一种风电机的振动控制方法、装置、设备及存储介质与流程
- 国知局
- 2024-08-22 14:35:50
本技术涉及电数字数据处理,尤其涉及一种风电机的振动控制方法、装置、设备及存储介质。
背景技术:
1、风力发电是指把风的动能转为电能,风能是一种清洁无公害的可再生能源,风力发电通过风力带动风车叶片旋转,再透过增速机将旋转的速度提升,来促使发电机发电,且风力发电不需要使用燃料,也不会产生辐射或空气污染,是一种可再生的新能源。风力发电主要是通过风电机(风力发电机)将风能转换为机械功,机械功带动转子旋转,最终输出交流电。
2、其中,风轮是风电机的一个关键部件,在工作过程中受到强风负荷、沙粒冲刷、大气氧化和潮湿空气腐蚀等多种因素的影响,不可避免的会因为出现的气孔、裂缝、磨损、腐蚀等问题,其根本原因在于风电机的叶片或者塔筒在日常运行过程中由于风向变化、地质变化等因素而产生振动,随着叶片与风力共振或者其他振动源共振,使得叶片或者塔筒的振动幅度超过安全范围,进而导致风电机组叶片开裂、弯折、偏移、断裂等机械损坏。
3、目前,对于风电机的振动控制手段通常采用传统的半主动控制策略,主要体现在采用两个极端电流或电压对磁流变阻尼器进行冗余控制,导致磁流变阻尼器在不同电流下不能较好地发挥耗能减振的能力,导致磁流变阻尼器的非线性特性没有得到良好的发挥,且采用两个极端电流或电压去对磁流变阻尼器进行冗余控制不仅费电,且容易导致磁流变阻尼器使用寿命缩短。
技术实现思路
1、本技术的主要目的在于提供一种风电机的振动控制方法、装置、设备及存储介质,以解决现有技术中磁流变阻尼器采用冗余控制导致性能较差的问题。
2、为了实现上述目的,本技术提供了如下技术方案:
3、一种风电机的振动控制方法,所述风电机包括通过支撑座固定架设于预设区域内的风轮,所述风轮在竖直面转动以形成圆柱形的运动轨迹,所有风电机在预设位置上安装有至少一个磁流变阻尼器,所述风电机的振动控制方法包括:
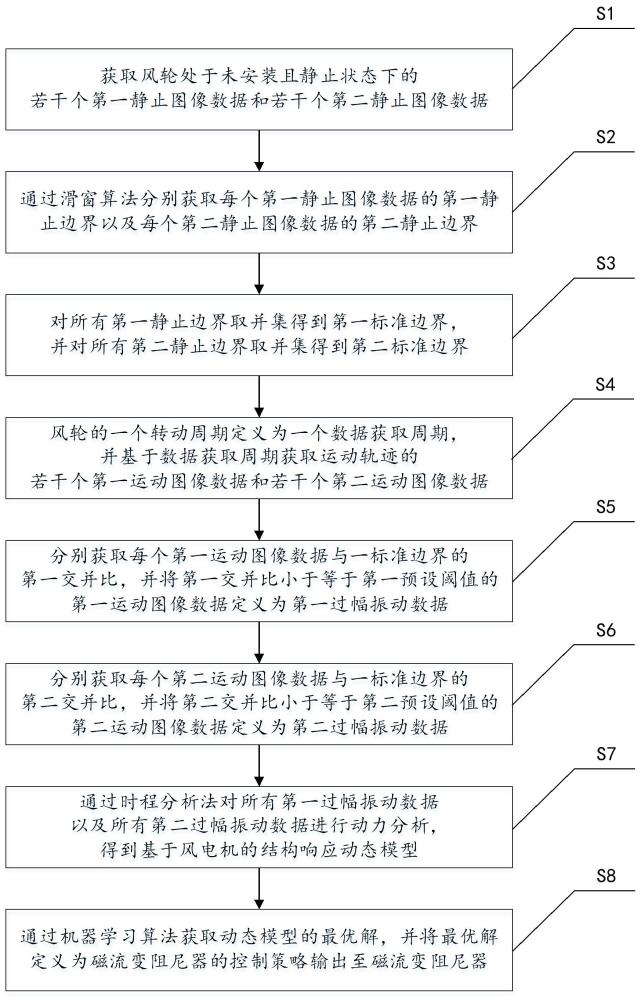
4、步骤s1,获取所述风轮处于未安装且静止状态下的若干个第一静止图像数据和若干个第二静止图像数据,其中所有第一静止图像数据均采集自所述圆柱形的其中一个底面、所有第二静止图像数据均采集自所述圆柱形的的侧面;
5、步骤s2,通过滑窗算法分别获取每个第一静止图像数据的第一静止边界以及每个第二静止图像数据的第二静止边界;
6、步骤s3,对所有第一静止边界取并集得到第一标准边界,并对所有第二静止边界取并集得到第二标准边界;
7、步骤s4,将所述风轮的一个转动周期定义为一个数据获取周期,并基于所述数据获取周期获取所述运动轨迹的若干个第一运动图像数据和若干个第二运动图像数据,其中所有第一运动图像数据均采集自所述圆柱形的其中一个底面、所有第二运动图像数据均采集自所述圆柱形的的侧面;
8、步骤s5,分别获取每个第一运动图像数据与所述一标准边界的第一交并比,并将第一交并比小于等于第一预设阈值的第一运动图像数据定义为第一过幅振动数据;
9、步骤s6,分别获取每个第二运动图像数据与所述一标准边界的第二交并比,并将第二交并比小于等于第二预设阈值的第二运动图像数据定义为第二过幅振动数据;
10、步骤s7,通过时程分析法对所有第一过幅振动数据以及所有第二过幅振动数据进行动力分析,得到基于所述风电机的结构响应动态模型;
11、步骤s8,通过机器学习算法获取所述动态模型的最优解,并将所述最优解定义为所述磁流变阻尼器的控制策略输出至所述磁流变阻尼器。
