一种高炉摆动溜嘴的控制方法及系统与流程
- 国知局
- 2024-09-05 14:49:42
本发明属于高炉溜嘴,更具体地,本发明涉及一种高炉摆动溜嘴的控制方法及系统。
背景技术:
1、高炉每天都源源不断出铁水,出铁过程中铁水装满摆动溜嘴一侧的受铁罐(满管)后,需要去装另一侧的受铁罐(空罐),即需要在满罐与空罐之间切换,切换过程是通过摆动流嘴的摆动来实现。现阶段的摆动流嘴的控制存在如下问题:
2、在高炉出铁刚刚开始阶段,摆动流嘴所处的位置与计划方向不一致,最终导致铁水落地的严重事故,比如说:在本侧铁口未出铁期间,检修工人经常需要把摆动流嘴摆动到0度来检查摆动流嘴是否需要检修,或者进行临时的修补,在检修完毕之后,摆动流嘴的角度比较随意,在出铁时,摆动流嘴所处的方向可能是0度,或者处于计划出铁的对侧,这样铁水经过摆动流嘴可能出现两侧同时受铁,或者错误的一侧进行受铁,甚至会导致铁水落地。
3、由于铁水是高温液体,一旦发生落地,会引发严重的安全事故,所以需要尽可能的保证溜嘴不轻易出现错摆、误摆的情况。
技术实现思路
1、本发明提供一种高炉摆动溜嘴的控制方法,旨在改善上述问题。
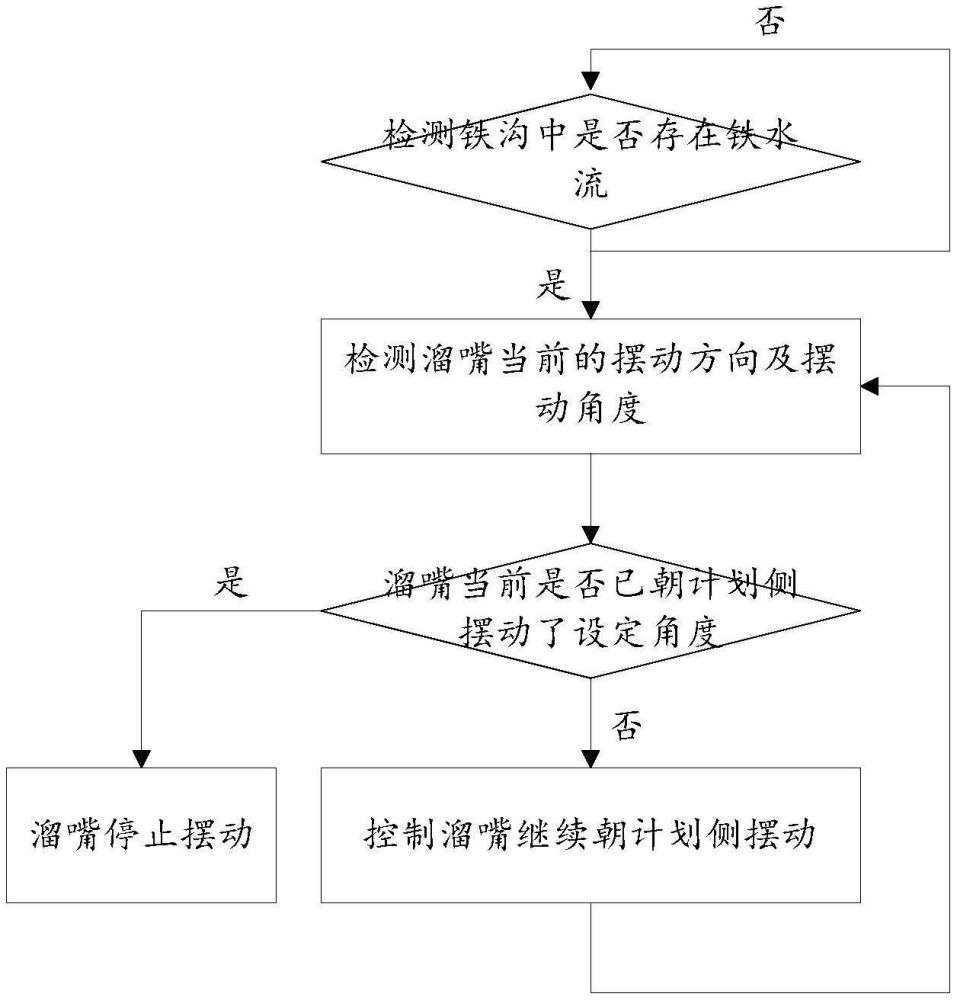
2、本发明是这样实现的,一种高炉摆动溜嘴的控制方法,所述方法包括:
3、(1)检测铁沟中是否存在铁水流,若检测结果为是,则执行步骤(2);
4、(2)检测溜嘴当前的摆动方向及摆动角度;
5、(3)检测溜嘴当前是否已朝计划侧摆动了设定角度,若检测结果为否,控制溜嘴继续朝计划侧摆动,执行步骤(2)。
6、进一步的,该方法包括:在检测到溜嘴朝计划测的摆动角度达到角度阈值后,执行如下步骤:
7、检测溜嘴计划侧、非计划侧是否存在铁水流,若溜嘴计划侧存在铁水流、非计划侧不存在铁水流,则认定溜嘴角度已摆动至计划侧的设定角度。
8、进一步的,在溜嘴摆动至计划侧的设定角度后,控制溜嘴向计划侧的受铁罐注入铁水,在检测到计划侧的受铁罐重量达到重量阈值后,将溜嘴的另一侧作为计划侧,控制溜嘴进行摆动,摆动至计划侧的设定角度。
9、进一步的,在溜嘴的摆动过程中,实时检测溜嘴是否存在摆动卡阻和反向摆动,若存在,则发出警报。
10、进一步的,溜嘴摆动卡阻的检测方法具体如下:
11、(21)读取溜嘴当前的摆动角度,计算溜嘴当前摆动角度与上一时刻的摆动角度差值;
