一种可调姿月球软着陆器及其工作方法
- 国知局
- 2024-09-05 14:39:30
本发明涉及月球软着陆器,具体为一种可调姿月球软着陆器及其工作方法。
背景技术:
1、月球软着陆器是指在月球探测任务中,用于将航天器(如月球车、探测器等)安全、无损地降落到月球表面的装置,但是月球软着陆器在月球表面着陆后,容易因为受某些外界因素影响而发生位移,如月震或者月球软着陆器稳定结构不充分等,同时着陆器的支腿难以根据着陆点的实际情况进行自适应调节,在坑洼不平的月球表面稳定性较差,因此降低了月球软着陆器着陆后的稳定性。
2、而我们结合上述的问题就会发现,目前现有的月球软着陆器,在进行使用的时候,很难同时去规避上述提出的问题,并且即便是能够解决,也需要通过外部工具配合进行解决,从而无法达到我们所期望的效果,故而,我们提出一种可调姿月球软着陆器及其工作方法。
技术实现思路
1、本发明的目的在于提供一种可调姿月球软着陆器及其工作方法,以解决上述背景技术中提出的问题。
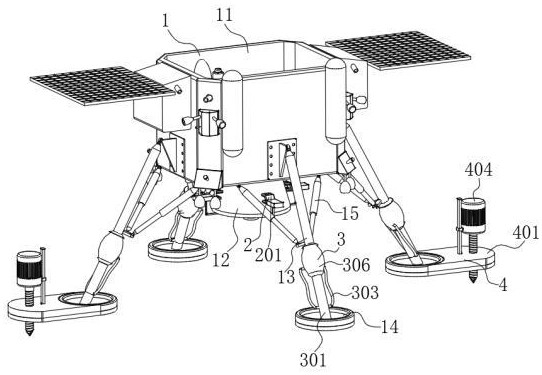
2、为实现上述目的,本发明提供如下技术方案:一种可调姿月球软着陆器,包括主体机构,所述主体机构包括软着陆器本体,所述软着陆器本体的底部固定连接有导向筒,所述软着陆器本体的侧面转动连接有第一电推杆,所述第一电推杆的数量为四个,所述第一电推杆的伸缩端设置有支撑脚,所述第一电推杆的表面转动连接有两个第二电推杆,所述第二电推杆的数量为八个,两个所述第二电推杆的一端均与软着陆器本体的底部转动连接,所述第一电推杆和第二电推杆均通过软着陆器本体的供电系统进行供电,所述导向筒的表面设置有微调姿机构,所述微调姿机构用于对软着陆器本体的倾斜方向进行监测且对倾斜方进行平衡矫正;
3、所述第一电推杆的表面设置有缓冲机构,所述缓冲机构与微调姿机构配合使用,所述缓冲机构用于缓解软着陆器本体着陆时的冲击力;
4、所述支撑脚的一侧设置有锚紧机构,所述锚紧机构与微调姿机构和缓冲机构配合使用,所述锚紧机构用于将支撑脚与月壤之间紧固贴合。
5、优选的,所述微调姿机构包括四个连接架,四个所述连接架均匀分布于导向筒的表面并与导向筒固定连接,四个所述连接架的分布方向分别与四个第一电推杆对应,所述连接架的一侧固定连接有监测盒,所述监测盒的内壁固定连接有两个导向轨,两个所述导向轨为相对设置,两个所述导向轨的内壁共同滚动连接有滚动杆,所述滚动杆的表面固定连接有挤压块,所述监测盒内腔的一端固定连接有第一轻触开关,所述第一轻触开关与第一电推杆电性连接,所述挤压块与第一轻触开关配合使用。
6、优选的,每个所述监测盒的底部均开设有卡紧孔,所述卡紧孔的内腔紧密接触有限位杆,四个所述限位杆的一端共同固定连接有脱离筒,所述脱离筒位于导向筒的正下方,所述限位杆的表面与挤压块的表面接触。
7、优选的,所述缓冲机构包括滑动连接于第一电推杆伸缩端表面的集压筒,所述集压筒的一端与支撑脚的表面固定连接,所述第一电推杆的伸缩端固定连接有活塞,所述活塞滑动连接于集压筒的内腔,所述集压筒的表面固定连通有两个导气管,所述第一电推杆驱动端的表面固定连接有第一缓冲垫,所述集压筒的一端固定连接有第二缓冲垫,所述第一电推杆的伸缩端滑动连接于第一缓冲垫与第二缓冲垫的内壁,所述第一缓冲垫的一端固定连接有缓冲气囊,所述缓冲气囊滑动套设于第一电推杆伸缩端的表面,两个所述导气管的一端均与缓冲气囊的内腔固定连通,所述第一缓冲垫与第二缓冲垫的相对侧固定连接有第一弹簧,所述第一弹簧套设于第一电推杆伸缩端的表面。