12、作为本技术的进一步改进,步骤s2,通过滑窗算法分别获取每个第一静止图像数据的第一静止边界以及每个第二静止图像数据的第二静止边界,包括:
13、步骤s21,分别将每个第一静止图像数据进行二值化处理,得到第一黑白图像数据,并通过预设密度的网格分别将每个第一黑白图像数据划分为若干个第一栅格;
14、步骤s22,分别获取每个第一栅格的颜色,并将颜色为黑的第一栅格赋值为0、颜色为白的第一栅格赋值为1;
15、步骤s23,将当前的第一栅格与周围的八个第一栅格定义为一个3×3窗口,并在所有第一栅格上以一个第一栅格为一步通过所述3×3窗口遍历所有第一栅格;
16、步骤s24,基于所有遍历结果删除所述3×3窗口中赋值全为1以及赋值全为0的第一栅格,将保留下来的第一栅格并定义为所述第一静止边界;
17、步骤s25,分别将每个第二静止图像数据进行二值化处理,得到第二黑白图像数据,并通过所述预设密度的网格分别将每个第二黑白图像数据划分为若干个第二栅格;
18、步骤s26,分别获取每个第二栅格的颜色,并将颜色为黑的第二栅格赋值为0、颜色为白的第二栅格赋值为1,并在所有第二栅格上以一个第二栅格为一步通过所述3×3窗口遍历所有第二栅格;
19、步骤s27,基于所有遍历结果删除所述3×3窗口中赋值全为1以及赋值全为0的第二栅格,并获取保留下来的第二栅格并定义为所述第二静止边界。
20、作为本技术的进一步改进,步骤s7,通过时程分析法对所有第一过幅振动数据以及所有第二过幅振动数据进行动力分析,得到基于所述风电机的结构响应动态模型,包括:
21、步骤s71,根据式(1)定义所述结构响应动态模型的动力平衡方程:
22、(1);
23、其中,为所述结构响应动态模型的质量矩阵;为所述结构响应动态模型的阻尼矩阵;为所述结构响应动态模型的刚度矩阵;为所述结构响应动态模型的加速度向量;为所述结构响应动态模型的速度向量;为所述结构响应动态模型的位移向量;为所述结构响应动态模型的外力向量;
24、步骤s72,根据式(2)定义所述阻尼矩阵:
25、(2);
26、其中,为基于所述质量矩阵的阻尼比;为基于所述刚度矩阵的阻尼比;为阻尼比常数;为所述结构响应动态模型的一阶自振频率;为所述结构响应动态模型的二阶自振频率;
27、步骤s73,将式(2)代入式(1)并通过逐步积分法求解所述动力平衡方程,得到所述结构响应动态模型。
28、作为本技术的进一步改进,步骤s8,通过机器学习算法获取所述结构响应动态模型的最优解,包括:
29、步骤s81,根据式(3)定义所述结构响应动态模型的干预平衡方程:
30、(3);
31、其中,为所述磁流变阻尼器的电流为时的阻尼力向量;
32、步骤s82,通过全局寻优算法获取所述力平衡方程最佳电流值,以使所述阻尼力向量抵消所述外力向量;
33、步骤s83,定义所述最佳电流值为所述磁流变阻尼器的输入电流;
34、步骤s84,输出所述输入电流至所述磁流变阻尼器,以形成基于所述磁流变阻尼器的控制策略。
35、作为本技术的进一步改进,步骤s82,通过全局寻优算法获取所述力平衡方程最佳电流值,以使所述阻尼力向量抵消所述外力向量,包括:
36、步骤s821,根据式(4)对所述最佳值定义若干个随机解,并定义所有随机解的寻优结果为所述阻尼力向量抵消所述外力向量;
37、(4);
38、其中,为所有随机解的集合,分别为每个随机解,为随机解的标号,为所有随机解的个数;为所有随机解的速度的集合,分别为每个随机解的速度;
39、步骤s822,初始化每个随机解的位置,并基于同一个随机解根据式(5)分别更新当前位置和当前速度:
40、(5);
