连接结构、胯部组件和人形机器人的制作方法
- 国知局
- 2024-09-05 14:39:28
本技术涉及人形机器人,具体涉及一种连接结构、胯部组件和人形机器人。
背景技术:
1、人形机器人能够模仿人体的外形和运动姿态,具有广阔的发展前景。和人体类似,人形机器人的结构包括腿部组件、胯部组件和腰部组件等,胯部组件连接在腿部组件和腰部组件之间。
2、胯部组件的连接结构连接人形机器人左右方向上间隔设置的两个髋关节机构,现有的两个髋关节机构之间连接不够稳定。
技术实现思路
1、本技术的目的是提供一种连接结构、胯部组件和人形机器人,可以提高连接结构的连接稳定性。
2、为实现本技术的目的,本技术提供了如下的技术方案:
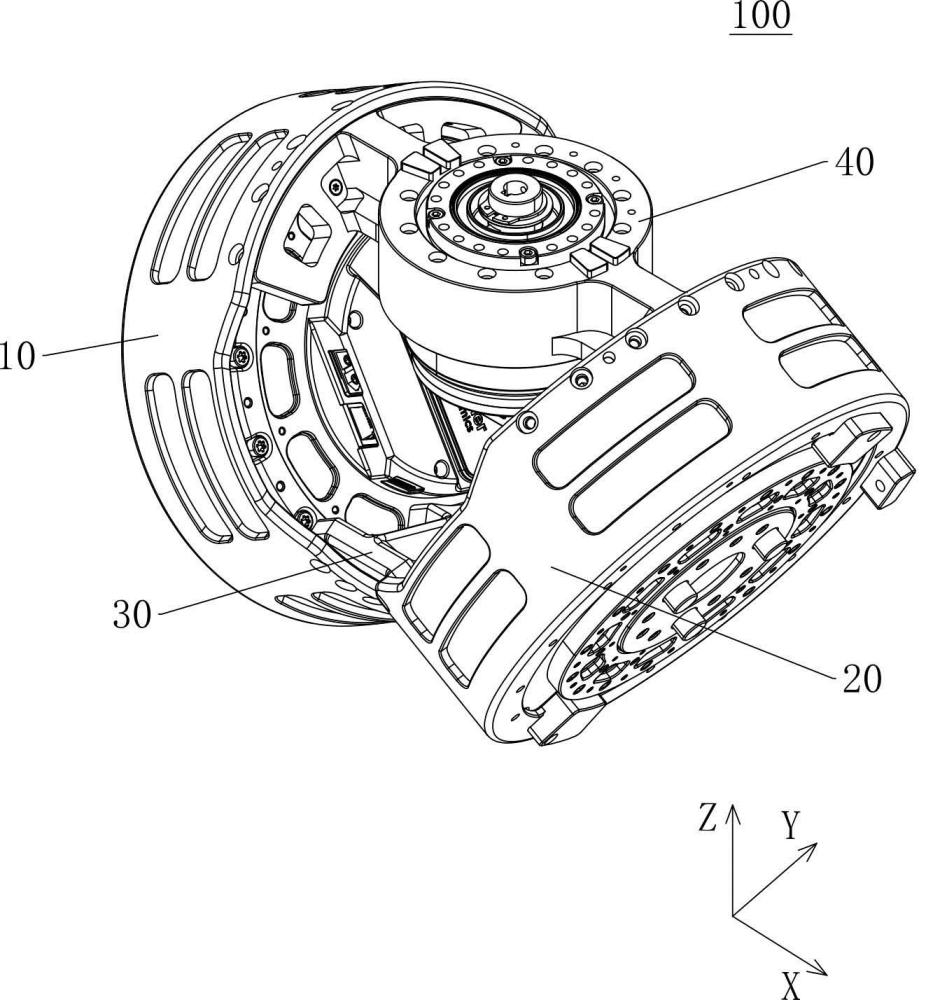
3、第一方面,本技术提供一种连接结构,用于人形机器人的胯部组件,所述胯部组件包括在第一方向上相对设置的第一髋关节机构和第二髋关节机构,所述第一髋关节机构包括第一俯仰驱动件,所述第二髋关节机构包括第二俯仰驱动件,所述连接结构包括:
4、第一连接件,用于设置在所述第一俯仰驱动件和所述第二俯仰驱动件之间,并连接固定所述第一俯仰驱动件和所述第二俯仰驱动件的一端;
5、第二连接件,用于设置在所述第一俯仰驱动件和所述第二俯仰驱动件之间,并连接固定所述第一俯仰驱动件和所述第二俯仰驱动件的另一端,且所述第二连接件与所述第一连接件在第二方向上间隔设置,所述第二方向与所述第一方向相交。
6、本技术通过采用连接结构,通过设置具有间隔的第一连接件和第二连接件,第一连接件连接固定第一俯仰驱动件和第二俯仰驱动件的一端,第二连接件连接固定第一俯仰驱动件和第二俯仰驱动件的另一端,第一俯仰驱动件和第二俯仰驱动件通过第一连接件和第二连接件连接固定,可以提高连接稳定性。
7、一种实施方式中,所述第一连接件在所述第一方向上的尺寸小于所述第二连接件在所述第一方向上的尺寸。如此设置,相比于目前的俯仰驱动件的轴线与第二方向垂直的方案,可使得腿部组件的轴线与胯部组件的轴线在第一方向距离更近,与人体结构更类似,使得胯部组件驱动腿部组件做行走动作时,行走动作更拟人。
8、一种实施方式中,所述第一连接件包括主体部、第一接触部和第二接触部,所述第一接触部和所述第二接触部连接在所述主体部在所述第一方向上相背的两侧,所述第一接触部用于与所述第一俯仰驱动件连接,所述第二接触部用于与所述第二俯仰驱动件连接。如此设置,第一接触部与第一俯仰驱动件连接,第二接触部与第二俯仰驱动件连接,第一连接件连接固定第一俯仰驱动件和第二俯仰驱动件的一端,结构简单,连接稳定。
9、一种实施方式中,所述主体部包括在所述第一方向上相背的第一面和第二面,所述第一接触部与所述第一面连接,所述第二接触部与所述第二面连接,所述第一面和所述第二面具有第一夹角b,满足:0°<b≤140°。两个俯仰驱动件斜置设置以缩短距离,而第一夹角b设置合适的角度,以使第一面和第二面之间具有夹角,进而使第一接触部呈斜置状态,与第一俯仰驱动件的斜置角度近似,连接更稳定。若第一夹角b过大,在人形机器人的左右方向上,腿部组件向外转动时也可能因与第一俯仰驱动件的第二面接触而干涉,限制了腿部组件向外转动时角度范围。因此设置第一夹角b在上述范围内时,能够获得较为和人体运动姿态类似的转动角度,可具有良好的仿人效果。
