一种轨道作业车的防碰撞方法、装置、设备、介质和系统与流程
- 国知局
- 2024-08-30 14:34:39
本发明创造属于轨道作业的,具体涉及了一种轨道作业车的防碰撞方法、装置、设备、介质和系统。
背景技术:
1、铁路大型机械化工务养路机械,包括清筛车、配砟车、捣固车等,通常这些作业车是成编组在天窗期工作。大机作业特点是扬尘大、光线暗、铁路线场景复杂,加上不确定天气,常带来安全隐患甚至出现重大的安全事故。安全事故包括作业时车与车相撞、清筛车悬臂碰断输电线杆、配砟车作业手碰断电线杆、车撞人等。大机司机为了防止出现事故发生需要不断瞭望和听车下指挥人员的指令,即使靠车上车下人工协调也不能完全消除安全事故的发生,同时降低了工作效率。
2、铁路维护目前的技术手段主要是采用激光雷达来检测电线杆位置、利用各车的安装的gps来测量车与车间距离防撞。激光雷达精度高,正常环境下效果好,操作人员根据激光测出的电线杆位置就知道如何避让;但是大机施工现场灰尘漫天扬,激光雷达的镜面被灰尘覆盖后功能差不能起到检测的作用。另外,大机作业在弯道、桥梁、隧道或山区铁路线上,gps信号不好,故靠gps数据计算车距不准,观察车距来避免车与车防撞在这些路段几乎无效。
技术实现思路
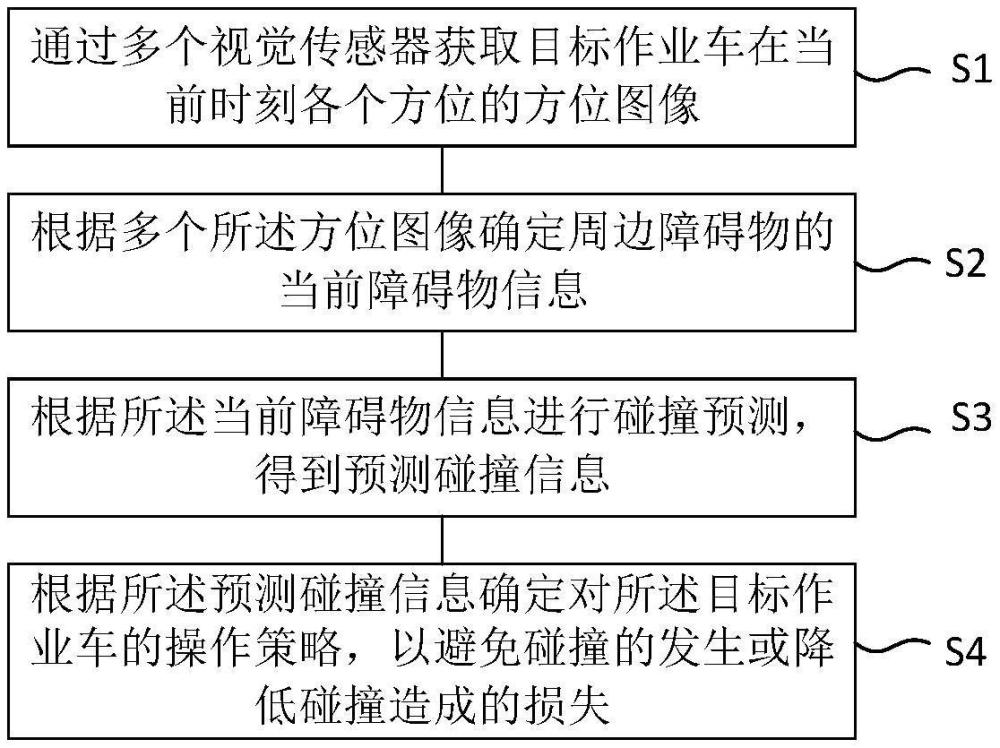
1、针对上述技术问题,本发明创造提出了一种轨道作业车的防碰撞方法、装置、设备、介质和系统。本技术通过通过多个视觉传感器获取目标作业车在当前时刻各个方位的方位图像;根据多个所述方位图像确定周边障碍物的当前障碍物信息;根据所述当前障碍物信息进行碰撞预测,得到预测碰撞信息;根据所述预测碰撞信息确定对所述目标作业车的操作策略,以避免碰撞的发生或降低碰撞造成的损失。实现了轨道作业车自动检测障碍物,并能够实现根据检测到的障碍物预测碰撞信息,进而及时的做出操作策略的调整,提升了轨道作业的安全性,减少了人力的投入,提升了工作效率。
2、为解决上述技术问题,本发明所采用的技术方案包含五个方面。
3、第一方面,提供了一种轨道作业车的防碰撞方法,包括:通过多个视觉传感器获取目标作业车在当前时刻各个方位的方位图像;根据多个所述方位图像确定周边障碍物的当前障碍物信息;根据所述当前障碍物信息进行碰撞预测,得到预测碰撞信息;根据所述预测碰撞信息确定对所述目标作业车的操作策略,以避免碰撞的发生或降低碰撞造成的损失。
4、在一些实施例中,所述根据多个所述方位图像确定周边障碍物的当前障碍物信息,包括:获取各个所述视觉传感器之间的视野重叠范围;根据所述视野重叠范围确定各个所述方位图像之间的重叠区域;从所述方位图像中确定方位障碍物,以及提取与所述方位障碍物对应的第一障碍物信息;根据所述重叠区域和所述第一障碍物信息将各个所述方位图像中的所述方位障碍物进行合并,生成周边障碍物;根据所述周边障碍物确定所述当前障碍物信息。
