用于高产能的嵌套式大气机械臂的制作方法
- 国知局
- 2024-08-22 14:43:57
背景技术:
1、半导体晶片处理工具可具有设备前端模块组(efem),用于将晶片从储存容器(例如前开式通用(或统一)晶舟(foup))传送至处理室。efem可以具有一或更多个晶片储存容器,以及一或更多个处理室装载端口,例如装载锁。装载锁是一个室,其将压力改变以匹配晶片在被往来传输时的压力。在一些实施方案中,装载锁可以具有保持晶片所用的单一放置位置。在一些其他实施方案中,装载锁可以具有保持多个晶片所用的多个晶片放置位置。在晶片处理期间,装载锁可以等待晶片被放置到这些晶片放置位置中的每一者中后,将装载锁加压。在大多数情况下,efem可以包括晶片搬运机器人,用以将晶片在储存容器、装载锁和/或其他位置之间传输。
技术实现思路
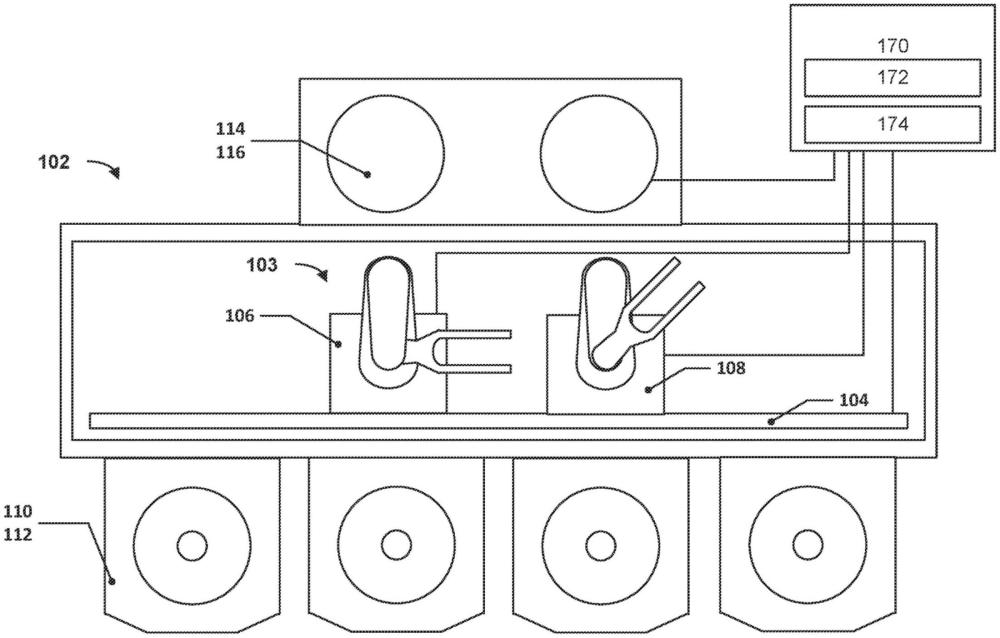
1、在一些实现方案中,可以提供一种用于在半导体处理工具中传输晶片的装置。该装置可以包括:第一晶片搬运机械臂;第二晶片搬运机械臂;以及线性平移系统,其被配置成与所述第一晶片搬运机械臂和所述第二晶片搬运机械臂对接。所述第一晶片搬运机械臂和所述第二晶片搬运机械臂各自具有相应的基部。所述装置可以被配置成致使所述基部独立地沿着水平的平移轴至少在嵌套配置与非嵌套配置之间来回移动。所述线性平移系统、所述第一晶片搬运机械臂和所述第二晶片搬运机械臂可以被配置成使得所述第一晶片搬运机械臂的所述基部能够被所述线性平移系统沿着所述平移轴移动并且通过第一区域和第二区域,但不通过第三区域;以及使得所述第二晶片搬运机械臂的所述基部能够被所述线性平移系统移动通过所述第二区域和所述第三区域,但不通过所述第一区域。所述第二区域介于所述第一区域与所述第三区域之间。
2、在所述装置的一些实现方案中,所述第一晶片搬运机械臂和所述第二晶片搬运机械臂各自还可以包括:相应的末端执行器;以及相应的两个或更多机械臂连杆,该相应的所述两个或更多机械臂连杆至少包括(a)相应的第一机械臂连杆,其具有相应的第一端和相应的第二端,其中相应的所述第一机械臂连杆的所述第一端经由相应的第一旋转接头而与相应的所述基部能旋转地连接,使得相应的所述第一机械臂连杆能够围绕相应的第一轴而相对于相应的所述基部旋转;以及(b)相应的第二机械臂连杆,其具有第一端和第二端,其中相应的所述第二机械臂连杆的所述第二端经由相应的第二旋转接头而与相应的所述末端执行器能旋转地连接,使得相应的所述末端执行器能够围绕相应的第二轴而相对于相应的所述第二机械臂连杆旋转。
3、在所述装置的一些实现方案中,所述第一晶片搬运机械臂的相应的所述基部和所述第二晶片搬运机械臂的相应的所述基部各自可以具有相应的竖直驱动机构,其中所述竖直驱动机构被配置成致使相应的所述末端执行器沿着与相应的所述第一轴平行的轴移动。
4、在所述装置的一些实现方案中,所述线性平移系统可以包括第一组线性引导件,且所述第一晶片搬运机械臂和所述第二晶片搬运机械臂两者都可以与所述第一组线性引导件能移动地连接。
5、在所述装置的一些实现方案中,所述线性平移系统可以具有第一组线性引导件和第二组线性引导件,所述第一晶片搬运机械臂可以与所述第一组线性引导件能移动地连接,而所述第二晶片搬运机械臂可以与所述第二组线性引导件能移动地连接。
6、在所述装置的一些实现方案中,所述第一晶片搬运机械臂的所述末端执行器的底表面可以面向所述第一晶片搬运机械臂的所述第二机械臂连杆的顶表面。
7、在所述装置的一些实现方案中,所述第二晶片搬运机械臂的所述末端执行器的顶表面可以面向所述第二晶片搬运机械臂的所述第二机械臂连杆的底表面。
