一种两轮农业机器人底盘的制作方法
- 国知局
- 2024-08-30 14:56:16
本发明涉及农业机器人领域,特别指的是一种两轮农业机器人底盘。
背景技术:
1、现在市面上的农业机器人大多数都是为四轮驱动或者是两轮驱动的形式,且大多数为跨垄沟进行农业工作,在温室大棚内,行动不灵活,所以就有两轮机器人出现,但是两轮机器人需要自平衡,其整体结构复杂,且生产成本高。
2、申请号为cn2023104290534公布一种自动化植保机器人,采用横向两轮结构,需要进行跨垄进行操作,不大适应于运动范围受限的温室大棚内。
3、申请号为cn2018103050918公布一种具有多种运动模式的两轮机器人,采用飞轮来保证两轮机器人在运动时的自平衡,飞轮成本高昂,且使用要求高,整体机构复杂。
4、因此需要一种两轮农业机器人底盘来解决上述技术问题。
技术实现思路
1、本发明的目的在于提供一种两轮农业机器人底盘,具有结构紧凑,安装方便,控制简单的效果。
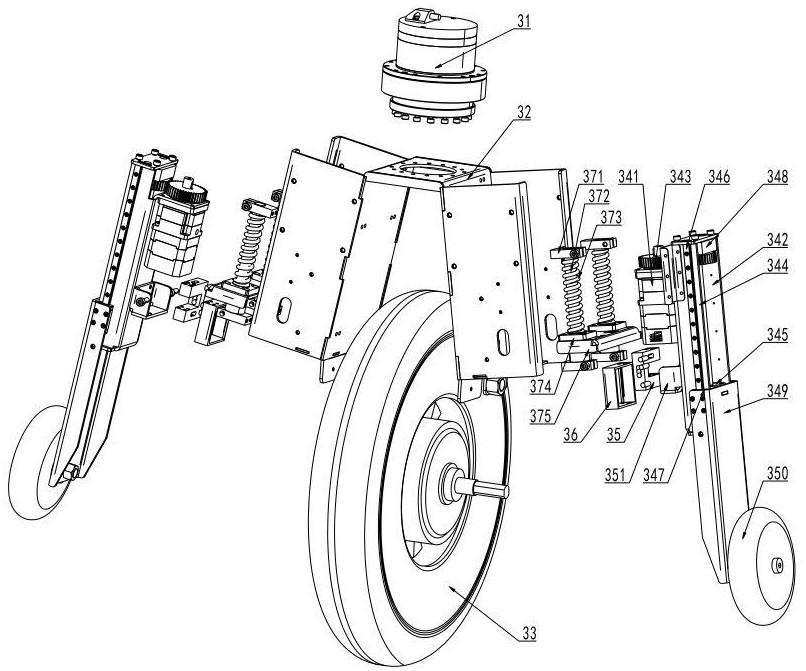
2、为了实现上述目的,本发明采用如下技术方案:一种两轮农业机器人底盘,底盘框架、驱动模组连接板、前转向驱动模组、后转向驱动模组;前转向驱动模组包括一体化关节、轮胎支架、轮毂电机、辅助轮组件、力传感器;驱动模组连接板分别固定在底盘框架前后两端;前转向驱动模组通过一体化关节与驱动模组连接板相连接;一体化关节固定在轮胎支架上;轮毂电机安装在轮胎支架上;辅助轮组件包括电机、辅助轮连接板、齿轮、丝杆、丝杆螺母、导轨、导轨滑块、轴承座、辅助板、辅助轮、力传感器连接板甲;辅助轮组件共有两组,对称安装在轮胎支架上;电机安装在辅助轮连接板上;齿轮分别安装在电机轴与丝杆上;轴承座固定在辅助轮连接板上;导轨固定在辅助轮连接板上;导轨滑块安装在导轨上;丝杆与丝杆螺母通过轴承座安装在辅助轮连接板上;辅助板通过丝杆螺母和导轨滑块与辅助轮连接板连接;辅助轮安装在辅助板上;力传感器连接板甲与辅助轮连接板连接;力传感器连接板甲与力传感器连接;力传感器与轮胎支架连接;后转向驱动模组所需零件与前转向驱动模组相同。
3、优选的,丝杆与丝杆螺母是滚珠丝杆与滚珠丝杆螺母;电机为电机;力传感器为一维力传感器或者二维力传感器或者是三维力传感器。
4、优选的,还包括橡胶块,橡胶块装在力传感器与轮胎支架之间,起到减震作用。
5、优选的,还包括有减震组件,减震组件包括导向杆固定座、导向杆、弹簧、加长直线轴承、力传感器连接板乙;减震组件有四组,分别对称左右安装在驱动模组主体上;导向杆固定座固定在轮胎支架上;导向杆固定在导向杆固定座上;弹簧套在导向杆上;加长直线轴承套在导向杆上。
