一种智能洗碗机器人系统及其实现方法
- 国知局
- 2024-08-22 15:05:32
本发明涉及机械自动化设备术领域,特别是属于一种智能洗碗机器人系统及其实现方法。
背景技术:
1、在当前社会背景下,智能家居产品的快速普及与科技进步密不可分。智能洗碗机器人作为一项创新家用电器备受瞩目,其设计背景紧扣当下社会需求。一方面,人们生活节奏加快、工作压力增大,传统洗碗方式耗时费力,智能洗碗机器人应运而生,通过智能化技术提高洗碗效率,助力个体平衡工作与生活。另一方面,随着人口老龄化加剧,智能洗碗机器人为老年人提供独立生活支持,提升生活品质。环保意识的提升也是设计背景之一,通过智能算法优化,节约水电资源,降低环境影响。此外,随着家庭结构变化和单身人群增多,智能洗碗机器人成为单身族群的得力助手,解决日常洗碗难题。
2、目前,在智能洗碗机器人的研究上仍存在较大的局限性。例如,发明专利号为cn108354564b的洗碗机器人,虽然提出了洗碗机器人的思路,但并没有公开具体的结构设计和实现方法。如何设计制作集识别、拿取、清洗、储存功能为一体的洗碗机器人,实现快速自动化清洁整理餐具是亟待研究解决的重要技术问题。
技术实现思路
1、本发明的目的即在于提供一种智能洗碗机器人系统及其实现方法,设计了一种集识别、拿取、清洗、储存功能为一体的智能洗碗机器人系统,以达到实现快速自动化清洁整理餐具的目的。
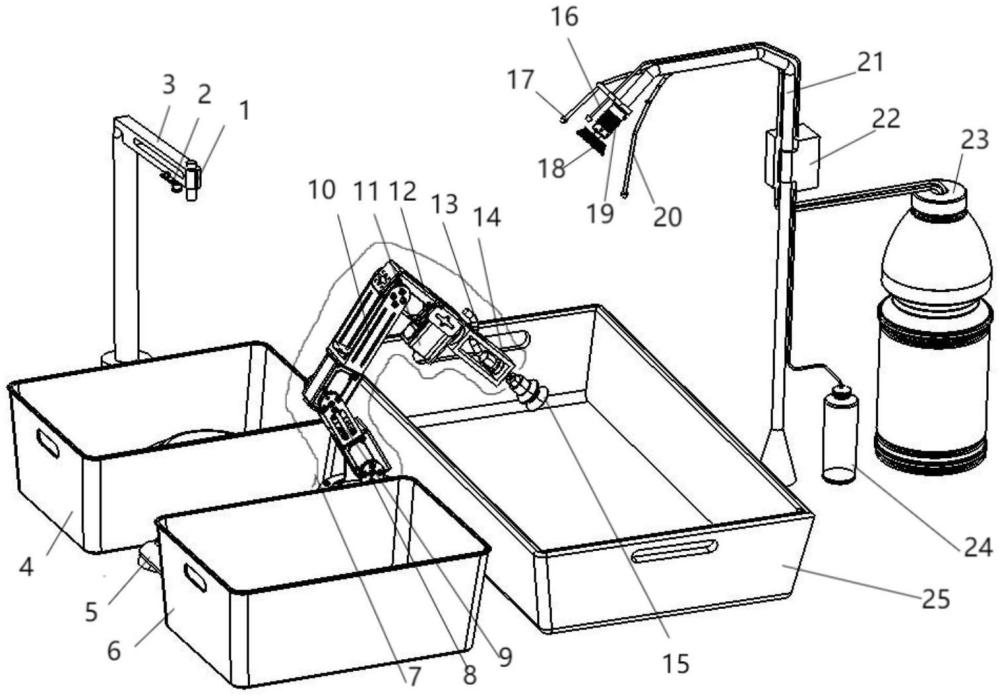
2、本发明所提供的一种智能洗碗机器人系统,其特征在于,包括待清洗工位、洗涤工位、已清洗工位以及机械臂,机械臂经待清洗工位、洗涤工位、已清洗工位实现待清洗餐具的抓取、洗涤、存放,
3、待清洗工位包括未清洁餐具储存箱以及设置在未清洁餐具储存箱上的餐具形位识别装置,所述的餐具形位识别装置包括第一支撑架,第一支撑架固定在未清洁餐具储存箱外侧,第一支撑架的端部安装有激光发射器与摄像头;
4、洗涤工位包括废水储存箱以及设置在废水储存箱上的餐具洗涤装置,所述的餐具洗涤装置包括第二支撑架、储水罐、储液罐,第二支撑架固定在废水储存箱外侧,第二支撑架的端部设置有海绵刷以及海绵驱动电机,在第二支撑架上还设置有水泵盒;储水罐连接两根出水管,两根出水管沿第二支撑架延伸至支撑架的端部,并形成第一喷水头和第二喷水头,储液罐连接出液管,出液管沿第二支撑架延伸至支撑架的端部形成洗涤剂喷头,第一喷水头、第二喷水头、洗涤剂喷头分别与水泵盒里面的第一抽水泵、第二抽水泵、洗涤剂泵相连接,所述的第一抽水泵和第二抽水泵、洗涤剂泵以及海绵驱动电机通过系统控制器控制;
5、机械臂包括有机械臂支撑座,在机械臂支撑座上以舵机与机械臂连杆配合安装成多自由度机械臂,且在机械臂的前端,连接吸盘组件;
6、已清洗工位包括已清洁餐具储存箱。
7、进一步的,机械臂布置在未清洁餐具储存箱及已清洁餐具储存箱的之间,相邻之间具有间隙,且在餐具洗涤状态下,所述的机械臂与海绵刷上下对应配合。
8、进一步的,机械臂支撑座上连接有机械臂底座,在机械臂底座中安装有舵机一,舵机一上连接底座连杆,舵机一带动底座连杆及上侧部分实现转动;自底座连杆,依次连接有舵机二、第一连杆、舵机三、第二连杆、舵机四、第三连杆、舵机五;在舵机五上连接有吸盘组件。
9、进一步的,吸盘组件包括末端支撑架,末端支撑架通过法兰固定在舵机五输出轴上,在末端支撑架中间位置,穿过有吸气管,且吸气管固定在末端支撑架的一端,并通过气管接头与连接杆连接,在连接杆上还套设有复位弹簧,所述的连接杆的端部连接吸盘;气泵提供负压,气泵连接有控制器,且所述的气泵的吸气口安装有三通,三通的一个端口与吸气管连接,一个端口设置有常闭单通电磁阀,且与大气相连通。
