微分计算方式计算三个用于计算当前时刻的控制信号的节点输出;
5、s3.根据压力偏差、压力偏差的预测值、各个节点输出的上一时刻的权值系数和上一时刻的控制信号计算生成各个节点输出的当前时刻的权值系数,并根据上一时刻的控制信号、神经元比例系数以及当前时刻各个节点输出及对应的当前时刻的权值系数计算生成当前时刻的控制信号,其中各个节点输出的当前时刻的权值系数之和为1;
6、s4.根据当前时刻的控制信号调节电机以调节连接腔体的管道上的蝶阀的开度,从而调节腔体压力;
7、s5.重复执行步骤s1-s4直至压力偏差小于等于预设阈值。
8、本技术的压力自适应控制方法,能使各个权值系数基于上一时刻的腔体压力调节情况,当前时刻的腔体压力以及当前时刻相对于上一时刻的压力变化情况自适应调节,从而实现腔体压力调节方向和调节幅度的自适应控制,因此本技术能够应对真空蝶阀腔体压力控制系统中高非线性和高时变性特点,生成控制信号以迅速且准确地将腔体压力调节至预设压力;并且本技术自适应调节三个节点输出的权值系数,在腔体压力因其他因素影响出现预期外的变化时也能对腔体压力调节方向和调节幅度进行自适应控制,以使腔体压力朝预设压力不断逼近,稳定性强且灵活性高。
9、进一步地,各个节点输出的当前时刻的权值系数的计算公式为:
10、w1(k)=w1(k-1)+ηpe(k)u(k-1)[2e(k)-e(k-1)],k≥2;
11、w2(k)=w2(k-1)+ηie(k)u(k-1)[2e(k)-e(k-1)],k≥2;
12、w3(k)=w3(k-1)+ηde(k)u(k-1)[2e(k)-e(k-1)],k≥2;
13、
14、其中k为当前时刻,x1(k)、x2(k)和x3(k)为当前时刻的三个节点输出,x1(k-1)、x2(k-1)和x3(k-1)为上一时刻的三个节点输出,w1(k)、w2(k)和w3(k)分别为用于计算x1(k)、x2(k)和x3(k)对应的当前时刻的权值系数的中间变量,w1(k-1)、w2(k-1)和w3(k-1)分别为用于计算x1(k-1)、x2(k-1)和x3(k-1)对应的上一时刻的权值系数的中间变量,ηp、ηi和ηd分别为w1(k)、w2(k)和w3(k)对应的学习速率,e(k)为当前时刻的压力偏差,e(k-1)为上一时刻的压力偏差,u(k-1)为上一时刻的控制信号,w’i(k)为第i个节点输出的当前时刻的权值系数,i=1,2,3,2e(k)-e(k-1)为压力偏差的预测值,并且在k=2时,u(k-1)为0,且w1(k-1)、w2(k-1)和w3(k-1)为大于0的预设值。
15、在该实施方式中,本技术在调节过程中基于压力偏差、压力偏差的预测值以及上一时刻的控制信号选择更倾向的腔体压力调节方式,并基于该调节方式的调节特点对腔体压力调节过程进行优化。
16、进一步地,当前时刻的控制信号的计算公式为:
17、u(k)=u(k-1)+k∑3i=1w’i(k)xi(k),k≥2;
18、其中u(k)为当前时刻的控制信号,k为神经元比例系数。
19、在该实施方式中,本技术的压力自适应控制方法,能基于微分调节、比例调节和积分调节生成控制信号,从而能根据微分调节、比例调节和积分调节的特点对腔体压力进行迅速且准确的调节。
20、进一步地,三个节点输出的计算公式分别为:
21、x1(k)=e(k)-e(k-1),k≥2;
22、x2(k)=e(k),k≥2;
23、x3(k)=e(k)-2e(k-1)+e(k-2),k≥2;
24、其中k为当前时刻,x1(k)、x2(k)和x3(k)分别为三个节点输出,e(k)为当前时刻的压力偏差,e(k-1)为上一时刻的压力偏差,e(k-2)为上上一时刻的压力偏差,并且在k=2时e(k-2)为0。
25、第二方面,本技术提供一种压力自适应控制装置,用于通过电机控制连接腔体的管道上的蝶阀的开度以调整腔体压力,压力自适应控制装置包括:
26、压力检测模块,用于检测腔体内的实际压力,并根据预设压力与实际压力之差计算压力偏差;
27、节点输出计算模块,用于根据压力偏差分别基于比例、积分和微分计算方式计算三个用于计算当前时刻的控制信号的节点输出;
28、控制信号计算模块,用于根据压力偏差、压力偏差的预测值、各个节点输出的上一时刻的权值系数和上一时刻的控制信号计算生成各个节点输出的当前时刻的权值系数,并根据上一时刻的控制信号、神经元比例系数以及当前时刻各个节点输出及对应的当前时刻的权值系数计算生成当前时刻的控制信号,其中各个节点输出的当前时刻的权值系数之和为1;
