一种高精度导航模块连接器自动光学检查方法及系统与流程
- 国知局
- 2024-09-05 14:51:08
本发明涉及连接器智能检测,尤其涉及一种高精度导航模块连接器自动光学检查方法及系统。
背景技术:
1、高精度导航模块连接器是导航系统核心组件之一,对于实现高精度的定位和导航功能至关重要,目前常用人工测量判别高精度导航模块连接器是否存在弯曲、尺寸等缺陷,存在低效、不准确、难以溯源等问题。应用自动光学检查方法提升高精度导航模块连接器检测性能,成为亟待解决的问题。
2、高精度导航模块连接器自动光学检查方法,主要采用相机等图像采集设备判别连接器位置、同心度等是否满足要求。如专利cn110940270b、cn115876086b、cn116030053b等可检测连接器位置;专利cn114509027b可检测连接器同心度。
3、上述具体专利对比文件为:
4、1)、“一种连接器pin针位置度的检测方法及检测装置”,专利号cn110940270b。该专利公开了一种连接器pin针位置度的检测方法及检测装置,检测方法包括以下步骤:将待检测产品安装于检测平台上,通过对射传感器组件对待检测产品和预设标准件之间的相对位置进行检测,并根据检测结果调整待检测产品的位置,直至待检测产品处于预设标准件标定的检测位置处;通过第一视觉检测装置对待检测产品上的检测部件进行拍摄得到待检测产品图像,并确定待检测产品图像上检测部件的边线相对于基准边的位置信息;将待检测产品图像上得到的位置信息与标准产品图像中检测部件的边线相对于基准边的位置信息进行比对,计算位置度偏差,并判断待检测产品上检测部件的位置度偏差是否合格。本发明图像信息采集方法与上述不同,采用三维激光扫描仪获取连接器位置、高度信息,相比相机拍摄的图像无关背景信息大大减少,降低连接器检测难度并提升检测效率。
5、2)、“一种高密度连接器的检测方法及检测系统”,专利号cn115876086b。该专利公开了一种高密度连接器的检测方法,包括以下步骤:将包含公头、母头的机柜放置在指定位置,用相机对机柜拍摄生成图像;通过测距传感器判断机柜前后距离和左右偏差,并相应调整相机位置;通过相机对机柜上3个标记点进行目标定位,得到3组坐标,与设定的模板坐标进行对比,通过仿射变换进行坐标计算偏差值:对每个公头、母头单独拍摄,计算机对拍摄的图片中的特征进行识别,根据偏差值对特征的坐标值进行补偿,与设定的标准值进行比较,输出异常的公头、母头信息。本发明的检测方法与上述发明不同,采用三维激光扫描仪获取连接器位置、高度信息,所需数据采集设备远少于上述方法,大大降低检测成本和提高检测效率。
6、3)、“一种连接器引脚缺陷检测方法、装置、设备及介质”,专利号cn116030053b。该专利公开了一种连接器引脚缺陷检测方法、装置、设备及介质,方法包括以下步骤:获取连接器的第一图像;提取第一图像中的第一特征信息,判断第一特征信息是否属于第一类缺陷信息;其中,第一类缺陷信息为连接器引脚位置偏移;获取连接器的多张第二图像;提取多张第二图像中的第二特征信息,判断第二特征信息是否属于第二类缺陷信息;其中,第二类缺陷信息为连接器引脚长度不齐;输出检测结果。本发明与上述发明不同,本发明采用三维激光扫描仪,大幅减少无关背景干扰,相比上述方法仅需一次测量就可同时判断引脚位置是否偏移、长度不齐,减少了检测时间和复杂度。