8、优选的,所述锚紧机构包括固定连接于支撑脚表面的定位块,所述定位块的数量为两个,所述定位块的内壁螺纹连接有螺纹锚杆,所述螺纹锚杆的顶部固定连接有连接筒,所述连接筒的顶部设置有电机,所述电机的输出端与连接筒的顶部固定连接,所述定位块的顶部固定连接有导向杆,所述电机的表面固定连接有限位套块,所述限位套块滑动连接于导向杆的表面,所述定位块的顶部固定连接有第二轻触开关,所述第二轻触开关与电机电性连接,所述限位套块与第二轻触开关配合使用。
9、优选的,所述螺纹锚杆的内壁开设有空腔,所述空腔的内壁固定连接有第三电推杆,所述第三电推杆与第二轻触开关电性连接,所述空腔的内壁滑动连接有挤压柱,所述挤压柱的底部固定连接有下压杆,所述空腔的内壁滑动连接有四个推动块,四个所述推动块拼凑形成完整的锥形,所述下压杆的表面与四个推动块的相对侧接触,所述推动块的一侧固定连接有嵌入杆,所述螺纹锚杆的表面开设有四个滑动孔,所述滑动孔与空腔连通,所述嵌入杆滑动连接于滑动孔的内腔,所述第三电推杆的伸缩端与挤压柱的顶部配合使用。
10、优选的,所述空腔的内壁开设有两个滑动槽,所述挤压柱的表面固定连接有两个滑动块,两个所述滑动块分别滑动连接于两个滑动槽的内腔。
11、优选的,所述空腔的内壁固定连接有支撑环,所述支撑环套设于挤压柱的表面,所述支撑环的顶部固定连接有第二弹簧,所述第二弹簧的一端与两个滑动块的底部固定连接。
12、优选的,所述空腔内腔的底部开设有四个导向槽,所述导向槽的内壁固定连接有导向柱,所述嵌入杆的底部固定连接有限位板,所述限位板的内壁滑动连接于导向柱的表面,所述导向柱的表面套设有第三弹簧,所述第三弹簧的一端与限位板的一侧固定连接,所述第三弹簧的另一端与导向槽的内侧固定连接。
13、优选的,一种可调姿月球软着陆器的工作方法,具体步骤如下:
14、s1:当软着陆器本体登陆月球后,四个支撑脚与月球接触,当其中一个支撑脚或者几个支撑脚处于凹坑处,导致软着陆器本体放置时,失去平衡状态,向凹坑处倾斜,此时微调姿机构对倾斜方进行监测,启动处于倾斜方的第一电推杆,使其延伸,使软着陆器本体逐渐趋于平衡状态,实现对软着陆器本体的微调姿;
15、s2:当软着陆器本体登陆月球时,支撑脚与地面接触时,会对支撑脚产生反向冲击力,在支撑脚与地面接触时,通过反推力实现集压筒在第一电推杆伸缩端表面的滑动,在二者相对滑动时将无气的缓冲气囊充满气,对集压筒与第一电推杆的驱动端进行填充,实现集压筒滑动时的软缓冲,以完成对软着陆器本体登陆月球时的缓冲;
16、s3:当软着陆器本体登陆月球后,可能因某些外界因素产生一定的位移,锚紧机构通过电机输出端的转动带动螺纹锚杆在定位块的内壁螺纹转动,直至螺纹锚杆下移至月球层的一定深度,随后通过第三电推杆的延伸,推动挤压柱和下压杆,实现对四个嵌位杆的推动,使四个嵌位杆朝四个方向嵌入月球层,实现对锚紧螺杆的竖向限位,从而实现对其中两个相对的支撑脚的定位,确保了软着陆器本体登陆月球后的稳定性。
17、与现有技术相比,本发明的有益效果是:
18、本发明通过设置微调姿机构,能够实现软着陆器本体着陆月球后,对处于凹坑处的支撑脚与软着陆器本体之间的距离进行延伸,实现对软着陆器本体失衡一侧的支撑,实现了根据着陆点的实际情况进行自适应调节,提升了软着陆器本体着陆后的稳定性。
19、本发明通过设置缓冲结构,能够将软着陆器本体着陆时的下压力,通过集压筒、活塞和第一电推杆的伸缩端转换成缓冲气囊内部的空气,使充满气体的缓冲气囊对下压力产生一定的阻碍,从而增加了软着陆器本体登陆时的缓冲性,提升了软着陆器本体着陆月球时的稳定性。
20、本发明通过设置锚紧机构,能够通过螺纹锚杆嵌入月球更深层,加强支撑脚的抓地性,有效增加了软着陆器本体对于某些外界因素产生位移的抵抗力,从而提升了软着陆器本体着陆月球后的稳定性。
本文地址:https://www.jishuxx.com/zhuanli/20240905/287519.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表