5、在一些实施例中,所述从所述方位图像中确定方位障碍物,以及提取与所述方位障碍物对应的第一障碍物信息,包括:在所述方位图像中识别疑似障碍物,并提取所述疑似障碍物的第二障碍物信息;根据所述第二障碍物信息确定所述疑似障碍物是否能够对所述目标作业车产生碰撞威胁;在确定所述疑似障碍物能对所述目标作业车产生碰撞威胁时,确定所述疑似障碍物为所述方位障碍物,并确定所述第二障碍物信息为所述第一障碍物信息。
6、在一些实施例中,所述第一障碍物信息包括:第一图形信息和第一位置信息;所述根据所述重叠区域和所述第一障碍物信息将各个所述方位图像中的所述方位障碍物进行合并,生成周边障碍物,包括:根据所述第一位置信息和所述第一图形信息确定各个所述方位障碍物的第一轮廓坐标集;根据各个所述第一轮廓坐标集确定同一方位图像中各个所述方位障碍物的关联关系;根据所述关联关系将同一方位图像中的各个所述方位障碍物融合成融合障碍物,并确定所述融合障碍物的第二轮廓坐标集;根据所述重叠区域确定重叠坐标范围;根据所述第二轮廓坐标集和所述重叠坐标范围确定所述融合障碍物在所述重叠区域的重叠部分,以及所述重叠部分的重叠坐标集;根据所述重叠坐标集将多个所述方位图像中的所述融合障碍物进行合并,形成周边障碍物。
7、在一些实施例中,所述关联关系包括:互为从属部件;所述根据各个所述第一轮廓坐标集确定同一方位图像中各个所述方位障碍物的关联关系,还包括:获取预设的距离阈值和数量阈值;根据各个所述第一轮廓坐标确定两两方位障碍物之间的距离数据集,其中所述距离数据集为两个方位障碍物之间各个坐标点的最小坐标距离的集合;根据所述距离数据集和所述距离阈值确定所述距离数据集中坐标距离小于或等于所述距离阈值的坐标点数量;在所述坐标点数量大于或等于所述数量阈值时,确定所述距离数据集所对应的两个所述方位障碍物互为从属部件。
8、在一些实施例中,所述根据所述关联关系将同一方位图像中的各个所述方位障碍物融合成融合障碍物,并确定所述融合障碍物的第二轮廓坐标集,包括:获取互为从属部件的两个方位障碍物之间的距离数据集;根据所述距离阈值确定所述距离数据集中小于或等于所述距离阈值的距离数值;根据所述距离数值分别在两个所述方位障碍物对应的第一轮廓坐标集中确定融合坐标;将两个所述第一轮廓坐标集中的所述融合坐标消除,并将两个所述第一轮廓坐标集合并形成第二轮廓坐标集。
9、在一些实施例中,所述根据所述周边障碍物确定所述当前障碍物信息,包括:根据所述第二轮廓坐标集和所述重叠坐标集确定所述周边障碍物的第三轮廓坐标集;根据所述第三轮廓坐标集确定所述周边障碍物的第二位置信息和第二图形信息;获取上一时刻所述周边障碍物的历史图形信息和所述历史位置信息;根据所述历史图形信息和所述第二图形信息确定周边障碍物的对应关系;根据所述对应关系、所述历史位置信息和所述第二位置信息确定所述周边障碍物的障碍物速度信息和障碍物运动姿态信息;根据所述障碍物速度信息、所述障碍物运动姿态信息、所述第二图形信息和所述第二位置信息确定所述当前障碍物信息。
