一种绳驱连续型机械臂智能实验平台及其使用方法
- 国知局
- 2024-09-05 14:52:38
本发明涉及机械臂,尤其是涉及一种绳驱连续型机械臂智能实验平台及其使用方法。
背景技术:
1、工业机械臂在智能制造、航空航天、康复医疗等领域发挥着重要作用。传统的机械臂形体较大、灵活度差,在空间复杂、障碍密集环境中应用受限。绳驱连续型机械臂属于特殊作业机械臂,采用电机-绳索驱动,具有体型小、响应快、灵活性强、易于操作的优势,在航空发动机叶片探伤、太空垃圾捕获、微创手术等特殊作业领域具有切实的应用场景。但是绳索驱动本身存在的传动链路长,摩擦、间隙等非线性因素的影响大等问题,使得绳驱连续型机械臂的理论模型与真实运动误差较大,末端执行设备跟踪控制精度较低。为了提高绳驱连续型机械臂的理论模型预测精度,对运动控制过程中的轨迹偏差进行补偿,需要通过大量样机实验获得数据样本。因此,有必要建立一种绳驱连续型机械臂智能实验平台及其使用方法。
技术实现思路
1、为了解决上述问题,本发明提出一种绳驱连续型机械臂智能实验平台及其使用方法,采用电机-绳索驱动机械臂实现各种空间运动构型,利用高速相机等测量手段捕捉机械臂运动过程的实时位姿及绳索拉力等信息,分析实验数据,修正理论预测模型和控制补偿方案。
2、本发明实施例解决上述技术问题所采取的技术方案是:提供一种绳驱连续型机械臂智能实验平台及其使用方法,包括柔性机械臂模块、驱动模块、框架模块和智能测量模块。所述框架模块与所述驱动模块固定连接,所述驱动模块与所述柔性机械臂模块通过驱动绳索相连接。所述柔性机械臂模块包括柔性支撑梁、节盘、刚性节盘以及穿过所述节盘和所述刚性节盘的驱动绳索,所述节盘和所述刚性节盘与所述柔性支撑梁固定连接,且间隔分布在所述柔性支撑梁的长度方向。所述驱动模块包括驱动电机和直线模组,直线模组与驱动绳索的一端连接,可以将驱动电机的旋转运动转变为直线往复运动。所述柔性支撑梁一端与所述框架模块的第一框架的一端固定连接;所述驱动绳索排布在所述节盘与所述刚性节盘周向,所述驱动绳索末端与所述刚性节盘固定连接。
3、进一步限定所述驱动模块包括驱动电机和直线模组,呈环形均布;所述直线模组与所述驱动绳索的一端连接,所述直线模组将所述驱动电机的旋转运动转变为直线往复运动,从而拉动所述驱动绳索做直线往复运动,使所述柔性机械臂模块产生变形。
4、进一步限定所述智能测量模块包括位姿测量单元、长度测量单元、拉力测量单元,所述位姿测量单元与所述第三框架固定连接,所述长度测量单元与所述驱动模块固定连接,所述驱动模块与所述驱动绳索通过所述拉力测量单元连接。
5、进一步限定所述框架模块包括第一框架、第二框架、第三框架,所述第一框架、所述第二框架与所述第三框架固定连接,所述框架模块支撑所述绳驱连续型机械臂智能实验平台。
6、进一步限定若干个所述驱动模块组成驱动箱,所述驱动箱上设有滑轮单元,所述滑轮单元包括内滑轮、外滑轮,用于改变所述驱动绳索之间的径向距离;所述直线模组上设有丝杠、滑轨和可以沿所述滑轨滑动的滑块,所述滑块与所述拉力测量单元固定连接。
7、进一步限定所述位姿测量单元由高速摄像机模块和标记球模块组成,所述高速摄像机模块与所述第三框架固定连接,所述高速摄像机通过识别固定安装于所述刚性节盘上的所述标记球模块可以测量所述柔性机械臂模块不同时刻的空间位姿。
