手术机器人在线手眼标定方法、装置、设备及介质与流程
- 国知局
- 2024-09-05 14:29:37
本公开涉及计算机及医疗器械,尤其涉及一种手术机器人在线手眼标定方法、装置、设备及介质。
背景技术:
1、随着技术进步,手术机器人逐渐应用到微创手术中。手术机器人通过清晰的成像系统和灵活的机械臂,以微创的手术形式,协助医生实施复杂的外科手术,完成术中定位、切断、穿刺、止血、缝合等操作。
2、医生通过腔镜摄像头提供的画面观察病人腔内组织和镜头视野下的手术器械位置,同时通过主手操作台的主手控制远端的机械臂末端器械运动,完成手术动作。完成上述操作,要求腔镜与手术器械的相对姿态要与医生自身的眼睛与双手相对姿态相似,否则会导致器械运动方向与医生期望方向出现偏差或者器械运动速度与医生设定速度不一致,这将显著增加手术风险。
3、针对手术机器人的器械与相机相对位姿的标定方法称为“手-眼标定”,传统的标定方法一般是在器械末端安装标定板,然后按既定流程完成标定,标定完成后再拆除标定板。以上标定方法需要在机器人出厂时完成标定,然后将标定结果保存使用。但是随着机器人使用时间的累积,机械结构会出现磨损,且对于线缆驱动的手术器械,线缆也会发生形变,若继续使用出厂标定的参数,将导致“手-眼”的映射出现误差。要解决以上问题,当前需要厂家技术人员定期到医院(或者机器寄回厂家)检查“手-眼”映射的误差是否在可接受范围,若超出则需要人为重新标定,考虑到设备可能在全国或者全球范围内使用,这将极大增加维护成本。
技术实现思路
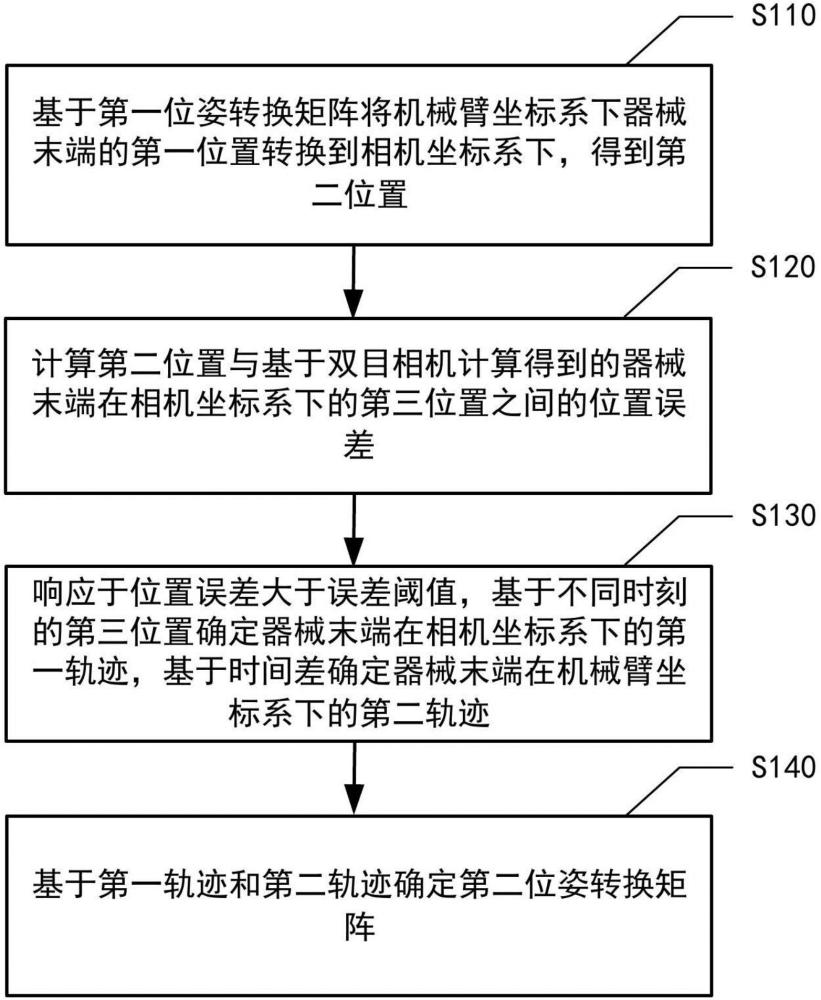
1、有鉴于此,本公开实施例的第一方面提供了一种手术机器人在线手眼标定方法,包括:基于第一位姿转换矩阵将机械臂坐标系下器械末端的第一位置转换到相机坐标系下,得到第二位置;计算第二位置与基于双目相机计算得到的器械末端在相机坐标系下的第三位置之间的位置误差;响应于位置误差大于误差阈值,基于不同时刻的第三位置确定器械末端在相机坐标系下的第一轨迹,基于时间差确定器械末端在机械臂坐标系下的第二轨迹;其中,时间差为基于双目相机和基于机械臂电机系统获取器械同一姿态数据的时间差;基于第一轨迹和第二轨迹确定第二位姿转换矩阵。
2、根据本公开的实施例,方法还包括:将器械末端移动到双目相机的镜头视野下;通过机械臂电机系统控制器械末端移动指定距离;监控机械臂电机系统中电机的位置,基于双目相机采集图像监控器械末端;响应于电机的位置不再变化,记录机械臂电机系统的第一时间;响应于器械末端在图像中的位置不再变化,记录采集位置不再变化的图像的第二时间;计算第一时间与得到第二时间之间的差值,得到时间差。
3、根据本公开的实施例,基于不同时刻的第三位置确定器械末端在相机坐标系下的第一轨迹数据,包括:计算不同时刻的第三位置对应的器械末端的运动速度;剔除运动速度大于预设阈值对应的第三位置,基于剩余的第三位置确定第一轨迹。
4、根据本公开的实施例,基于时间差确定器械末端在机械臂坐标系下的第二轨迹,包括:基于时间差与第三位置对应的不同时刻计算机械臂坐标系下第一位置对应的多个时刻,获取多个时刻对应的第一位置;剔除多个第一位置中与剔除的第三位置对应的时刻的第一位置,基于剩余的第一位置确定第一轨迹。
5、根据本公开的实施例,基于不同时刻的第三位置确定器械末端在相机坐标系下的第一轨迹数据,还包括:计算任意相邻时刻对应的第三位置之间的距离;响应于距离小于预设距离,剔除相邻时刻对应的第三位置中的任意一个第三位置,基于剩余的第三位置确定第一轨迹;基于时间差确定器械末端在机械臂坐标系下的第二轨迹,还包括:剔除多个第一位置中与剔除的第三位置对应的时刻的第一位置,基于剩余的第一位置确定第一轨迹。