8、在所述装置的一些实现方案中,所述第一晶片搬运机械臂的所述末端执行器的衬底支撑表面可以比所述第一晶片搬运机械臂的所述第一机械臂连杆的顶表面高出第一距离,并且所述第二晶片搬运机械臂的所述末端执行器的衬底支撑表面可以比所述第二晶片搬运机械臂的所述第一机械臂连杆的顶表面高出第二距离。所述第一距离与所述第二距离之间的差值可以为10mm±1mm。
9、在所述装置的一些实现方案中,每个晶片搬运机械臂可以具有相应的第二末端执行器。
10、在所述装置的一些实现方案中,所述装置还可以包括控制器,其中所述控制器具有一或更多个存储器设备,且所述一或更多个存储器设备与一或更多个处理器通信连接。
11、在所述装置的一些实现方案中,所述控制器可以被配置成致使所述第一晶片搬运机械臂和所述第二晶片搬运机械臂至少在第一配置与第二配置之间移动。在所述第一配置中,所述第一晶片搬运机械臂和所述第二晶片搬运机械臂可以被定位成使得所述第二晶片搬运机械臂的所述末端执行器位于所述第一晶片搬运机械臂的所述末端执行器的正上方,且所述第二晶片搬运机械臂的所述第一轴与所述第一晶片搬运机械臂的所述第一轴分隔开第一距离。在所述第二配置中,所述第一晶片搬运机械臂和所述第二晶片搬运机械臂可以被定位成使得所述第二晶片搬运机械臂的所述末端执行器与所述第一晶片搬运机械臂的所述末端执行器分隔开水平距离,且所述第二晶片搬运机械臂的所述第一轴与所述第一晶片搬运机械臂的所述第一轴分隔开第二距离,以及所述第二距离可以大于所述第一距离。
12、在所述装置的一些实现方案中,在所述第一配置中,所述第一晶片搬运机械臂的所述末端执行器的衬底支撑表面可以比所述第二晶片搬运机械臂的所述末端执行器的衬底支撑表面低10mm±1mm。
13、在所述装置的一些实现方案中,所述控制器可以被配置成致使所述线性平移系统将所述晶片搬运机械臂中的一者的相应的所述基部沿着所述平移轴移动,而所述晶片搬运机械臂中的另一者的相应的所述基部则相对于所述线性平移系统保持静止。
14、在所述装置的一些实现方案中,所述控制器可以被配置成致使所述线性平移系统将所述第一晶片搬运机械臂的相应的所述基部沿着所述平移轴且在第一方向中移动,以及致使所述线性平移系统将所述第二晶片搬运机械臂的相应的所述基部沿着所述平移轴在第二方向中移动。
15、在所述装置的一些实现方案中,所述第一方向和所述第二方向可以是同一方向。
16、在所述装置的一些实现方案中,当所述第一晶片搬运机械臂和所述第二晶片搬运机械臂沿着所述平移轴平移时,所述第一晶片搬运机械臂的所述第一轴和所述第二晶片搬运机械臂的所述第一轴可以保持分隔开第一间隔距离。
17、在所述装置的一些实现方案中,所述第一方向和所述第二方向可以是不同方向。
18、在所述装置的一些实现方案中,所述控制器可以被配置成致使所述第一晶片搬运机械臂从第一晶片放置位置拾取第一衬底,以及致使所述第二晶片搬运机械臂同时从第二晶片放置位置拾取第二衬底,所述第一晶片放置位置位于所述第二晶片放置位置的上方或下方。
19、在所述装置的一些实现方案中,所述控制器可以被配置成致使所述第一晶片搬运机械臂从第一晶片放置位置拾取第一衬底,以及致使所述第二晶片搬运机械臂同时从第二晶片放置位置拾取第二衬底,所述第二晶片放置位置与所述第一晶片放置位置间隔开水平距离。
20、在所述装置的一些实现方案中,所述控制器还可以被配置成致使所述第一晶片搬运机械臂将所述第一衬底放置在第三晶片放置位置处,以及致使所述第二晶片搬运机械臂同时将所述第二衬底放置在第四晶片放置位置处,其中所述第三晶片放置位置位于所述第四晶片放置位置的上方或下方。
