基于磁传感器的海缆入犁口三维姿态确定方法及系统与流程
- 国知局
- 2024-09-05 14:36:00
本发明涉及海缆敷设,尤其涉及一种基于磁传感器的海缆入犁口三维姿态确定方法及系统。
背景技术:
1、海底电力电缆施工是一项复杂的大型工程,工程建设受地域条件、海洋环境、施工设备等多种因素限制。海底电力电缆施工技术复杂,技术难度远远高于陆地电缆,海缆出缆过驳、入水释放、海底埋设等环节都需要精准控制,并且需要各个环节的协同配合,否则将影响海缆施工质量,严重时可能会造成海缆打扭等损伤,导致海缆施工无法进行。
2、获取海缆入犁口姿态是海缆敷设作业中非常关键的环节,直接影响到海缆施工质量,目前多采用监控摄像头对入犁口处电缆进行监视,获取海缆入犁口的姿态。监控摄像头在水况不佳水域浑浊的海底难以捕捉到高清图像,无法获取准确的入犁口姿态。
技术实现思路
1、本发明提供基于磁传感器的海缆入犁口三维姿态确定方法及系统,解决的技术问题在于:如何在水况不佳水域浑浊的海底获取准确的入犁口姿态。
2、为解决以上技术问题,本发明提供基于磁传感器的海缆入犁口三维姿态确定方法,包括步骤:
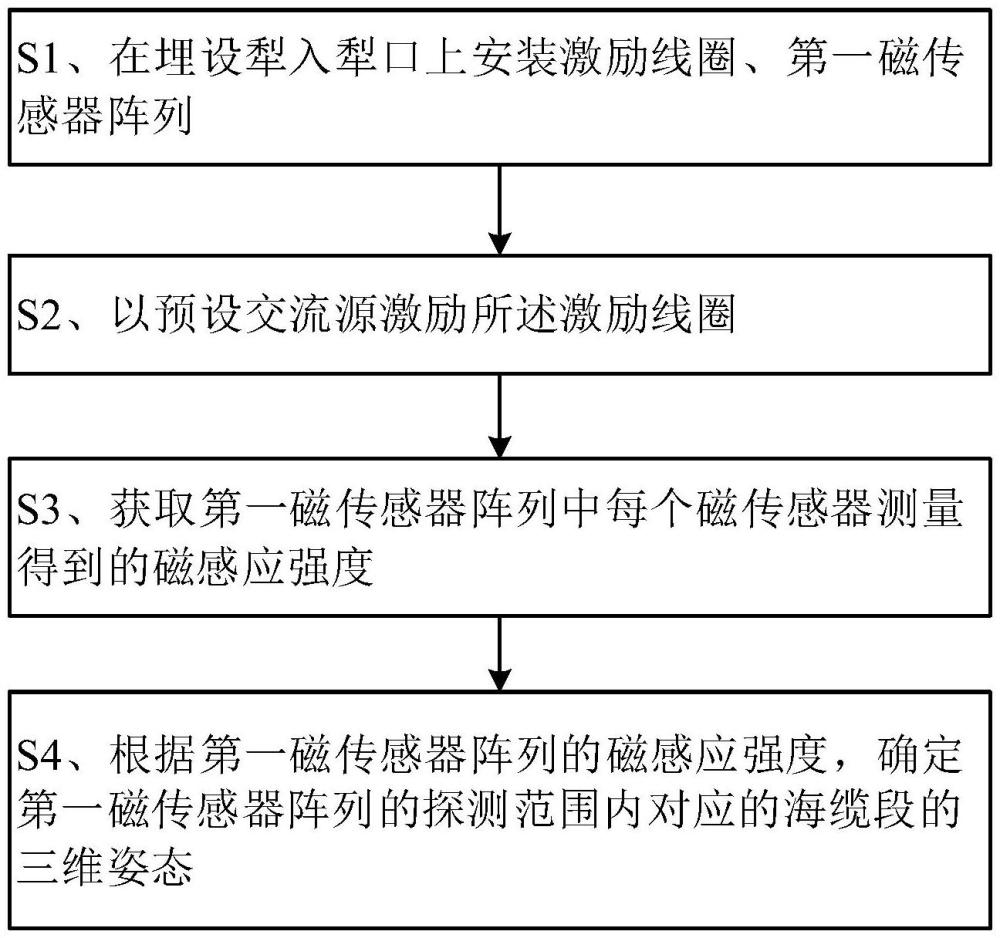
3、s1、在埋设犁入犁口上安装激励线圈、第一磁传感器阵列,所述激励线圈和所述第一磁传感器阵列竖直位于入犁口处海缆的前侧和后侧;
4、s2、以预设交流源激励所述激励线圈;
5、s3、获取所述第一磁传感器阵列中每个磁传感器测量得到的磁感应强度;
6、s4、根据所述第一磁传感器阵列的磁感应强度,确定所述第一磁传感器阵列的探测范围内对应的海缆段的三维姿态。
7、进一步地,在所述步骤s1中,所述第一磁传感器阵列包括m行n列独立排布的磁传感器;记海缆的直径为d,每一列相邻两个磁传感器之间的距离为dl,每一行相邻两个磁传感器之间的距离为dh,则dl、dh的设置满足:
8、dh=ad,dl=bd,1≤a≤1.5,0.1≤b≤0.2。
9、进一步地,所述步骤s4具体包括步骤:
10、s4a1、按照所述第一磁传感器阵列的排列方式,将所述第一磁传感器阵列的磁感应强度生成一个m行n列的磁感特征矩阵;
11、s4a2、将所述磁感特征矩阵输入基于神经网络的三维姿态特征生成网络,所述三维姿态特征生成网络运作后输出一个姿态特征矩阵;
12、s4a3、根据所述姿态特征矩阵生成三维姿态图片。
13、进一步地,所述步骤s4a2中,生成所述三维姿态特征生成网络的步骤包括:
14、①在清亮海底,采用与步骤s1、s2、s3相同步骤得到多个采样时刻所述第一磁传感器阵列的磁感应强度,并采用与步骤s4a1相同步骤生成多个采样时刻的磁场特征矩阵,同时采用三维成像摄像头获取所述多个采样时刻的对应海缆段的三维姿态拍摄图片,采用雷达探测技术获取所述多个采样时刻的对应海缆段的三维姿态雷达成像图片;
15、②提取所述三维姿态拍摄图片和所述三维姿态雷达成像图片的姿态特征,得到姿态特征矩阵;
16、③将相同时刻的磁场特征矩阵和姿态特征矩阵作为一组特征数据,生成多对特征数据构建数据集;
17、④构建神经网络模型,采用所述数据集对所述神经网络模型进行训练、测试,将参数最优的神经网络模型保存为所述三维姿态特征生成网络。
18、进一步地,所述步骤s1还包括:在海缆入犁口上安装第二磁传感器阵列,所述激励线圈、所述第一磁传感器阵列和所述第二磁传感器阵列以任意组合分别位于入犁口处海缆的上方、前侧、后侧;所述第一磁传感器阵列和所述第二线圈感应阵列参数相同、安装位置对称;
19、所述步骤s3还包括:获取所述第二磁传感器阵列中每个磁传感器测量得到的磁感应强度;
20、所述步骤s4具体为:根据所述第一磁传感器阵列和所述第二磁传感器阵列的磁感应强度,确定所述第一磁传感器阵列和所述第二磁传感器阵列对应的海缆段的三维姿态。
21、进一步地,所述步骤s4具体包括步骤:
22、s4b1、按照所述第一磁传感器阵列的排列方式,将所述第一磁传感器阵列的磁感应强度生成一个m行n列的第一磁感特征矩阵;按照所述第二磁传感器阵列的排列方式,将所述第二磁传感器阵列的磁感应强度生成一个m行n列的第二磁感特征矩阵;将所述第一磁感特征矩阵和所述第二磁感特征矩阵进行融合,得到一个m行n列的第三磁感特征矩阵;
23、s4b2、将所述第一磁感特征矩阵输入基于神经网络的第一三维姿态特征生成网络,所述第一三维姿态特征生成网络运作后输出第一姿态特征矩阵;将所述第二磁感特征矩阵输入基于神经网络的第二三维姿态特征生成网络,所述第二三维姿态特征生成网络运作后输出第二姿态特征矩阵;将所述第三磁感特征矩阵输入基于神经网络的第三三维姿态特征生成网络,所述第三三维姿态特征生成网络运作后输出第一姿态特征矩阵;
24、s4b3、根据所述第一姿态特征矩阵生成第一三维姿态图片;根据所述第二姿态特征矩阵生成第二三维姿态图片;根据所述第三姿态特征矩阵生成第三三维姿态图片;
25、s4b4、根据所述第一三维姿态图片、所述第二三维姿态图片、所述第三三维姿态图片生成最终的三维姿态图片。
26、进一步地,所述步骤s4b4具体包括步骤:
27、①将所述第一三维姿态图片、所述第二三维姿态图片、所述第三三维姿态图片分别记为p1、p2和p3,计算p1、p2之间的相似度z12,p1和p3之间的相似度z13,p2和p3之间的相似度z23;
