利用使用偏转夹持器的可编程运动装置进行对象处理的系统和方法与流程
- 国知局
- 2024-09-05 14:41:56
背景技术:
1、本发明总体上涉及可编程运动系统,并且具体地涉及用于在诸如对象分拣系统的对象处理系统中使用的可编程运动装置(例如,机器人系统)的末端执行器。
2、例如,在某些应用中,可采用用于机器人系统的末端执行器来选择和抓持对象,并且接着非常快速地将所获取的对象移动到新位置。末端执行器应被设计成从一堆不同的对象中快速并且容易地选择和抓持对象,并且应被设计成在移动期间牢固地抓持对象。当在具有不同物理大小,重量和材料的不同对象上使用时,某些末端执行器可具有关于它们可如何牢固地抓持所获取的对象,以及在快速移动,尤其是快速加速和减速(角度和线性两者)期间它们可如何牢固地维持对该对象的抓持的限制。此外,在某些应用中,可能期望以所需的取向或姿势将对象放置在目的地处,尤其是相对于诸如由机器人系统包装的容器的环境。
3、许多末端执行器采用真空压力来获取并且固定对象,以便通过铰接臂进行运输和/或后续操作。用于获取并且固定对象的其他技术涉及静电吸引、磁吸引、用于穿透诸如织物的对象的针、挤压对象的手指、接合并且提升对象的突出特征的钩和在对象的开口中膨胀的夹头以及其他技术。
4、在使用真空压力来获取并且固定对象的应用中,铰接臂上的末端执行器可包括真空吸盘,所述真空吸盘具有接触待抓持对象的顺应部分,例如波纹管部分。柔顺部分可由聚合物或弹性体材料形成,所述聚合物或弹性体材料足够柔性以允许其改变其形状以适应对象表面结构的变化,以及适应铰接臂与对象之间变化的物理关系,诸如例如接近对象的变化角度。柔性进一步允许真空吸盘符合对象的形状或环绕对象的拐角以产生用于获取并且固定对象的适当密封。当在柔性真空吸盘与对象之间没有产生良好的密封时,系统可能无法实现所需的真空水平,或者有时由于真空吸盘在对象上的定位,它可能产生大量的噪音。
5、包括具有较差柔性顺应部分的真空吸盘的其他类型的末端执行器(除了使用静电吸引,磁吸引,用于穿透诸如织物的对象的针,挤压对象的手指,接合并且提升对象的突出特征的钩和在对象的开口中膨胀的夹头之外)在获取和移动各种对象方面效率较低。
6、然而,真空末端执行器在其以期望的取向或姿势放置对象的能力方面可能受到限制,诸如在将对象包装到盒子或容器中时。例如,包装清单可能要求以特定取向或姿势放置某些对象,和/或容器内用于包装的可用空间可能受到相对于对象的小包装余量的限制。在某些应用中,考虑期望的放置姿势或取向(例如,在容器中)可增加对包括真空末端执行器的可编程运动装置(例如,机器人系统)的轨迹规划和运动要求的需求。此类增加的需求可能增加放置所需的时间,这可能降低对象处理系统的吞吐量。
7、机器人系统需要相对于环境精确放置对象的此类应用包括例如将多单元电子商务订单包装到容器中、将单个单元包装到自动装袋系统中、包装或加固在自动存储和取回系统(as/rs)中使用的容器,以及在诸如条形码扫描器或rfid扫描器的扫描器前面扫描对象。对对象姿势和取向的更有效管理还可增加对象处理系统管理大量不同对象的能力。