8、进一步限定所述长度测量单元包括读磁头和磁尺,所述磁尺与所述滑轨固定连接,所述读磁头与所述滑块固定连接,所述滑块带动所述读磁头做直线往复运动,所述读磁头可以测量所述滑块和所述驱动绳索的运动距离。
9、进一步限定所述拉力测量单元包括连接件以及拉力传感器和吊环螺钉,所述连接件与所述滑块固定连接,所述拉力传感器与所述连接件固定连接,所述吊环螺钉一端与所述拉力传感器固定连接,所述吊环螺钉另一端与所述驱动绳索固定连接。
10、进一步限定所述的一种绳驱连续型机械臂智能实验平台及其使用方法,还包括一套控制系统,所述控制系统置于所述框架模块内部,通过所述控制系统控制整个装置的协调运行。
11、进一步限定所述的一种绳驱连续型机械臂智能实验平台的使用方法,包括以下步骤:
12、s1.将控制参数输入计算机,通过绳驱连续型机械臂的理论预测模型软件,求解所述柔性机械臂模块的预期空间位资。
13、s2.将所述控制参数输入所述绳驱连续型机械臂智能实验平台,所述控制系统根据所述控制参数使所述驱动模块运动,并拉动所述驱动绳索运动,使所述柔性机械臂模块产生变形。
14、s3.所述智能测量模块捕捉所述柔性机械臂模块运动过程的实时位姿及所述驱动绳索拉力等信息。
15、s4.将实验数据导入计算机对比分析软件,与所述绳驱连续型机械臂的理论预测模型进行对比分析,并修正所述绳驱连续型机械臂的理论预测模型和控制补偿方案。
16、进一步限定所述绳驱连续型机械臂的理论预测模型软件和所述对比分析软件基于matlab软件编写。
17、本发明的优点在于:
18、本发明的绳驱连续型机械臂智能实验平台及其使用方法,可以模拟不同工况下的绳驱连续型机械臂的真实运动,利用高速相机等测量手段捕捉机械臂运动过程的实时位姿及绳索拉力等信息,分析实验数据,并与理论模型对比,进而对理论模型进行修正。
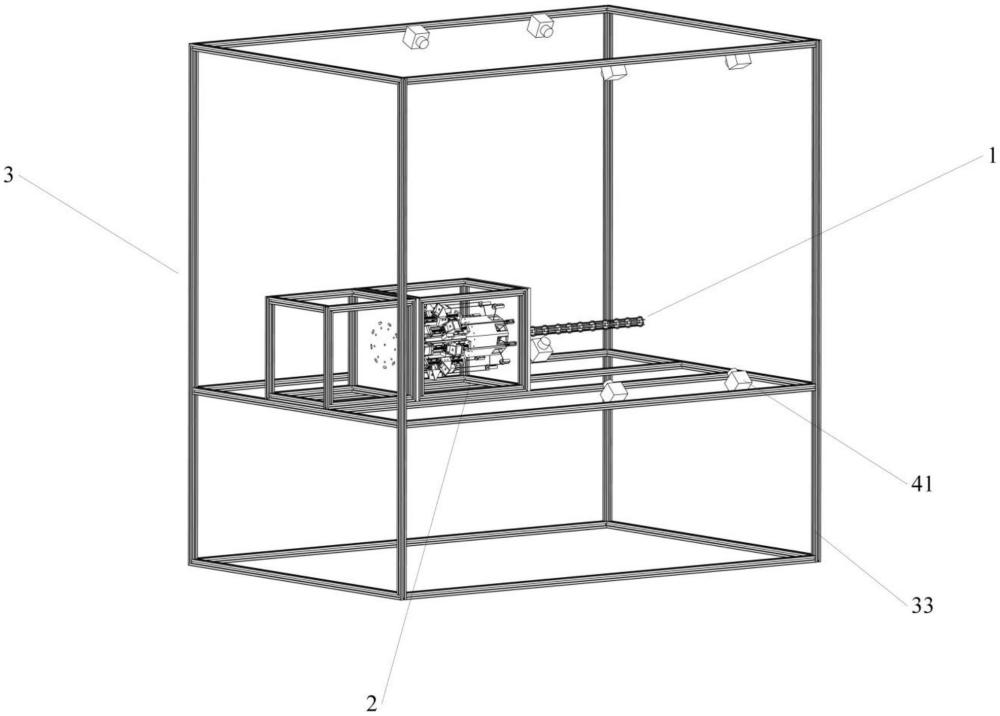
技术特征:1.一种绳驱连续型机械臂智能实验平台,其特征在于,包括:柔性机械臂模块(1)、驱动模块(2)、框架模块(3)和智能测量模块;所述框架模块(3)与所述驱动模块(2)固定连接,所述驱动模块(2)与所述柔性机械臂模块(1)通过驱动绳索(14)相连接;所述柔性机械臂模块(1)包括柔性支撑梁(11)、节盘(12)、刚性节盘(13)、以及穿过所述节盘(12)和所述刚性节盘(13)的所述驱动绳索(14);所述节盘(12)和所述刚性节盘(13)与所述柔性支撑梁(11)固定连接,且间隔分布在所述柔性支撑梁(11)的长度方向;所述柔性支撑梁(11)一端与所述框架模块(3)的第一框架(31)的一端固定连接;所述驱动绳索(14)排布在所述节盘(12)与所述刚性节盘(13)周向,所述驱动绳索(14)末端与所述刚性节盘(13)固定连接。
2.根据权利要求1所述的一种绳驱连续型机械臂智能实验平台,其特征在于,所述驱动模块(2)包括驱动电机(21)和直线模组(22),呈环形均布;所述直线模组(22)与所述驱动绳索(14)的一端连接,所述直线模组(22)将所述驱动电机(21)的旋转运动转变为直线往复运动,从而拉动所述驱动绳索(14)做直线往复运动,使所述柔性机械臂模块(1)产生变形。
3.根据权利要求1所述的一种绳驱连续型机械臂智能实验平台,其特征在于,所述智能测量模块包括位姿测量单元、长度测量单元、拉力测量单元,所述位姿测量单元与所述第三框架(33)固定连接,所述长度测量单元与所述驱动模块(2)固定连接,所述驱动模块(2)与所述驱动绳索(14)通过所述拉力测量单元连接。