28、②判断z12、z13、z23是否均在98%以上,若是则将p1、p2和p3进行融合生成最终的三维姿态图片,若否则进入下一步;
29、③判断z12、z13、z23中是否有两个在98%以上,若是则将不在98%以上的图片相似度所对应的两张图片中,与另外一张图片相似度最小的图片剔除,将剔除后剩余的两张图片进行融合生成最终的三维姿态图片,若否则进入下一步;
30、④判断z12、z13、z23中是否仅有1个在98%以上,若是则将在98%以上的相似度所对应的两张图片融合生成最终的三维姿态图片,若否则进入下一步;
31、⑤将所述第三三维姿态图片作为最终的三维姿态图片。
32、进一步地,在所述步骤s4b2中,生成所述第一三维姿态特征生成网络、所述第二三维姿态特征生成网络、所述第三三维姿态特征生成网络的过程与权利要求4中生成所述三维姿态特征生成网络的步骤相同。
33、本发明还提供一种基于磁传感器的海缆入犁口三维姿态确定系统,其关键在于,包括激励模块、第一磁传感器阵列和姿态确定模块;所述激励模块包括相连接的激励线圈和激励电路;
34、所述激励线圈和所述第一磁传感器阵列竖直位于入犁口处海缆的前侧和后侧;
35、所述激励电路用于生成预设交流源作用于所述激励线圈;
36、所述姿态确定模块用于执行上述方法中所述的步骤s3、s4。
37、优选的,该系统还包括第二磁传感器阵列,所述激励线圈、所述第一磁传感器阵列和所述第二磁传感器阵列以任意组合分别位于入犁口处海缆的上方、前侧、后侧;所述第一磁传感器阵列和所述第二线圈感应阵列参数相同、安装位置对称;所述姿态确定模块还用于执行上述方法中所述的步骤s3、s4。
38、本发明提供的基于磁传感器的海缆入犁口三维姿态确定方法及系统,通过在入犁口处海缆的二面(前侧、后侧)设置激励线圈、第一磁传感器阵列,或者在入犁口处海缆的三面(上方、前侧、后侧)设置激励线圈、第一磁传感器阵列和第二磁传感器阵列,激励线圈在预设交流源的激励下产生交变磁场,海缆中的金属介质感知到交变磁场后产生电涡流,而涡流又会产生一个反向磁场,进一步通过检测第一磁传感器阵列(及第二磁传感器阵列)的磁感应强度,进一步根据磁感应强度的大小和分布确定对应的海缆段的三维姿态,可应用于任何水况的海底,适用性广。
本文地址:https://www.jishuxx.com/zhuanli/20240905/287222.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。