一种基于可移动相机设备的高空摄像头内参标定方法与流程
- 国知局
- 2024-08-22 14:51:32
本发明涉及摄像头领域,尤其涉及一种基于可移动相机设备的高空摄像头内参标定方法。
背景技术:
1、高空摄像头是一种安装在较高位置的监控设备,它利用足够的高度,可实现大范围的精确监控。高空摄像头在多个领域都有广泛的应用,如城市消防监控、城市重点目标监控、城市治安监控、城市环保监控、森林消防监控、边境防卫监控、小区防卫监控及厂区监控等,总的来说,高空摄像头在现代社会中扮演着越来越重要的角色,为各类监控需求提供了有效的解决方案。
2、受限于摄像头的成像原理,其采集物体的信息都是二维平面位置信息,为了通过摄像头数据得到物体准确的三维空间位置信息,通常需要进行摄像头的内参标定,以便正确地捕捉和处理图像信息。
3、传统的摄像头内参标定方法有:
4、基于主动视觉的标定方法,这种标定方法通过主动系统控制摄像头做特定运动,利用控制平台控制摄像头发生特定的移动拍摄多组图像,然后依据图像信息和已知摄像头位移变化来求解摄像头内参。然而高空摄像头采用这种标定方法需要配备精准的控制平台,成本较高;
5、基于二维平面靶标的标定方法,这种方法依赖于一个具有已知几何特征的标定板(如棋盘格标定板),通过检测标定板上的角点,并利用这些角点在图像中的投影与其在物理空间中的位置关系,构建成像约束方程,最后通过解算这些约束方程,可以求得摄像头的内参。然而高空摄像头采用这种标定方法需要采用高精度的图像处理算法,且需要采集多幅不同角度和位置的靶标图像进行标定操作,过程更为繁琐,操作更为复杂。
技术实现思路
1、针对现有技术的不足,本发明的目的在于提供一种基于可移动相机设备的高空摄像头内参标定方法,包括以下步骤:
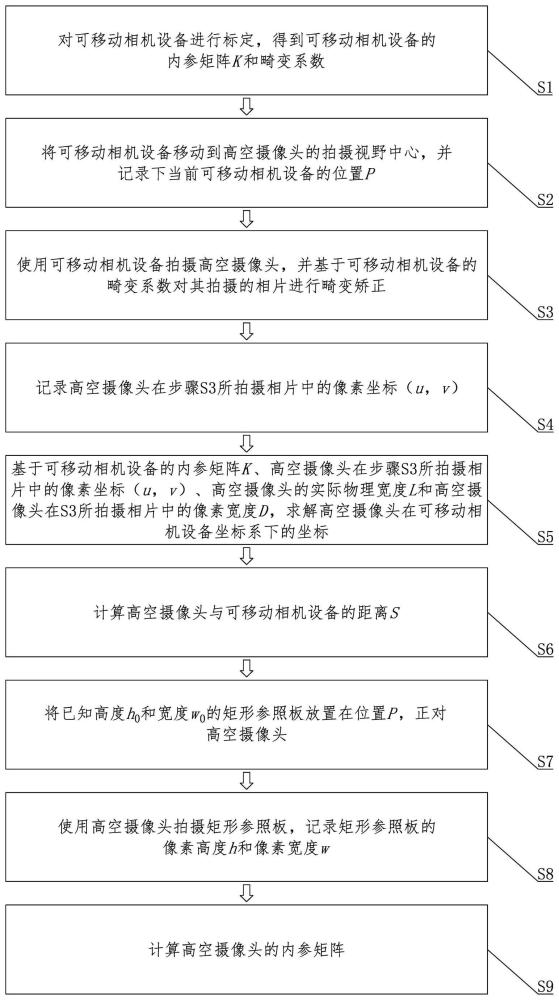
2、s1:对可移动相机设备进行标定,得到可移动相机设备的内参矩阵和畸变系数;
3、可移动相机设备的内参矩阵包含以下参数:归一化焦距(fx,fy),主点坐标(u0,v0),fx和fy是沿图像传感器x轴和y轴的像素焦距;畸变系数包括k1、k2、k3、p1和p2,其中k1、k2和k3为径向畸变系数,用于矫正图像边缘向内或向外弯曲的现象,p1和p2为切向畸变系数,用于矫正镜头和成像平面不完全平行造成的畸变。
4、s2:将可移动相机设备移动到高空摄像头的拍摄视野中心,并记录下当前可移动相机设备的位置p。
5、s3:使用可移动相机设备拍摄高空摄像头,并基于可移动相机设备的畸变系数对其拍摄的相片进行畸变矫正。
6、s4:记录高空摄像头在步骤s3所拍摄相片中的像素坐标(u,v)。
7、s5:基于可移动相机设备的内参矩阵高空摄像头在步骤s3所拍摄相片中的像素坐标(u,v)、高空摄像头的实际物理宽度l和高空摄像头在步骤s3所拍摄相片中的像素宽度d,求解高空摄像头在可移动相机设备坐标系下的坐标(xp,yp,zp),公式为:
8、
9、s6:计算高空摄像头与可移动相机设备的距离s,计算公式为:
10、
11、s7:将已知高度h0和宽度w0的矩形参照板放置在位置p,正对高空摄像头。
12、s8:使用高空摄像头拍摄矩形参照板,记录矩形参照板的像素高度h和像素宽度w;
13、当高空摄像头焦距可变时,还需记录焦距f,并计算高空摄像头于x、y方向上的一个像素在可移动相机设备感光板上的物理长度dx、dy,计算公式为:
14、
15、
16、s9:当高空摄像头不可变焦距时,内参矩阵k'的计算公式为:
17、
18、当高空摄像头可变焦距且焦距变化为f'时,内参矩阵k'的计算公式为:
19、
20、其中,cx和cy分别为高空摄像头拍摄的相片在水平方向和垂直方向上的像素总数。