21、在所述装置的一些实现方案中,所述控制器还可以被配置成致使所述第一晶片搬运机械臂将所述第一衬底放置在第三晶片放置位置处,以及致使所述第二晶片搬运机械臂同时将所述第二衬底放置在第四晶片放置位置处,其中所述第三晶片放置位置与所述第四晶片放置位置间隔开水平距离。
22、在所述装置的一些实现方案中,所述装置还可以包括三个或更多装载端口和两个或更多装载锁。所述三个或更多装载端口可以位于所述线性平移系统的第一侧上,所述两个或更多装载锁可以位于所述线性平移系统的与所述第一侧相对的第二侧上,且所述三个或更多装载端口中的每一者可以被配置成接收相应的前开式通用晶舟。
23、在所述装置的一些实现方案中,所述装置还可以包括两个或更多对准器,其中每个对准器位于相应的装载锁上方。
24、在所述装置的一些实现方案中,所述控制器还可以被配置成致使所述第一晶片搬运机械臂从第一前开式通用晶舟拾取第一衬底,以及致使所述第二晶片搬运机械臂同时从所述第一前开式通用晶舟拾取第二衬底。
25、在所述装置的一些实现方案中,所述控制器还可以被配置成致使所述第一晶片搬运机械臂从第一前开式通用晶舟拾取第一衬底,以及致使所述第二晶片搬运机械臂同时从第二前开式通用晶舟拾取第二衬底。
26、在所述装置的一些实现方案中,所述控制器还可以被配置成致使所述第一晶片搬运机械臂将所述第一衬底放置于第一装载锁中,以及致使所述第二晶片搬运机械臂同时将所述第二衬底放置于第二装载锁中。
27、在所述装置的一些实现方案中,所述控制器还可以被配置成致使所述第一晶片搬运机械臂将所述第一衬底放置于第一对准器上,以及致使所述第二晶片搬运机械臂同时将所述第二衬底放置于第二对准器上。
28、在所述装置的一些实现方案中,所述控制器还可以被配置成致使所述第一晶片搬运机械臂将第一衬底放置于装载锁中,以及致使所述第二晶片搬运机械臂同时将第二衬底放置于对准器上。
29、在所述装置的一些实现方案中,所述线性平移系统可以是基于连杆组的平移系统,所述基于连杆组的平移系统具有第一组连杆组和第二组连杆组,所述第一组连杆组连接且支撑所述第一晶片搬运机械臂的所述基部,而所述第二组连杆组连接且支撑所述第二晶片搬运机械臂的所述基部。
30、在所述装置的一些实现方案中,所述基于连杆组的平移系统可以具有基部,且每组连杆组可以至少具有(a)相应的第一连杆,其具有相应的第一端和相应的第二端,其中相应的所述第一连杆的所述第一端经由相应的第一旋转接头而与所述基于连杆组的平移系统的所述基部能旋转地连接,使得相应的所述第一连杆能够围绕相应的第一轴而相对于所述基于连杆组的平移系统的所述基部旋转;以及(b)相应的第二连杆,其具有第一端和第二端,其中相应的所述第二连杆的所述第一端与相应的所述第一连杆的所述第二端能旋转地连接,而相应的所述第二连杆的所述第二端经由相应的旋转接头而与所述晶片搬运机械臂中的相应一者的所述基部能旋转地连接,使得相应的所述晶片搬运机械臂和能够围绕相应的第二轴而相对于相应的所述第二连杆旋转。
31、在所述装置的一些实现方案中,所述基于连杆组的平移系统可以被配置成使得每个第二连杆的所述第二端被局限于沿着所述平移轴移动。
32、在所述装置的一些实现方案中,所述基于连杆组的平移系统可以被配置成使得每个第二连杆的所述第二端被局限于沿着平移平面移动,其中所述平移平面垂直于所述第一轴。
本文地址:https://www.jishuxx.com/zhuanli/20240822/279640.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。