8、因此,仍然需要通过有效地调整对象的放置姿势或取向而不对吞吐量产生不利影响来更高效和有效地包装和操纵对象的系统和方法。
技术实现思路
1、根据一个方面,本发明提供一种用于与可编程运动装置一起使用的末端执行器系统。末端执行器系统包括:臂附接部分,其用于附接到可编程运动装置的臂;末端执行器附接部分,其用于附接到用于抓持对象的末端执行器;旋转轴部分,其用于旋转地附接到臂附接部分,所述旋转轴部分在其远端处联接到末端执行器附接部分;和马达系统,其提供旋转轴部分以及末端执行器附接部分相对于臂附接部分的旋转。
2、根据另一方面,本发明提供一种用于与可编程运动装置一起使用的末端执行器系统。末端执行器系统包括用于附接到可编程运动装置的臂的臂附接部分,所述臂附接部分在轴向方向上延伸并且包括具有面向内的驱动花键的花键齿轮。末端执行器系统还包括:末端执行器附接部分,其用于附接到用于抓持对象的末端执行器;和花键轴部分,其由臂附接部分接纳,所述花键轴部分在其远端处联接到末端执行器附接部分,并且包括轴花键,所述轴花键接合花键齿轮的驱动花键以允许花键轴相对于臂附接部分在轴向方向上移动。
3、根据另一方面,本发明提供一种用于与可编程运动装置一起使用的末端执行器系统。末端执行器系统包括:臂附接部分,其用于附接到可编程运动装置的臂;末端执行器附接部分,其用于附接到用于抓持对象的末端执行器;和旋转轴部分,其用于在其远端处附接到臂附接部分和末端执行器部分,所述旋转轴部分可相对于臂附接部分旋转并且可相对于臂附接部分轴向移动。
4、根据另一方面,本发明提供一种操作包括末端执行器的可编程运动装置的方法。所述方法包括:用末端执行器的远端沿着第一方向接近待抓持的对象;用末端执行器的远端抓持对象;以及使末端执行器的远端与对象一起围绕与第一方向基本平行的第一轴线旋转。
技术特征:1.一种用于与可编程运动装置一起使用的末端执行器系统,所述末端执行器系统包括:
2.如权利要求1所述的末端执行器系统,其中所述马达系统包括用于与附接到所述旋转轴部分的花键齿轮接合的蜗杆。
3.如权利要求1至2中任一项所述的末端执行器系统,其中所述旋转轴部分是包括多个轴花键的花键轴,并且其中所述马达系统包括在其内环形表面上的驱动花键,所述驱动花键接合所述花键轴的所述轴花键。
4.如权利要求3所述的末端执行器系统,其中所述花键齿轮包括在其外环形表面上的齿以用于接合所述马达系统的所述蜗杆。
5.如权利要求1至4中任一项所述的末端执行器系统,其中所述末端执行器附接部分沿着轴向方向延伸并且被允许相对于所述臂附接部分沿着所述轴向方向移动。
6.如权利要求5所述的末端执行器系统,其中所述末端执行器附接部分相对于所述臂附接部分的所述轴向移动被弹簧偏置。
7.如权利要求1至6中任一项所述的末端执行器系统,其中所述旋转轴部分包括在所述旋转轴部分的与所述远端相对的近端处的真空软管连接器,所述真空软管连接器适于接合在真空软管的远端处的真空软管末端。