技术特征:1.一种两轮农业机器人底盘,其特征是,包括底盘框架、驱动模组连接板、前转向驱动模组、后转向驱动模组;所述前转向驱动模组包括一体化关节、轮胎支架、轮毂电机、辅助轮组件、力传感器;所述驱动模组连接板分别固定在底盘框架前后两端;所述前转向驱动模组通过一体化关节与驱动模组连接板相连接;所述一体化关节固定在轮胎支架上;所述轮毂电机安装在轮胎支架上;所述辅助轮组件包括电机、辅助轮连接板、齿轮、丝杆、丝杆螺母、导轨、导轨滑块、轴承座、辅助板、辅助轮、力传感器连接板甲;所述辅助轮组件共有两组,中心对称安装在轮胎支架上;所述电机安装在辅助轮连接板上;所述齿轮分别安装在电机轴与丝杆上;所述轴承座固定在辅助轮连接板上;所述导轨固定在辅助轮连接板上;所述导轨滑块安装在导轨上;所述丝杆与丝杆螺母通过轴承座安装在辅助轮连接板上;所述辅助板通过丝杆螺母和导轨滑块与辅助轮连接板连接;所述辅助轮安装在辅助板上;所述力传感器连接板甲与辅助轮连接板连接;所述力传感器连接板甲与力传感器连接;所述力传感器与轮胎支架连接;所述后转向驱动模组所需零件与前转向驱动模组相同。
2.根据权利要求1所述的一种两轮农业机器人底盘,其特征是,所述丝杆与丝杆螺母是滚珠丝杆与滚珠丝杆螺母;所述电机为直流无刷电机;所述力传感器为一维力传感器或者二维力传感器或者是三维力传感器。
3.根据权利要求1与权利要求2所述的一种两轮农业机器人底盘,其特征是,还包括橡胶块;所述橡胶块安装在力传感器与轮胎支架之间,起到减震作用。
4.根据权利要求1与权利要求2所述的一种两轮农业机器人底盘,其特征是,还包括有减震组件;所述减震组件包括导向杆固定座、导向杆、弹簧、加长直线轴承、传感器连接板乙;所述减震组件有四组,分别对称左右安装在驱动模组主体上;所述导向杆固定座固定在轮胎支架上;所述导向杆固定在导向杆固定座上;所述弹簧套在导向杆上;所述加长直线轴承套在导向杆上;所述减震组件通过传感器连接板乙连接组成一组。
技术总结本发明指的是一种两轮农业机器人底盘,适用于运动范围受限的温室大棚内,具有结构紧凑,安装方便,控制简单的优点。该底盘包括底盘框架、驱动模组连接板、前转向驱动模组、后转向驱动模组。前转向驱动模组包括一体化关节、轮胎支架、轮毂电机、辅助轮组件和力传感器。其中辅助轮组件包括电机、齿轮、丝杆等部件,安装在轮胎支架上。这种底盘设计还特别使用了滚珠丝杆及滚珠丝杆螺母、直流无刷电机和多维力传感器,以提供高效动力和精确力量测量。除了在力传感器与轮胎支架之间安装了减震橡胶块,底盘还配备了减震组件,包括导向杆、弹簧和加长直线轴承等,这些部件通过传感器连接板连接,有效提升了机器人运动过程的稳定性。技术研发人员:胡妙丹,郑超受保护的技术使用者:绍兴市农业科学研究院技术研发日:技术公布日:2024/8/27本文地址:https://www.jishuxx.com/zhuanli/20240830/284667.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表