一种基于多策略改进IGA-POA算法的散料无人天车调度方法
- 国知局
- 2024-08-22 14:41:41
本发明涉及一种基于多策略改进iga-poa算法的散料无人天车调度方法,属于天车调度。
背景技术:
1、天车已经开始向智能化和设备协同化发展,无人天车应运而生且被广泛运用。无人天车通过引入自动化控制系统和先进的传感器技术,能够实现自主导航、自动装卸和智能调度等功能。无人天车调度是指在一定的约束条件下,使用自动化技术和智能控制系统将每个任务合理的分配给天车,在确保生产生产时间和生产效益的同时,保障整个调度过程的安全、有序进行。无人天车调度的主要目标是优化天车的工作流程,提高物流效率和准确性,并减少人为因素的干预,相比传统的天车调度,无人天车调度系统可以提高物流效率、降低成本、提高安全性和准确性,并具有较高的可扩展性和灵活性。
2、目前工业上的无人天车调度技术使用平面扫描装置获取散料堆的信息,人工规划任务区域,然后使用智能优化算法对整个调度过程进行优化求解最优值,得出最优调度策略。现今使用的散料堆信息获取方法精度差、细节缺失,无法对散料堆进行系统的任务划分,缺少智能化。同时无人天车调度技术使用的智能优化算法也普遍存在反应时间长、精度一般、结果不稳定等缺点,为企业添加了成本。
技术实现思路
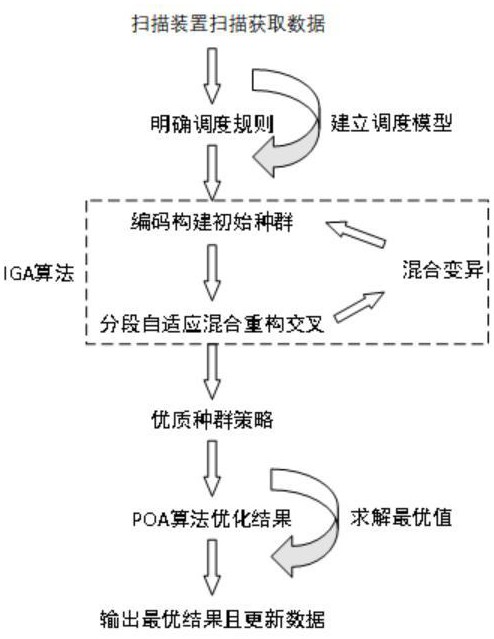
1、本发明采用以下的技术方案, 一种基于多策略改进iga-poa算法的散料无人天车调度方法,其特征在于,包括以下步骤:
2、step1:无人天车上的三维扫描装置扫描整个散料堆作业跨,实时获取散料堆的三维图像信息,使用自适应-各向异性高斯滤波器算法和网格规划算法处理信息数据,得到散料堆的二维平面任务划分图像;
3、step2:通过step1得到的散料堆二维平面任务划分图像,确定目标值、出料口、无人天车速度参数;明确优先级规则和避障规则;
4、step3:依据step1和step2的信息,对iga算法改进:将数据进行双层实数区间编码生成ts层和js层构成染色体,染色体组成初始种群,从种群中随机选取两个染色体p1和p2,分成三部分;组合这些部分创建两个新染色体c1和c2,其中部分内容基于适应度选择;对c1和c2修正重复和缺失的基因节点,并重新计算适应度值。
5、step4:对交叉后染色体进行混合变异,在ts层,随机标记两个基因节点ts1和ts2,将ts2节点插入到ts1前,相应ts层基因节点同步变化;在js层,执行贪婪组合变异:随机选择并替换两个基因节点位置js1和js2,或者选择最大适应度值节点js3,计算并替换到js2位置的最小适应度值天车序号;两种js层操作比例为0.5:0.5。
6、step5:对step3和step4处理后的染色体进行优质种群操作:混合父代和子代染色体,计算适应度并排序,将染色体划分为精英层和普通层,比例15%:85%;设置优质个体数n,保留所有精英层染色体,并从普通层选择相应数量的染色体;循环迭代iga算法,获得优质种群;将优质种群n作为鹈鹕算法的初始种群;
7、step6:提取优质种群化的初始种群,使用融合黄金正弦函数的poa算法处理种群,迭代处理得到符合目标值的最优解,即最优策略;
8、step7:执行本次调度的最优策略,并实时更新散料堆的三维图像数据。完成调度后,保存散料堆三维图像数据,为下次散料天车调度做准备。
9、进一步的,所述step1中,自适应-各向异性高斯滤波器算法核心数学模型如下:
10、其中 f(x,y)为平滑处理后每一个散料高度点在二维平面上的坐标; f w表示权重; f std表示局部标准差; f mean表示局部平均值; f norm表示局部归一化值; f表示最终结果;和表示高斯函数沿两个主方向的标准差; hθ为旋转偏角因子;为任务区域内所有散料点的高度平均值;表示幂值参数;表示稠密度参数;表示常数; ex和 ey表述坐标点上的方向梯度; n task表示调度任务区间划分。
11、本发明的有益效果:
12、1、使用三维扫描装置扫描整个散料堆作业跨,实时获取散料堆的三维图像进行点云三角剖分面重构,提取散料堆高度信息的方法相较与现有的技术而言,获取的信息量更加多,信息样式更加丰富,使操作人员更加直观的从整体上观察整个作业跨内散料堆的情况。使用改进的各向异性高斯滤波器算法对散料堆高度信息进行平滑处理和数值拟合,再使用网格规划算法处理数据,得到散料堆的二维平面任务划分图像,此方法相较于现有的技术而言,处理后的数据特征更加明显,精度和细节更高,同时算法会自动根据特征进行散料调度任务的划分,整体更加智能。
13、2、通过使用多策略改进的iga-poa算法对散料无人天车调度问题的求解,此方法相较与现有的技术,整体框架流程更加简单,精度和准确性更强,解决调度问题所花费的时间更加短,同时在抗干扰方向的鲁棒性和稳定性更好。
14、3、在成功进行一次散料无人天车调度后,算法会自动识别作业跨内散料堆的分布情况,自动更新散料堆三维图像的各种信息和拟合生成的散料堆任务划分图,为下次散料无人天车调度做准备,此方法是整个流程更加智能化,减少了人为因素的干扰。
技术特征:1.一种基于多策略改进iga-poa算法的散料无人天车调度方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于多策略改进iga-poa算法的散料无人天车调度方法,其特征在于,所述step1中,自适应-各向异性高斯滤波器算法核心数学模型如下:
3.根据权利要求1所述的一种基于多策略改进iga-poa算法的散料无人天车调度方法,其特征在于,所述step4中两种js层操作比例为0.5:0.5。
4.根据权利要求1所述的一种基于多策略改进iga-poa算法的散料无人天车调度方法,其特征在于,所述step5中,所述染色体划分为精英层和普通层,精英层和普通层的比例为15%:85%。
技术总结本发明公开一种基于多策略改进IGA‑POA算法的散料无人天车调度方法,属于天车调度技术领域。无人天车上的三维扫描装置扫描整个散料堆作业跨,实时获取散料堆的三维图像信息,使用自适应‑各向异性高斯滤波器算法和网格规划算法处理信息数据,得到散料堆的二维平面任务划分图像,将数据进行双层实数区间编码生成TS层和JS层构成染色体,染色体组成初始种群,对交叉后染色体进行混合变异,混合父代和子代染色体,计算适应度并排序。此方法整体框架流程更加简单,精度和准确性更强,解决调度问题所花费的时间更加短,同时在抗干扰方向的鲁棒性和稳定性更好。技术研发人员:王立亚,张春英,杨爱民,尹鑫,李敏,刘研科受保护的技术使用者:华北理工大学技术研发日:技术公布日:2024/8/20本文地址:https://www.jishuxx.com/zhuanli/20240822/279518.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表