8.如权利要求7所述的末端执行器系统,其中所述真空软管连接器包括环形轴联接件,所述环形轴联接件接合所述真空软管连接器内的圆环形软管联接件,从而形成开放的球形接头结构。
9.如权利要求8所述的末端执行器系统,其中所述环形轴联接件和所述圆环形软管联接件的所述接合允许所述旋转轴部分相对于所述真空软管末端在两个自由度中移动。
10.如权利要求1至9中任一项所述的末端执行器系统,其中所述马达系统包括马达轴的用于所述马达轴的手动旋转的暴露部分。
11.如权利要求1至10中任一项所述的末端执行器系统,其中所述末端执行器系统包括吸盘检测传感器系统,所述吸盘检测传感器系统包括螺旋布线部分,所述螺旋布线部分适应所述旋转轴部分相对于所述臂附接部分的移动。
12.一种用于与可编程运动装置一起使用的末端执行器系统,所述末端执行器系统包括:
13.如权利要求12所述的末端执行器系统,其中所述花键轴相对于所述臂附接部分在所述轴向方向上的所述移动被弹簧偏置。
14.如权利要求12至13中任一项所述的末端执行器系统,其中所述臂附接部分还包括马达和蜗杆,所述蜗杆接合所述花键齿轮以使所述花键轴相对于所述臂附接部分旋转。
15.如权利要求12至14中任一项所述的末端执行器系统,其中所述花键轴部分包括在所述花键轴部分的与所述远端相对的近端处的真空软管连接器,所述真空软管连接器适于接合在真空软管的远端处的真空软管末端。
16.如权利要求15所述的末端执行器系统,其中所述真空软管连接器包括环形轴联接件,所述环形轴联接件接合圆环形软管联接件与所述真空软管连接器。
17.如权利要求15所述的末端执行器系统,其中所述环形轴联接件和所述圆环形软管联接件允许所述花键轴部分相对于所述真空软管末端在至少两个自由度中移动。
18.如权利要求12至17中任一项所述的末端执行器系统,其中所述马达系统包括马达轴的适于所述马达轴的手动旋转的暴露部分。
19.如权利要求12至18中任一项所述的末端执行器系统,其中所述末端执行器系统包括吸盘检测传感器系统,所述吸盘检测传感器系统包括螺旋布线部分,所述螺旋布线部分适应所述旋转轴部分相对于所述臂附接部分的移动。
20.一种用于与可编程运动装置一起使用的末端执行器系统,所述末端执行器系统包括:
21.如权利要求20所述的末端执行器系统,其中所述末端执行器系统还包括马达系统,所述马达系统提供所述旋转轴部分以及所述末端执行器附接部分相对于所述臂附接部分的旋转。
22.如权利要求21所述的末端执行器系统,其中所述马达系统包括用于与花键齿轮接合的蜗杆,所述花键齿轮可滑动地附接到所述旋转轴部分。
23.如权利要求20至22中任一项所述的末端执行器系统,其中所述旋转轴部分是包括多个轴花键的花键轴,并且其中所述花键齿轮包括接合所述花键轴的所述轴花键的驱动花键。
24.如权利要求23所述的末端执行器系统,其中所述花键齿轮在其外环形表面上包括齿以用于接合所述马达系统的蜗杆。