29、压力调节模块,用于根据当前时刻的控制信号调节电机以调节连接腔体的管道上的蝶阀的开度,从而调节腔体压力;
30、重复执行模块,用于重复运行压力检测模块、节点输出计算模块、控制信号计算模块和压力调节模块以重复执行各模块对应步骤直至压力偏差小于等于预设阈值。
31、本技术的一种压力自适应控制装置,能使各个权值系数基于上一时刻的腔体压力调节情况,当前时刻的腔体压力以及当前时刻相对于上一时刻的压力变化情况自适应调节,从而实现腔体压力调节方向和调节幅度的自适应控制,因此本技术能够应对真空蝶阀腔体压力控制系统中高非线性和高时变性特点,生成控制信号以迅速且准确地将腔体压力调节至预设压力;并且本技术自适应调节三个节点输出的权值系数,在腔体压力因其他因素影响出现预期外的变化时也能对腔体压力调节方向和调节幅度进行自适应控制,以使腔体压力朝预设压力不断逼近,稳定性强且灵活性高。
32、进一步地,各个节点输出的当前时刻的权值系数的计算公式为:
33、w1(k)=w1(k-1)+ηpe(k)u(k-1)[2e(k)-e(k-1)],k≥2;
34、w2(k)=w2(k-1)+ηie(k)u(k-1)[2e(k)-e(k-1)],k≥2;
35、w3(k)=w3(k-1)+ηde(k)u(k-1)[2e(k)-e(k-1)],k≥2;
36、
37、其中k为当前时刻,x1(k)、x2(k)和x3(k)为当前时刻的三个节点输出,x1(k-1)、x2(k-1)和x3(k-1)为上一时刻的三个节点输出,w1(k)、w2(k)和w3(k)分别为用于计算x1(k)、x2(k)和x3(k)对应的当前时刻的权值系数的中间变量,w1(k-1)、w2(k-1)和w3(k-1)分别为用于计算x1(k-1)、x2(k-1)和x3(k-1)对应的上一时刻的权值系数的中间变量,ηp、ηi和ηd分别为w1(k)、w2(k)和w3(k)对应的学习速率,e(k)为当前时刻的压力偏差,e(k-1)为上一时刻的压力偏差,u(k-1)为上一时刻的控制信号,w’i(k)为第i个节点输出的当前时刻的权值系数,i=1,2,3,2e(k)-e(k-1)为压力偏差的预测值,并且在k=2时, u(k-1)为0,且w1(k-1)、w2(k-1)和w3(k-1)为大于0的预设值。
38、进一步地,当前时刻的控制信号的计算公式为:
39、u(k)=u(k-1)+k∑3i=1w’i(k)xi(k),k≥2;
40、其中u(k)为当前时刻的控制信号,k为神经元比例系数。
41、进一步地,三个节点输出的计算公式分别为:
42、x1(k)=e(k)-e(k-1),k≥2;
43、x2(k)=e(k),k≥2;
44、x3(k)=e(k)-2e(k-1)+e(k-2),k≥2;
45、其中k为当前时刻,x1(k)、x2(k)和x3(k)分别为三个节点输出,e(k)为当前时刻的压力偏差,e(k-1)为上一时刻的压力偏差,e(k-2)为上上一时刻的压力偏差,并且在k=2时e(k-2)为0。
46、第三方面,本技术提供一种电子设备,包括处理器和存储器,存储器存储有处理器可执行的计算机程序,处理器执行计算机程序时,运行如上任一方法中的步骤。
47、第四方面,本技术提供一种存储介质,其上存储有计算机程序,计算机程序被处理器执行时运行如上任一方法中的步骤。
48、由上可知,本技术提供了一种压力自适应控制方法、装置及相关设备,其中本技术提供的压力自适应控制方法,能使各个权值系数基于上一时刻的腔体压力调节情况,当前时刻的腔体压力以及当前时刻相对于上一时刻的压力变化情况自适应调节,从而实现腔体压力调节方向和调节幅度的自适应控制,因此本技术能够应对真空蝶阀腔体压力控制系统中高非线性和高时变性特点,生成控制信号以迅速且准确地将腔体压力调节至预设压力;并且本技术自适应调节三个节点输出的权值系数,在腔体压力因其他因素影响出现预期外的变化时也能对腔体压力调节方向和调节幅度进行自适应控制,以使腔体压力朝预设压力不断逼近,稳定性强且灵活性高。
49、本技术的其他特征和优点将在随后的说明书阐述,并且,部分地从说明书中变得显而易见,或者通过实施本技术实施例了解。本技术的目的和其他优点可通过在所写的说明书、以及附图中所特别指出的结构来实现和获得。
本文地址:https://www.jishuxx.com/zhuanli/20240822/279237.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。