21、进一步,本发明实施例所述可移动相机设备采用的是手机。
22、进一步,步骤s1所述主点为可移动相机设备的图像中心。
23、进一步,记录的可移动相机设备的位置p包括其位置和高度。
24、进一步,步骤s3所述使用可移动相机设备拍摄高空摄像头时使用的参数和步骤s1的参数相同,拍摄的相片能清楚分辨高空摄像头的轮廓。
25、进一步,步骤s4所述像素坐标(u,v)为高空摄像头在步骤s3所拍摄相片中的几何中心坐标。
26、进一步,步骤s7所述矩形参照板清晰可见且无遮挡,在高空摄像头的视角能测出其物理高度和物理宽度。
27、进一步,矩形参照板的摆放位置保持垂直于高空摄像头。
28、与现有技术相比,本发明的有益效果在于:
29、本发明不需要配备精准的控制平台控制高空摄像头发生特定位移求解内参,不需要其它专业定位和测距设备,也不需要人工布置标定板,利用可移动相机设备拍摄高空摄像头进行内参标定,可移动相机设备的选择多样,可以是手机或者相机,相比于其它专业设备,用户无需额外投资即可利用简易的设备进行高空摄像头的内参标定,降低了内参标定成本,同时避免了复杂的设备设置和大量的手动操作,简化了高空摄像头内参标定过程,操作更加简便。
技术特征:1.一种基于可移动相机设备的高空摄像头内参标定方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于可移动相机设备的高空摄像头内参标定方法,其特征在于,所述可移动相机设备采用的是手机。
3.根据权利要求1所述的一种基于可移动相机设备的高空摄像头内参标定方法,其特征在于,步骤s1所述主点为可移动相机设备的图像中心。
4.根据权利要求1所述的一种基于可移动相机设备的高空摄像头内参标定方法,其特征在于,记录的可移动相机设备的位置p包括其位置和高度。
5.根据权利要求1所述的一种基于可移动相机设备的高空摄像头内参标定方法,其特征在于,步骤s3所述使用可移动相机设备拍摄高空摄像头时使用的参数和步骤s1的参数相同,拍摄的相片能清楚分辨高空摄像头的轮廓。
6.根据权利要求1所述的一种基于可移动相机设备的高空摄像头内参标定方法,其特征在于,步骤s4所述像素坐标(u,v)为高空摄像头在步骤s3所拍摄相片中的几何中心坐标。
7.根据权利要求1所述的一种基于可移动相机设备的高空摄像头内参标定方法,其特征在于,步骤s7所述矩形参照板清晰可见且无遮挡,在高空摄像头的视角能测出其物理高度和物理宽度。
8.根据权利要求1所述的一种基于可移动相机设备的高空摄像头内参标定方法,其特征在于,步骤s7所述矩形参照板的摆放位置保持垂直于高空摄像头。
技术总结本发明涉及一种基于可移动相机设备的高空摄像头内参标定方法,该方法包括:对可移动相机设备进行标定,得到可移动相机设备的内参矩阵和畸变系数;将可移动相机设备移动到高空摄像头的拍摄视野中心,并记录下当前可移动相机设备的位置;使用可移动相机设备拍摄高空摄像头;记录高空摄像头在所拍摄相片中的像素坐标;求解高空摄像头在可移动相机设备坐标系下的坐标;计算高空摄像头与可移动相机设备的距离;将已知高度和宽度的矩形参照板放置在高空摄像头的拍摄视野中心,正对高空摄像头;使用高空摄像头拍摄矩形参照板;求解高空摄像头的内参矩阵。本发明相较于传统标定方法设备更简单,成本更低,优化了内参标定过程,操作更加简便。技术研发人员:徐林楠,王磊,李春江受保护的技术使用者:江西憶源多媒体科技有限公司技术研发日:技术公布日:2024/8/20本文地址:https://www.jishuxx.com/zhuanli/20240822/280151.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。