6、根据本公开的实施例,方法还包括:重复计算第二位置与基于双目相机计算得到的器械末端在相机坐标系下的第三位置之间的位置误差,得到多个位置误差;对多个位置误差求平均值,作为最终的位置误差。
7、根据本公开的实施例,方法还包括:响应于位置误差不大于误差阈值,对第一位姿转换矩阵不进行更新。
8、本公开实施例的第二方面提供了一种手术机器人在线手眼标定装置,包括:转换模块,被配置为基于第一位姿转换矩阵将机械臂坐标系下器械末端的第一位置转换到相机坐标系下,得到第二位置;计算模块,被配置为计算第二位置与基于双目相机计算得到的器械末端在相机坐标系下的第三位置之间的位置误差;确定模块,被配置为响应于位置误差大于误差阈值,基于不同时刻的第三位置确定器械末端在相机坐标系下的第一轨迹,基于时间差确定器械末端在机械臂坐标系下的第二轨迹;其中,时间差为基于双目相机和基于机械臂电机系统获取器械同一姿态数据的时间差;标定模块,被配置为基于第一轨迹和第二轨迹确定第二位姿转换矩阵。
9、本公开实施例的第三方面提供了一种电子设备,包括:一个或多个处理器;存储器,用于存储一个或多个程序,其中,当一个或多个程序被一个或多个处理器执行时,使得一个或多个处理器实现手术机器人在线手眼标定方法。
10、本公开实施例的第四方面提供了一种计算机可读存储介质,其上存储有可执行指令,该指令被处理器执行时使处理器实现手术机器人在线手眼标定方法。
技术特征:1.一种手术机器人在线手眼标定方法,其特征在于,包括:
2.根据权利要求1所述的手术机器人在线手眼标定方法,其特征在于,所述方法还包括:
3.根据权利要求1所述的手术机器人在线手眼标定方法,其特征在于,所述基于不同时刻的第三位置确定器械末端在所述相机坐标系下的第一轨迹数据,包括:
4.根据权利要求3所述的手术机器人在线手眼标定方法,其特征在于,基于时间差确定器械末端在机械臂坐标系下的第二轨迹,包括:
5.根据权利要求4所述的手术机器人在线手眼标定方法,其特征在于,所述基于不同时刻的第三位置确定器械末端在所述相机坐标系下的第一轨迹数据,还包括:
6.根据权利要求1所述的手术机器人在线手眼标定方法,其特征在于,所述方法还包括:
7.根据权利要求1所述的手术机器人在线手眼标定方法,其特征在于,所述方法还包括:
8.一种手术机器人在线手眼标定装置,其特征在于,包括:
9.一种电子设备,包括:
10.一种计算机可读存储介质,其上存储有可执行指令,该指令被处理器执行时使处理器实现权利要求1至7中任一项所述的方法。
技术总结本公开的实施例提供了一种手术机器人在线手眼标定方法、装置、设备及介质,方法包括:基于第一位姿转换矩阵将机械臂坐标系下器械末端的第一位置转换到相机坐标系下,得到第二位置;计算第二位置与基于双目相机计算得到的器械末端在相机坐标系下的第三位置之间的位置误差;响应于位置误差大于误差阈值,基于不同时刻的第三位置确定器械末端在相机坐标系下的第一轨迹,基于时间差确定器械末端在机械臂坐标系下的第二轨迹;其中,时间差为基于双目相机和基于机械臂电机系统获取器械同一姿态数据的时间差;基于第一轨迹和第二轨迹确定第二位姿转换矩阵。技术研发人员:邓永贡,黄军辉,高连胜,乌彩妮,高德中受保护的技术使用者:杭州华匠医学机器人有限公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/286744.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表