10、进一步的,激光发射器选用laserland 1668-650d-100-5vdc的红色网格激光器设备。
11、本发明所提供的一种智能洗碗机器人系统的实现方法,其特征在于,包括以下步骤:
12、a.机械臂运动至待清洗工位,对待清洗工位的餐具进行识别并抓取;
13、b.机械臂持待清洗餐具运动至洗涤工位,并配合洗涤工位的餐具洗涤装置,对餐具进行喷涂洗涤液、刷具擦拭、清水冲淋;
14、c.机械臂持洗涤后的餐具运动至已清洗工位,并将洗涤后的餐具进行存放,机械臂转至初始状态下的待机位置,等待执行下一轮操作,同时检查图像处理是否完毕,如有误则一直保持等待。
15、进一步的,在步骤a中,激光发射器发出红色网格线布于未清洗的餐具上,摄像头采集实时图片,并上传至上位机和微控制器,上位机和微控制器对网格激光线图像进行处理,包含图像的预处理、图像二值化、图像自适应处理与直线检测,通过激光线映射方格的大小面积计算获取高度信息,通过映射折线弯折的角度和获取到的折线畸变所呈现出几何形状的长宽比以及对角线数据计算碗具倾角,求解出餐具轮廓并获得机械臂末端抓取位置信息和高度信息。
16、进一步的,在步骤b中,机器臂带动餐具并提升,将餐具送到与海绵刷相对的预设位置,保持餐具正面与海绵刷接触,洗涤剂泵通电,向餐具上喷3秒洗涤剂,同时海绵驱动电机通电,海绵刷根据系统预设时间开始转动擦洗,与此同时,机械臂位置保持不动,餐具在舵机五的带动下做-180度到180度之间旋转;完成擦拭后,机械臂带动餐具后退,餐具与海绵刷脱离接触,海绵驱动电机断电停转,机械臂斜向前推进到第一喷水头的斜下方预设位置,机械臂在此位置保持预设时间内的静止不动,餐具在舵机五的带动下做-180度到180度之间旋转,第一抽水通电,第一喷水头向餐具上喷清水,完成碗具正面冲洗,待达到预设时间后,机械臂再次拉回到后方位置,第一喷水头停止喷水,同理,机械臂斜向前推进到第二喷水头的斜下方预设位置,完成冲洗碗具背面冲洗。
17、进一步的,在步骤c中,预设机械臂舵机一、舵机二、舵机三、舵机四、舵机五的旋转角度,根据餐具的不同材料,设置机械臂不同的下降释放位置,并将洗涤后的餐具进行存放。
18、本发明所提供的一种智能洗碗机器人系统及其实现方法,根据激光网格识别原理,自动识别餐具的大小、位置、厚度等信息,且通过机械臂以及机械臂末端的吸盘组件吸附餐具表面,实现吸取、放下等动作,使机器人更加智能化,相较于传统洗碗机器人,本发明涵盖了餐具清洁的识别、拿取、冲洗、存放等的完整操作流程,综上所述,本发明大大提高了餐具清洗的智能化,具有有效减轻人员的体力劳动负担的积极效果。
技术特征:1.一种智能洗碗机器人系统,其特征在于,包括待清洗工位、洗涤工位、已清洗工位以及机械臂,机械臂经待清洗工位、洗涤工位、已清洗工位实现待清洗餐具的抓取、洗涤、存放,
2.根据权利要求1所述的一种智能洗碗机器人系统,其特征还在于,机械臂布置在未清洁餐具储存箱及已清洁餐具储存箱的之间,相邻之间具有间隙,且在餐具洗涤状态下,所述的机械臂与海绵刷上下对应配合。
3.根据权利要求1所述的一种智能洗碗机器人系统,其特征还在于,机械臂支撑座上连接有机械臂底座,在机械臂底座中安装有舵机一,舵机一上连接底座连杆,舵机一带动底座连杆及上侧部分实现转动;自底座连杆,依次连接有舵机二、第一连杆、舵机三、第二连杆、舵机四、第三连杆、舵机五;在舵机五上连接有吸盘组件。