41、其中,为第个随机解在第步的速度,为第个随机解在第步的速度惯性,为惯性系数,为第个随机解的自我认知表征,为第个随机解的社会认知表征;与均为学习因子,为预设取值范围的随机数,为第个随机解已获得的个体最优解,为第个随机解已获得的全局最优解;
42、步骤s823,根据所述式(5)分别迭代每个随机解预设次数,以更新每个以及每个;
43、步骤s824,分别判断每个相比于上一步迭代的第一差值是否小于等于第一预设适应阈值,若每个相比于上一步迭代的第一差值均小于等于第一预设适应阈值,则执行步骤s825;
44、步骤s825,分别判断每个相比于上一步迭代的第二差值是否小于等于第二预设适应阈值,若每个相比于上一步迭代的第二差值均小于等于第二预设适应阈值,则执行步骤s826;
45、步骤s826,判定已获得所述最佳值的最优解。
46、作为本技术的进一步改进,步骤s823,根据所述式(5)分别迭代每个随机解预设次数,以更新每个以及每个,包括:
47、步骤s8231,基于每一步迭代根据式(6)线性递减所述惯性系数一次:
48、(6);
49、其中,为第个随机解在第步优化后的惯性系数,为初始惯性系数,为当前的迭代步数,为最大迭代步数。
50、作为本技术的进一步改进,步骤s8,通过机器学习算法获取所述动态模型的最优解,并将所述最优解定义为所述磁流变阻尼器的控制策略输出至所述磁流变阻尼器,之后,包括:
51、步骤s10,基于所述数据获取周期获取控制后运动轨迹的若干个第三运动图像数据和若干个第四运动图像数据,其中所有第三运动图像数据均采集自所述圆柱形的其中一个底面、所有第四运动图像数据均采集自所述圆柱形的的侧面;
52、步骤s20,通过滑窗算法分别获取每个第三运动图像数据的第一运动边界以及每个第四运动图像数据的第二运动边界;
53、步骤s30,将所有第一运动边界取并集得到第一振动控制后边界,并将所有第二运动边界取并集得到第二振动控制后边界;
54、步骤s40,判断所述第一振动控制后边界与所述第一标准边界的交并比是否小于等于第三预设阈值,若所述第一振动控制后边界与所述第一标准边界的交并比小于等于所述第三预设阈值,则执行步骤s50;
55、步骤s50,判断所述第二振动控制后边界与所述第二标准边界的交并比是否小于等于第四预设阈值,若所述第二振动控制后边界与所述第二标准边界的交并比小于等于所述第四预设阈值,则执行步骤s60;
56、步骤s60,判定所述磁流变阻尼器处于异常状态,并根据所述异常状态生成人工干预请求;
57、步骤s70,发送所述人工干预请求至外部接收端。
58、为了实现上述目的,本技术还提供了如下技术方案:
59、一种风电机的振动控制装置,所述风电机的振动控制装置应用于如上述的风电机的振动控制方法,所述风电机的振动控制装置包括:
60、静止图像数据采集模块,用于获取所述风轮处于未安装且静止状态下的若干个第一静止图像数据和若干个第二静止图像数据,其中所有第一静止图像数据均采集自所述圆柱形的其中一个底面、所有第二静止图像数据均采集自所述圆柱形的的侧面;
61、静止边界提取模块,用于通过滑窗算法分别获取每个第一静止图像数据的第一静止边界以及每个第二静止图像数据的第二静止边界;
62、标准边界获取模块,用于对所有第一静止边界取并集得到第一标准边界,并对所有第二静止边界取并集得到第二标准边界;
63、运动图像数据采集模块,用于将所述风轮的一个转动周期定义为一个数据获取周期,并基于所述数据获取周期获取所述运动轨迹的若干个第一运动图像数据和若干个第二运动图像数据,其中所有第一运动图像数据均采集自所述圆柱形的其中一个底面、所有第二运动图像数据均采集自所述圆柱形的的侧面;