7、4)、“连接器的同心度检测方法”,专利号cn114509027b。该专利公开一种连接器的同心度检测方法,所述连接器包括外导体和位于所述外导体中的内导体,所述方法包括以下步骤:拍摄所述连接器的端面图像;根据拍摄的所述端面图像识别所述外导体的中心c1和所述内导体的中心c2计算所述连接器的外导体和内导体的同心度c。本发明与上述发明不同,本发明采用三维激光扫描仪,大幅减少无关背景干扰;除可检测同心度还能检测位置、高度、弯曲程度等,本发明在连接器检测应用范围更广泛。
技术实现思路
1、为解决上述技术问题,本发明的目的是提供一种高精度导航模块连接器自动光学检查方法及系统。
2、本发明的目的通过以下的技术方案来实现:
3、一种高精度导航模块连接器自动光学检查方法,包括:
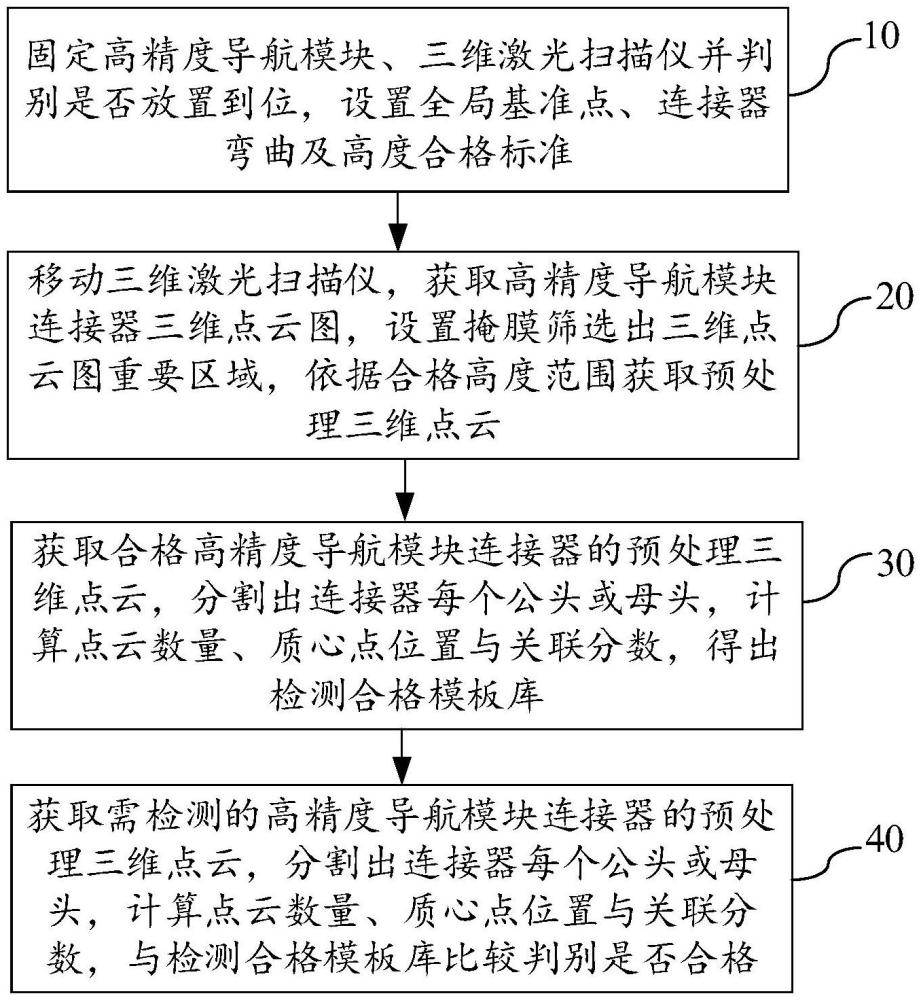
4、步骤a固定高精度导航模块和三维激光扫描仪,并判别是否放置到位,设置全局基准点、连接器弯曲度和高度的标准;
5、步骤b获取高精度导航模块连接器三维点云图,设置掩膜筛选出三维点云图重要区域,依据合格高度范围获取预处理三维点云;
6、步骤c获取合格高精度导航模块连接器的预处理三维点云,分割出连接器每个公头、母头,计算点云数量、质心点位置与关联分数,得出检测合格模板库;
7、步骤d获取需检测的高精度导航模块连接器的预处理三维点云,分割出连接器每个公头或母头,计算点云数量、质心点位置与关联分数,并与检测合格模板库比较判别是否合格。
8、一种高精度导航模块连接器自动光学检查系统,包括:
9、水平工作台,通过夹具固定高精度导航模块;
10、三维激光扫描仪,用于获取高精度导航模块连接器三维点云图,并判别高精度导航模块连接器是否放置到位。
11、所述三维激光扫描仪安装在可移动导轨并使发射光线垂直于水平工作台;
12、所述高精度导航模块位置的判断:三维点云具有等高特性则判别高精度导航模块连接器放置到位。
13、与现有技术相比,本发明的一个或多个实施例可以具有如下优点:
14、通过三维激光扫描仪,可以获取高精度导航模块连接器位置、高度信息,相比传统相机减少无关背景干扰;依据三维点云图可快速判别高精度导航模块连接器公头或母头是否存在弯曲、高度不符合标准等问题,并可应用于各种不同形状、密集连接器,提高高精度导航模块连接器检测应用范围。该方法具有检测精度高、操作简单、劳动成本低的特点,具有实际意义和推广价值。
