一种智能公路表面缺陷检测方法及系统与流程
- 国知局
- 2024-08-22 15:06:46
本发明涉及图像识别领域,特别是一种智能公路表面缺陷检测方法及系统。
背景技术:
1、伴随经济的发展,高速公路的里程在逐渐增加,因此针对高速公路的缺陷检测越来越重要,但是对路面的检测与养护要求也存在较大的差异。常见的高速公路路面病害有裂缝、龟裂、沉陷、车辙等,其中以路面裂缝病害较为突出。路面裂缝以表面裂缝、内部裂缝以及疲劳裂缝为主,若裂缝问题得不到及时处理,可能引起高速公路路基水毁、沉陷等病害,降低路面的使用性能,无法保证车辆行驶的安全。因此如何利用人工智能技术针对高速公路中的缺陷进行检测,从而提升公路的养护效率,从而保障路面的使用性能,保证车辆行驶的安全性。是现阶段丞待解决的技术问题。
技术实现思路
1、本发明的目的是为了解决上述问题,设计了一种智能公路表面缺陷检测方法及系统。
2、实现上述目的本发明的技术方案为,进一步,在一种智能公路表面缺陷检测方法中,所述公路表面缺陷检测方法包括以下步骤:
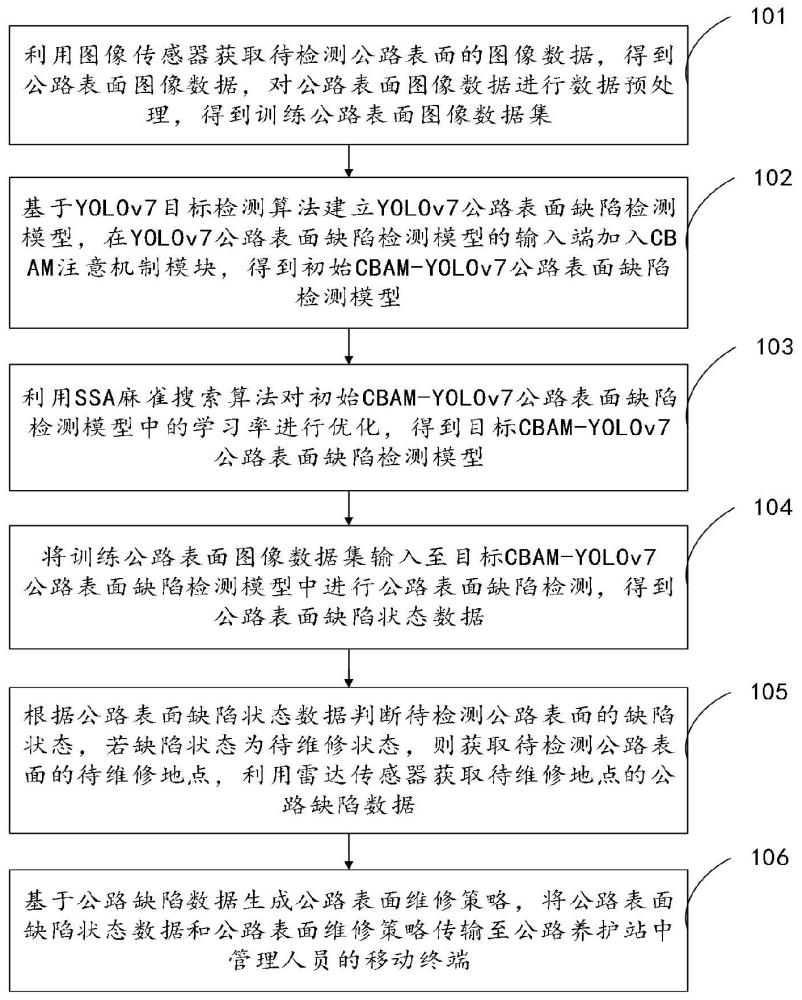
3、利用图像传感器获取待检测公路表面的图像数据,得到公路表面图像数据,对所述公路表面图像数据进行数据预处理,得到训练公路表面图像数据集;
4、基于yolov7目标检测算法建立yolov7公路表面缺陷检测模型,在所述yolov7公路表面缺陷检测模型的输入端加入cbam注意机制模块,得到初始cbam-yolov7公路表面缺陷检测模型;
5、利用ssa麻雀搜索算法对所述初始cbam-yolov7公路表面缺陷检测模型中的学习率进行优化,得到目标cbam-yolov7公路表面缺陷检测模型;
6、将所述训练公路表面图像数据集输入至所述目标cbam-yolov7公路表面缺陷检测模型中进行公路表面缺陷检测,得到公路表面缺陷状态数据;
7、根据所述公路表面缺陷状态数据判断所述待检测公路表面的缺陷状态,并获取所述待检测公路表面的待维修地点,利用雷达传感器获取待维修地点的公路缺陷数据;
8、基于所述公路缺陷数据生成公路表面维修策略,将所述公路表面缺陷状态数据和所述公路表面维修策略传输至公路养护站中管理人员的移动终端。
9、进一步,在上述一种智能公路表面缺陷检测方法中,所述利用图像传感器获取待检测公路表面的图像数据,得到公路表面图像数据,对所述公路表面图像数据进行数据预处理,得到训练公路表面图像数据集,包括:
10、利用图像传感器获取待检测公路表面的图像数据,得到公路表面图像数据,所述公路表面图像数据至少包括沥青路面数据、水泥路面数据、砂石路面数据、晴天路面数据、雨天路面数据、雪天路面数据、大雾天路面数据;
11、对所述公路表面图像数据进行数据增强处理,得到增强公路表面图像数据集,所述数据增强处理至少包括图像随机对比度变换、图像随机亮度变换、图像随机翻转、图像随机高斯噪声、图像随机饱和度变换;
12、对所述增强公路表面图像数据集中的异常值进行删除,对缺失值进行补充,得到完整公路表面图像数据集;