64、第一过幅振动数据定义模块,用于分别获取每个第一运动图像数据与所述一标准边界的第一交并比,并将第一交并比小于等于第一预设阈值的第一运动图像数据定义为第一过幅振动数据;
65、第二过幅振动数据定义模块,分别获取每个第二运动图像数据与所述一标准边界的第二交并比,并将第二交并比小于等于第二预设阈值的第二运动图像数据定义为第二过幅振动数据;
66、结构响应动态模型获取模块,用于通过时程分析法对所有第一过幅振动数据以及所有第二过幅振动数据进行动力分析,得到基于所述风电机的结构响应动态模型;
67、磁流变阻尼器控制输出模块,用于通过机器学习算法获取所述动态模型的最优解,并将所述最优解定义为所述磁流变阻尼器的控制策略输出至所述磁流变阻尼器。
68、为了实现上述目的,本技术还提供了如下技术方案:
69、一种电子设备,包括处理器、以及与所述处理器耦接的存储器,所述存储器存储有可被所述处理器执行的程序指令;所述处理器执行所述存储器存储的所述程序指令时实现如上述的一种风电机的振动控制方法。
70、为了实现上述目的,本技术还提供了如下技术方案:
71、一种存储介质,所述存储介质内存储有程序指令,所述程序指令被处理器执行时实现能够实现如上述的一种风电机的振动控制方法。
72、本技术通过获取风轮处于未安装且静止状态下的若干个第一静止图像数据和若干个第二静止图像数据,其中所有第一静止图像数据均采集自圆柱形的其中一个底面、所有第二静止图像数据均采集自圆柱形的的侧面;通过滑窗算法分别获取每个第一静止图像数据的第一静止边界以及每个第二静止图像数据的第二静止边界;对所有第一静止边界取并集得到第一标准边界,并对所有第二静止边界取并集得到第二标准边界;将风轮的一个转动周期定义为一个数据获取周期,并基于数据获取周期获取运动轨迹的若干个第一运动图像数据和若干个第二运动图像数据,其中所有第一运动图像数据均采集自圆柱形的其中一个底面、所有第二运动图像数据均采集自圆柱形的的侧面;分别获取每个第一运动图像数据与第一标准边界的第一交并比,并将第一交并比小于等于第一预设阈值的第一运动图像数据定义为第一过幅振动数据;分别获取每个第二运动图像数据与第一标准边界的第二交并比,并将第二交并比小于等于第二预设阈值的第二运动图像数据定义为第二过幅振动数据;通过时程分析法对所有第一过幅振动数据以及所有第二过幅振动数据进行动力分析,得到基于风电机的结构响应动态模型;通过机器学习算法获取动态模型的最优解,并将最优解定义为磁流变阻尼器的控制策略输出至磁流变阻尼器。本技术将静止状态下的风电机风轮的正面图像和侧面图像进行去噪处理并作为标准样本,为后续振动监测提供监测依据,避免将使用过程中的风电机风轮作为样本参考(已具有振动特性或损伤特性)而导致监测不准确,再通过获取后续使用过程中风电机风轮图像并与标准样本进行交并比的对比从而得到振动信息,分析风电机风轮的振动向量并通过全局寻优算法找到抵消向量所对应的最佳电流值,最后通过磁流变阻尼器实现振动控制。本技术提出的基于强化学习的风电机半主动振动控制方法通过“探索”的方式不断学习,获得磁流变阻尼器每一步最优动作所需要施加的电流值。在对风电机减振控制时,将学习得到的每一步最优的动作值输入磁流变阻尼器,从而让其提供最优的阻尼力对结构进行减振控制。该方法能够使磁流变阻尼器在每一步控制瞬时都处于最优的阻尼状态,提高磁流变阻尼器的对风电机的减振效果。
本文地址:https://www.jishuxx.com/zhuanli/20240822/279220.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表