12、(22)检测溜嘴当前摆动角度与上一时刻的摆动角度差值是否小于设定的角度差值,若检测结果为是,则认定溜嘴摆动存在卡阻,发出警报。
13、进一步的,若溜嘴当前摆动角度与上一时刻的摆动角度差值为负,则说明溜嘴存在反向摆动,发出警报。
14、进一步的,溜嘴计划侧或非计划侧内是否存在铁水流的检测方法具体如下:
15、拍摄包含溜嘴计划侧或非计划侧的溜嘴图像,提取溜嘴图像中的计划侧区域或非计划侧区域,计算计划侧区域或非计划侧区域的rgb平均值,当rgb平均值小于设定阈值时,则认为有溜嘴计划侧或非计划侧存在铁水流。
16、进一步的,溜嘴朝计划侧的摆动角度检测方法具体如下:
17、采集包含溜嘴计划侧的溜嘴图像,将溜嘴图像输入训练好的yolov7模型,模型yolov7输出溜嘴在图像中角度,将溜嘴在图像中的角度转换至世界坐标系下,获得溜嘴朝计划侧的摆动角度。
18、本发明是这样实现的,一种高炉摆动溜嘴的控制系统,所述系统包括:
19、设于高炉铁沟上方的第一摄像机;
20、设于高炉溜嘴上方的第二摄像机、第三摄像机;
21、与第一摄像机、第二摄像机、第三摄像机通讯连接的处理器
22、处理器与plc控制器通讯连接,plc控制器控制溜嘴的摆动;
23、第一摄像机实时拍摄高炉铁沟,发送至处理器,在检测到铁沟存在铁水流后,处理器启动第二摄像机及第三摄像机,并发送至处理器,处理器基于上述高炉摆动溜嘴的控制方法来控制溜嘴的摆动。
24、进一步的,所述系统包括:设于受铁罐下方的重力传感器,重力传感器与plc控制器通讯连接,在计划侧受铁罐下方的重力传感器将检测到的铁水重量发送至plc控制器,plc控制器将溜嘴的另一侧作为计划测,控制溜嘴摆动至计划侧的设定角度。
25、在检测到铁沟内存在铁水时,需要再次检测溜嘴当前已朝计划侧摆动了设定角度,若不是在,则需要对溜嘴的位置进行修正,控制其摆动至计划侧的设定角度,溜嘴摆动至计划侧的设定角度的情况下,溜嘴的计划侧中存在铁水,而非计划测是不存在铁水的,此时仅向计划侧的受铁罐灌入铁水,避免了溜嘴的非计划侧存在铁水而造成铁水落地的问题。
技术特征:1.一种高炉摆动溜嘴的控制方法,其特征在于,所述方法包括:
2.如权利要求1所述高炉摆动溜嘴的控制方法,其特征在于,该方法包括:在检测到溜嘴朝计划测的摆动角度达到角度阈值后,执行如下步骤:
3.如权利要求1或2所述高炉摆动溜嘴的控制方法,其特征在于,其特征在于,在溜嘴摆动至计划侧的设定角度后,控制溜嘴向计划侧的受铁罐注入铁水,在检测到计划侧的受铁罐重量达到重量阈值后,将溜嘴的另一侧作为计划侧,控制溜嘴进行摆动,摆动至计划侧的设定角度。
4.如权利要求1或2所述高炉摆动溜嘴的控制方法,其特征在于,其特征在于,在溜嘴的摆动过程中,实时检测溜嘴是否存在摆动卡阻和反向摆动,若存在,则发出警报。
5.如权利要求4所述高炉摆动溜嘴的控制方法,其特征在于,溜嘴摆动卡阻的检测方法具体如下:
6.如权利要求4所述高炉摆动溜嘴的控制方法,其特征在于,若溜嘴当前摆动角度与上一时刻的摆动角度差值为负,则说明溜嘴存在反向摆动,发出警报。
7.如权利要求2所述高炉摆动溜嘴的控制方法,其特征在于,溜嘴计划侧或非计划侧内是否存在铁水流的检测方法具体如下:
8.如权利要求1或2所述高炉摆动溜嘴的控制方法,其特征在于,溜嘴朝计划侧的摆动角度检测方法具体如下:
9.一种高炉摆动溜嘴的控制系统,其特征在于,所述系统包括:
10.如权利要求9所述高炉摆动溜嘴的控制系统,其特征在于,所述系统包括:设于受铁罐下方的重力传感器,重力传感器与plc控制器通讯连接,在计划侧受铁罐下方的重力传感器将检测到的铁水重量发送至plc控制器,plc控制器将溜嘴的另一侧作为计划测,控制溜嘴摆动至计划侧的设定角度。
技术总结本发明公开一种高炉摆动溜嘴的控制方法,包括:(1)检测铁沟中是否存在铁水流,若检测结果为是,则执行步骤(2);(2)检测溜嘴当前的摆动方向及摆动角度;(3)检测溜嘴当前是否已朝计划侧摆动了设定角度,若检测结果为否,控制溜嘴继续朝计划侧摆动,执行步骤(2)。在检测到铁沟内存在铁水时,需要再次检测溜嘴当前已朝计划侧摆动了设定角度,若不是在,则需要对溜嘴的位置进行修正,控制其摆动至计划侧的设定角度,溜嘴摆动至计划侧的设定角度的情况下,溜嘴的计划侧中存在铁水,而非计划测是不存在铁水的,此时仅向计划侧的受铁罐灌入铁水,避免了溜嘴的非计划侧存在铁水而造成铁水落地的问题。技术研发人员:陈立春,余文键,王海丰,周小红,杨正禄,钟宏平,廖忠平,邓敏受保护的技术使用者:新余钢铁股份有限公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/288340.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表