4.根据权利要求1所述的一种绳驱连续型机械臂智能实验平台,其特征在于,所述框架模块(3)包括第一框架(31)、第二框架(32)、第三框架(33),所述第一框架(31)、所述第二框架(32)与所述第三框架(33)固定连接,所述框架模块(3)支撑所述绳驱连续型机械臂智能实验平台。
5.根据权利要求2所述的一种绳驱连续型机械臂智能实验平台,其特征在于,若干个所述驱动模块(2)组成驱动箱,所述驱动箱上设有滑轮单元,所述滑轮单元包括内滑轮(26)、外滑轮(27),用于改变所述驱动绳索(14)之间的径向距离;所述直线模组(22)上设有丝杠(23)、滑轨(24)和可以沿所述滑轨(24)滑动的滑块(25),所述滑块(25)与所述拉力测量单元固定连接。
6.根据权利要求3所述的一种绳驱连续型机械臂智能实验平台,其特征在于,所述位姿测量单元由高速摄像机模块(41)和标记球模块(42)组成,所述高速摄像机模块(41)与所述第三框架(33)固定连接,所述高速摄像机(41)通过识别固定安装于所述刚性节盘(13)上的所述标记球模块(42)可以测量所述柔性机械臂模块(1)不同时刻的空间位姿。
7.根据权利要求3所述的一种绳驱连续型机械臂智能实验平台,其特征在于,所述长度测量单元包括读磁头(44)和磁尺(45),所述磁尺(45)与所述滑轨(24)固定连接,所述读磁头(44)与所述滑块(25)固定连接,所述滑块(25)带动所述读磁头(44)做直线往复运动,所述读磁头(44)可以测量所述滑块(25)和所述驱动绳索(14)的运动距离。
8.根据权利要求3所述的一种绳驱连续型机械臂智能实验平台,其特征在于,所述拉力测量单元包括连接件(46)以及拉力传感器(47)和吊环螺钉(48),所述连接件(46)与所述滑块(25)固定连接,所述拉力传感器(47)与所述连接件(46)固定连接,所述吊环螺钉(48)一端与所述拉力传感器(47)固定连接,所述吊环螺钉(48)另一端与所述驱动绳索(14)固定连接。
9.根据权利要求1所述的一种绳驱连续型机械臂智能实验平台,其特征在于,还包括一套控制系统,所述控制系统置于所述框架模块(3)内部,通过所述控制系统控制整个装置的协调运行。
10.根据权利要求1-9中任意一项所述的一种绳驱连续型机械臂智能实验平台的使用方法,其特征在于,包括以下步骤:
技术总结本发明公开了一种绳驱连续型机械臂智能实验平台及其使用方法,本发明的绳驱连续型机械臂实验平台包括:柔性机械臂模块、驱动模块、框架模块和智能测量模块;所述柔性机械臂模块包括柔性支撑梁、节盘、刚性节盘、驱动绳索;所述驱动模块包括驱动电机和直线模组;所述框架模块包括第一框架、第二框架和第三框架;所述智能测量模块包括位姿测量单元、长度测量单元和拉力测量单元,位姿测量单元与第三框架固定连接,长度测量单元与驱动模块连接,拉力测量单元与驱动绳索连接;本发明的绳驱连续型机械臂实验平台能模拟不同控制参数下的机械臂运动,获得机械臂的空间位姿,控制精度高,可验证绳驱连续型机械臂动力学模型的有效性和准确性。技术研发人员:张欣刚,赵佳源,王天奎,张树翠,肖利萍,姚文莉,王勇受保护的技术使用者:青岛理工大学技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/288648.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表