13、利用最大-最小归一化方法将所述完整公路表面图像数据集按照最大值和最小值进行缩放,将数据范围映射到[0,1]之间,得到训练公路表面图像数据集。
14、进一步,在上述一种智能公路表面缺陷检测方法中,所述基于yolov7目标检测算法建立yolov7公路表面缺陷检测模型,在所述yolov7公路表面缺陷检测模型的输入端加入cbam注意机制模块,得到初始cbam-yolov7公路表面缺陷检测模型,包括:
15、基于yolov7目标检测算法建立yolov7公路表面缺陷检测模型,所述yolov7公路表面缺陷检测模型至少包括图像特征提取层和图像特征处理层;
16、所述图像特征提取层利用cnn卷积神经网络提取图像数据的特征,得到特征图像数据;
17、所述图像特征处理层rnn利用循环神经网络和fcn全连接神经网络处理特征图像数据;
18、将wiou损失函数作为所述yolov7公路表面缺陷检测模型的损失函数,在所述yolov7公路表面缺陷检测模型的输入端加入cbam注意机制模块;
19、利用所述cbam注意机制模块将通道注意力机制和空间注意力机制进行串联,得到初始cbam-yolov7公路表面缺陷检测模型。
20、进一步,在上述一种智能公路表面缺陷检测方法中,所述利用ssa麻雀搜索算法对所述初始cbam-yolov7公路表面缺陷检测模型中的学习率进行优化,得到目标cbam-yolov7公路表面缺陷检测模型,包括:
21、设置所述ssa麻雀搜索算法的麻雀粒子、迭代次数、加入者、发现者和警觉者的比例;
22、将所述麻雀粒子作为所述初始cbam-yolov7公路表面缺陷检测模型的初始学习率,验证集的平均精度均值作为适应度;
23、对所述初始cbam-yolov7公路表面缺陷检测模型进行迭代训练,得到最优适应度麻雀位置,根据所述最优适应度麻雀位置更新发现者位置和加入者位置;
24、随机选择警觉者并更新位置,设定所述警觉者的数量占麻雀种群数量的20%;
25、生成下一代麻雀粒子位置参数,并依次输入至所述初始cbam-yolov7公路表面缺陷检测模型中进行迭代训练;
26、判断是否达到最大迭代次数,若达到,则程序结束输出结果,将输出结果设置为所述初始cbam-yolov7公路表面缺陷检测模型的超参数,得到目标cbam-yolov7公路表面缺陷检测模型。
27、进一步,在上述一种智能公路表面缺陷检测方法中,所述将所述训练公路表面图像数据集输入至所述目标cbam-yolov7公路表面缺陷检测模型中进行公路表面缺陷检测,得到公路表面缺陷状态数据,包括:
28、设置所述目标cbam-yolov7公路表面缺陷检测模型的评价指标为精确率、召回率、平均精度均值和每秒传输帧数;
29、将所述目标cbam-yolov7公路表面缺陷检测模型训练迭代参数设置为350,学习率的下限设定为0.001;
30、将所述训练公路表面图像数据集输入至所述目标cbam-yolov7公路表面缺陷检测模型中进行公路表面缺陷检测,得到公路表面缺陷状态数据;