技术特征:1.一种高精度导航模块连接器自动光学检查方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的高精度导航模块连接器自动光学检查方法,其特征在于,所述a中全局基准点为p,p设为三维点云图原点(0,0,0),三维点云(x,y,z)与p点在空间坐标x轴、y轴、z轴距离作为定量判别连接器弯曲及高度是否合格的依据;按要求设定连接器弯曲合格标准偏差为δ、与方差为σ,高度合格标准偏差为λ。
3.根据权利要求2所述的高精度导航模块连接器自动光学检查方法,其特征在于,所述b中,移动三维激光扫描仪,获取高精度导航模块连接器三维点云图,其中,高精度导航模块连接器的初始三维点云图f={(x1,y1,z1),(x2,y2,z2),...,(xn,yn,zn)},在三维点云图f上标记掩膜外轮廓m={(a1,b1),(a2,b2),...,(am,bm)}去除无关检测区域,得新三维点云图
4.根据权利要求3所述的高精度导航模块连接器自动光学检查方法,其特征在于,在新三维点云图选取合格高度h范围内三维点云,构成高精度导航模块连接器预处理三维点云图q:
5.根据权利要求4所述的高精度导航模块连接器自动光学检查方法,其特征在于,所述步骤c中,获取合格的高精度导航模块连接器的预处理三维点云图qn,根据qn每个三维点云相邻关系划分出l个连通域,由连通域分割出连接器公头或母头;计算连接器公头或母头三维点云图点云数量质心点位置与关联分数并构造检测合格模板库
6.根据权利要求5所述的高精度导航模块连接器自动光学检查方法,其特征在于,所述步骤d中,获取需检测的高精度导航模块连接器的预处理三维点云qw,计算连接器公头或母头三维点云图点云数量质心点位置与关联分数与检测合格模板库t比较判别是否合格:
7.根据权利要求1-6任一项所述的高精度导航模块连接器自动光学检查系统,其特征在于,包括:
8.根据权利要求7所述的高精度导航模块连接器自动光学检查系统,其特征在于,所述三维激光扫描仪安装在可移动导轨并使发射光线垂直于水平工作台;
技术总结本发明公开了一种高精度导航模块连接器自动光学检查方法及系统,所述方法包括固定高精度导航模块和三维激光扫描仪,并判别是否放置到位,设置全局基准点、连接器弯曲度和高度的标准;获取高精度导航模块连接器三维点云图,设置掩膜筛选出三维点云图重要区域,依据合格高度范围获取预处理三维点云;获取合格高精度导航模块连接器的预处理三维点云,分割出连接器每个公头、母头,计算点云数量、质心点位置与关联分数,得出检测合格模板库;获取需检测的高精度导航模块连接器的预处理三维点云,分割出连接器每个公头或母头,计算点云数量、质心点位置与关联分数,并与检测合格模板库比较判别是否合格。本发明能够提高精度导航模块连接器自动光学检查鲁棒性、泛化性。技术研发人员:林镇秋,黄瑛娜,蓝俊伟,张翔受保护的技术使用者:广州市华颉电子科技有限公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/288464.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。