25.如权利要求20至24中任一项所述的末端执行器系统,其中所述末端执行器附接部分沿着轴向方向延伸并且被允许相对于所述臂附接部分沿着所述轴向方向移动。
26.如权利要求25所述的末端执行器系统,其中所述末端执行器附接部分相对于所述臂附接部分的所述轴向移动被弹簧偏置。
27.如权利要求20至26中任一项所述的末端执行器系统,其中所述马达系统包括马达轴的适于所述马达轴的手动旋转的暴露部分。
28.如权利要求27所述的末端执行器系统,其中所述暴露部分包括便于抓持的表面。
29.如权利要求20至28中任一项所述的末端执行器系统,其中所述末端执行器系统包括吸盘检测传感器系统,所述吸盘检测传感器系统包括螺旋布线部分,所述螺旋布线部分适应所述旋转轴部分相对于所述臂附接部分的移动。
30.如权利要求29所述的末端执行器系统,其中所述螺旋布线部分包括第一螺旋部分,所述第一螺旋部分适应所述旋转轴部分相对于所述臂附接部分的轴向移动。
31.如权利要求29所述的末端执行器系统,其中所述螺旋布线部分包括在所述旋转轴部分内的第二螺旋部分,所述第二螺旋部分适应所述旋转轴部分相对于所述臂附接部分的旋转移动。
32.如权利要求29所述的末端执行器系统,其中所述吸盘检测传感器系统包括弹性体带,所述弹性体带便于传感器布线进入所述旋转轴部分,同时在所述末端执行器处维持足够的真空。
33.一种操作包括末端执行器的可编程运动装置的方法,所述方法包括:
34.如权利要求33所述的方法,其中所述第一轴线与所述第一方向重合。
35.如权利要求33至34中任一项所述的方法,其中所述方法还包括允许所述末端执行器的所述远端相对于所述可编程运动装置沿着所述第一轴线移动。
36.如权利要求33至35中任一项所述的方法,其中所述末端执行器的所述远端相对于所述可编程运动装置的所述移动被弹簧偏置。
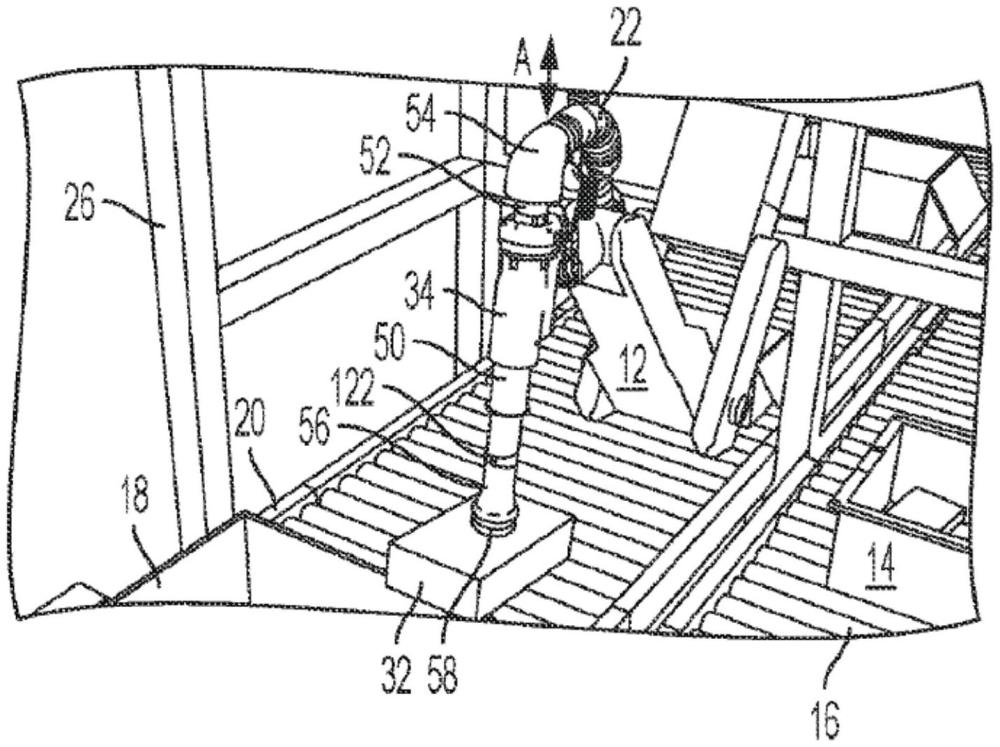
技术总结公开了一种用于与可编程运动装置(12)一起使用的末端执行器系统(30)。所述末端执行器系统(30)包括:臂附接部分(34),其用于附接到所述可编程运动装置(12)的臂;末端执行器附接部分(30),其用于附接到用于抓持对象(32)的末端执行器(30);旋转轴部分(50),其用于旋转地附接到所述臂附接部分(34),所述旋转轴部分(50)在其远端处联接到所述末端执行器附接部分(30);和马达系统(42),其提供所述旋转轴部分(50)以及所述末端执行器附接部分(30)相对于所述臂附接部分(34)的旋转。技术研发人员:B·安德森,J·亚普,W·C-H·麦克马汉,C·图塞克,W·法默受保护的技术使用者:伯克希尔格雷营业股份有限公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/287672.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表