31、所述公路表面缺陷状态数据至少包括公路表面有裂缝、公路表面有凸起、公里表面有坑槽、公里表面有车辙、公里表面松散脱皮、公里表面沉陷。
32、进一步,在上述一种智能公路表面缺陷检测方法中,所述根据所述公路表面缺陷状态数据判断所述待检测公路表面的缺陷状态,并获取所述待检测公路表面的待维修地点,利用雷达传感器获取待维修地点的公路缺陷数据,包括:
33、根据所述公路表面缺陷状态数据判断所述待检测公路表面的缺陷状态,若公里表面有坑槽和公路表面有车辙,则所述公路表面缺陷状态为缺陷状态为待维修状态;
34、获取所述待检测公路表面的待维修地点,将所述维修地点的地址信息发送至服务器中,根据所述地址信息生成无人机飞行指令;
35、根据所述无人机飞行指令对无人机进行实时控制,利用无人机中的雷达传感器获取待维修地点的公路缺陷数据。
36、进一步,在上述一种智能公路表面缺陷检测方法中,基于所述公路缺陷数据生成公路表面维修策略,将所述公路表面缺陷状态数据和所述公路表面维修策略传输至公路养护站中管理人员的移动终端,包括:
37、将所述公路缺陷数据输入至系统中,基于所述公路缺陷数据生成公路表面维修策略;
38、所述公路表面维修策略至少包括维修材料数量、维修人员数量、维修地点;
39、将所述公路表面缺陷状态数据和所述公路表面维修策略传输至公路养护站中管理人员的移动终端;
40、每隔24h获取1次维修后的公路表面图像数据,并基于目标cbam-yolov7公路表面缺陷检测模型中进行公路表面缺陷检测。
41、进一步,在一种智能公路表面缺陷检测系统中,所述系统包括以下模块:
42、数据获取模块,用于利用图像传感器获取待检测公路表面的图像数据,得到公路表面图像数据,对所述公路表面图像数据进行数据预处理,得到训练公路表面图像数据集;
43、模型建立模块,用于基于yolov7目标检测算法建立yolov7公路表面缺陷检测模型,在所述yolov7公路表面缺陷检测模型的输入端加入cbam注意机制模块,得到初始cbam-yolov7公路表面缺陷检测模型;
44、模型优化模块,用于利用ssa麻雀搜索算法对所述初始cbam-yolov7公路表面缺陷检测模型中的学习率进行优化,得到目标cbam-yolov7公路表面缺陷检测模型;
45、缺陷检测模块,用于将所述训练公路表面图像数据集输入至所述目标cbam-yolov7公路表面缺陷检测模型中进行公路表面缺陷检测,得到公路表面缺陷状态数据;
46、检测处理模块,用于根据所述公路表面缺陷状态数据判断所述待检测公路表面的缺陷状态,并获取所述待检测公路表面的待维修地点,利用雷达传感器获取待维修地点的公路缺陷数据;
47、检测维修模块,用于基于所述公路缺陷数据生成公路表面维修策略,将所述公路表面缺陷状态数据和所述公路表面维修策略传输至公路养护站中管理人员的移动终端。
48、进一步,在上述一种智能公路表面缺陷检测系统中,所述系统包括以下子模块:
49、建立子模块,用于基于yolov7目标检测算法建立yolov7公路表面缺陷检测模型,所述yolov7公路表面缺陷检测模型至少包括图像特征提取层和图像特征处理层;
50、特征提取子模块,用于所述图像特征提取层利用cnn卷积神经网络提取图像数据的特征,得到特征图像数据;
51、特征处理子模块,用于所述图像特征处理层rnn利用循环神经网络和fcn全连接神经网络处理特征图像数据;
52、函数子模块,用于将wiou损失函数作为所述yolov7公路表面缺陷检测模型的损失函数,在所述yolov7公路表面缺陷检测模型的输入端加入cbam注意机制模块;
53、得到子模块,用于利用所述cbam注意机制模块将通道注意力机制和空间注意力机制进行串联,得到初始cbam-yolov7公路表面缺陷检测模型。
54、进一步,在上述一种智能公路表面缺陷检测系统中,所述系统包括以下子模块:
55、判断子模块,用于根据所述公路表面缺陷状态数据判断所述待检测公路表面的缺陷状态,若公里表面有坑槽和公路表面有车辙,则所述公路表面缺陷状态为缺陷状态为待维修状态;
56、获取子模块,用于获取所述待检测公路表面的待维修地点,将所述维修地点的地址信息发送至服务器中,根据所述地址信息生成无人机飞行指令;
57、控制子模块,用于根据所述无人机飞行指令对无人机进行实时控制,利用无人机中的雷达传感器获取待维修地点的公路缺陷数据。
58、其有益效果在于,利用图像传感器获取待检测公路表面的图像数据,得到公路表面图像数据,对所述公路表面图像数据进行数据预处理,得到训练公路表面图像数据集;基于yolov7目标检测算法建立yolov7公路表面缺陷检测模型,在所述yolov7公路表面缺陷检测模型的输入端加入cbam注意机制模块,得到初始cbam-yolov7公路表面缺陷检测模型;利用ssa麻雀搜索算法对所述初始cbam-yolov7公路表面缺陷检测模型中的学习率进行优化,得到目标cbam-yolov7公路表面缺陷检测模型;将所述训练公路表面图像数据集输入至所述目标cbam-yolov7公路表面缺陷检测模型中进行公路表面缺陷检测,得到公路表面缺陷状态数据;根据所述公路表面缺陷状态数据判断所述待检测公路表面的缺陷状态,并获取所述待检测公路表面的待维修地点,利用雷达传感器获取待维修地点的公路缺陷数据;基于所述公路缺陷数据生成公路表面维修策略,将所述公路表面缺陷状态数据和所述公路表面维修策略传输至公路养护站中管理人员的移动终端。可以自动、快速地识别出公路表面的裂缝、坑槽、车辙等缺陷,从而减少了人工巡查的工作量,提高了检测效率。通过及时发现并测量公路表面的缺陷,对公路表面缺陷及时安排处理,可以有效预防因路面破损引发的交通事故,保障行车安全。同时可以实时监控公路状况,为相关部门提供准确的路况信息,有助于及时应对突发情况,减少交通拥堵和延误。
本文地址:https://www.jishuxx.com/zhuanli/20240822/281208.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表