10、在一些实施例中,所述预测碰撞信息包括:碰撞时间和碰撞点;所述根据所述当前障碍物信息进行碰撞预测,得到预测碰撞信息,包括:获取所述目标作业车的当前图形信息、当前位置信息、当前速度信息和当前运动姿态信息;根据所述当前位置信息、所述当前速度信息、所述障碍物速度信息和所述第二位置信息确定碰撞时间;根据所述当前图形信息、所述当前运动姿态信息、所述障碍物运动姿态信息和所述第二图形信息确定碰撞点。
11、在一些实施例中,所述周边障碍物包括:接触网立柱;所述根据所述预测碰撞信息确定对所述目标作业车的操作策略,包括:当所述周边障碍物为所述接触网立柱时,根据所述预测碰撞信息收缩所述目标作业车的作业机构。
12、在一些实施例中,所述周边障碍物还包括:其他作业车;所述根据所述预测碰撞信息确定对所述目标作业车的操作策略,还包括:当所述周边障碍物为其他作业车时,根据所述预测碰撞信息控制所述目标作业车的速度,并向所述周边障碍物发送碰撞警报。
13、第二方面,本技术提出了一种轨道作业车的防碰撞装置,包括:第一获取模块,用于通过多个视觉传感器获取目标作业车在当前时刻各个方位的方位图像;第一确定模块,用于根据多个所述方位图像确定周边障碍物的当前障碍物信息;第一预测模块,用于根据所述当前障碍物信息进行碰撞预测,得到预测碰撞信息;第二确定模块,用于根据所述预测碰撞信息确定对所述目标作业车的操作策略,以避免碰撞的发生或降低碰撞造成的损失。
14、第三方面,本技术提出了一种电子设备,包括:存储器和处理器,所述存储器上存储有计算机程序,该计算机程序被所述处理器执行时,执行如第一方面任一所述的一种轨道作业车的防碰撞方法。
15、第四方面,本技术提出了一种存储介质,该存储介质存储的计算机程序,能够被一个或多个处理器执行,所述计算机程序能够用来实现如第一方面中任一项所述的一种轨道作业车的防碰撞方法的步骤。
16、第五方面,本技术提出了一种轨道作业车的防碰撞系统,包括:多个视觉传感器和如第三方面所述电子设备;多个所述视觉传感器安装在所述目标作业车上,与所述电子设备电连接。
17、本发明创造的有益效果:本技术通过通过多个视觉传感器获取目标作业车在当前时刻各个方位的方位图像;根据多个所述方位图像确定周边障碍物的当前障碍物信息;根据所述当前障碍物信息进行碰撞预测,得到预测碰撞信息;根据所述预测碰撞信息确定对所述目标作业车的操作策略,以避免碰撞的发生或降低碰撞造成的损失。实现了轨道作业车自动检测障碍物,并能够实现根据检测到的障碍物预测碰撞信息,进而及时的做出操作策略的调整,提升了轨道作业的安全性,减少了人力的投入,提升了工作效率。
本文地址:https://www.jishuxx.com/zhuanli/20240830/282798.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。