4.根据权利要求1所述的一种智能洗碗机器人系统,其特征还在于,吸盘组件包括末端支撑架,末端支撑架通过法兰固定在舵机五输出轴上,在末端支撑架中间位置,穿过有吸气管,且吸气管固定在末端支撑架的一端,并通过气管接头与连接杆连接,在连接杆上还套设有复位弹簧,所述的连接杆的端部连接吸盘;气泵提供负压,气泵连接有控制器,且所述的气泵的吸气口安装有三通,三通的一个端口与吸气管连接,一个端口设置有常闭单通电磁阀,且与大气相连通。
5.根据权利要求1所述的一种智能洗碗机器人系统,其特征还在于,激光发射器选用laserland 1668-650d-100-5vdc的红色网格激光器设备。
6.根据权利要求1-5中任意一项所述的一种智能洗碗机器人系统的实现方法,其特征还在于,包括以下步骤:
7.根据权利要求6所述的一种智能洗碗机器人系统的实现方法,其特征还在于,在步骤a中,激光发射器发出红色网格线布于未清洗的餐具上,摄像头采集实时图片,并上传至上位机和微控制器,上位机和微控制器对网格激光线图像进行处理,包含图像的预处理、图像二值化、图像自适应处理与直线检测,通过激光线映射方格的大小面积计算获取高度信息,通过映射折线弯折的角度和获取到的折线畸变所呈现出几何形状的长宽比以及对角线数据计算餐具倾角,求解出餐具轮廓并获得机械臂末端抓取位置信息和高度信息。
8.根据权利要求6所述的一种智能洗碗机器人系统的实现方法,其特征还在于,在步骤b中,机器臂带动餐具并提升,将餐具送到与海绵刷相对的预设位置,保持餐具正面与海绵刷接触,洗涤剂泵通电,向餐具上喷3秒洗涤剂,同时海绵驱动电机通电,海绵刷根据系统预设时间开始转动擦洗,与此同时,机械臂位置保持不动,餐具在舵机五的带动下做-180度到180度之间旋转;完成擦拭后,机械臂带动餐具后退,餐具与海绵刷脱离接触,海绵驱动电机断电停转,机械臂斜向前推进到第一喷水头的斜下方预设位置,机械臂在此位置保持预设时间内的静止不动,餐具在舵机五的带动下做-180度到180度之间旋转,第一抽水泵通电,第一喷水头向餐具上喷清水,完成碗具正面冲洗,待达到预设时间后,机械臂再次拉回到后方位置,第一喷水头停止喷水,同理,机械臂斜向前推进到第二喷水头的斜下方预设位置,完成冲洗碗具背面冲洗。
9.根据权利要求6所述的一种智能洗碗机器人系统的实现方法,其特征还在于,在步骤c中,预设机械臂舵机一、舵机二、舵机三、舵机四、舵机五的旋转角度,根据餐具的不同材料,设置机械臂不同的下降释放位置,并将洗涤后的餐具进行存放。
技术总结本发明涉及机械自动化设备术领域,特别是属于一种智能洗碗机器人系统及其实现方法。包括待清洗工位、洗涤工位、已清洗工位以及机械臂,机械臂经待清洗工位、洗涤工位、已清洗工位实现待清洗餐具的抓取、洗涤、存放,待清洗工位包括未清洁餐具储存箱以及设置在未清洁餐具储存箱上的餐具形位识别装置,洗涤工位包括废水储存箱以及设置在废水储存箱上的餐具洗涤装置,已清洗工位包括已清洁餐具储存箱,本发明大大提高了餐具清洗的智能化,具有有效减轻人员的体力劳动负担的积极效果。技术研发人员:王翀,李涛受保护的技术使用者:聊城大学技术研发日:技术公布日:2024/8/20本文地址:https://www.jishuxx.com/zhuanli/20240822/281106.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表