10、一种实施方式中,所述第一连接件还包括在第三方向上依次连接的第一部、连接部和第二部,所述第一部和所述第二部均用于在所述第二方向上连接所述第一俯仰驱动件和所述第二俯仰驱动件,所述第三方向与所述第一方向和所述第二方向均相交。第一接触部和第二接触部在第三方向对称设置于主体部的两侧,第一部和第二部在第一方向对称设置于连接部的两侧,第一连接件在第二方向和第三方向均为对称结构,加工简单,且装配时仅需区分第一连接件在第二方向的朝向,便于装配。
11、一种实施方式中,所述第一部包括背向所述第二连接件的第一连接面,所述第二部包括背向所述第二连接件的第二连接面,所述第一连接面和所述第二连接面均用于连接所述第一俯仰驱动件和所述第二俯仰驱动件,且所述第一连接面和所述第二连接面在所述第一方向的正投影中均为弧线。如此设置,由于第一俯仰驱动件和第二俯仰驱动件均包括筒状外壳,第一连接面和第二连接面与第一俯仰驱动件和第二俯仰驱动件的外壳形状相似,连接更紧密,可以提高连接稳定性。
12、一种实施方式中,所述第二连接件包括筒体、第一连接板和第二连接板,所述第一连接板和所述第二连接板连接在所述筒体的外周面相背的两侧,所述第一连接板用于与所述第一俯仰驱动件连接,所述第二连接板用于与所述第二俯仰驱动件连接;所述筒体相对沿所述第二方向延伸的第一轴线对称,且所述第一连接板和所述第二连接板均相对所述第一轴线倾斜。通过设置筒体、第一连接板和第二连接板,腰部驱动件的至少部分可以收容在筒体的收容腔中,可以提高空间利用率,斜置的第一连接板和第二连接板分别与第一俯仰驱动件和第二俯仰驱动件连接,可以使得两个俯仰驱动件之间的距离缩短,节省空间。
13、一种实施方式中,所述第一连接板包括背向所述筒体的第一表面,所述第一表面用于与所述第一俯仰驱动件连接,所述第一表面与所述第一轴线具有第二夹角a1,满足:0°<a1≤70°。设置第二夹角a1大于0°,在两个俯仰驱动件斜置设置以缩短距离、节省空间时,第一连接板的倾斜角度与第一俯仰驱动件类似,连接更稳定,而第二夹角a1过大会对腿部组件的转动角度范围造成限制,仿人效果不佳,而第二夹角a1和第三夹角a2在上述范围内时,能够获得较为和人体运动姿态类似的转动角度,可具有良好的仿人效果。
14、第二方面,本技术还提供一种胯部组件,包括在所述第一方向上间隔设置的第一髋关节机构和第二髋关节机构和如第一方面各种实施方式中任一项所述的连接结构,所述第一髋关节机构包括第一俯仰驱动件,所述第二髋关节机构包括第二俯仰驱动件,所述第一连接件设置在所述第一俯仰驱动件和所述第二俯仰驱动件之间,并连接固定所述第一俯仰驱动件和所述第二俯仰驱动件的一端;所述第二连接件设置在所述第一俯仰驱动件和所述第二俯仰驱动件之间,并连接固定所述第一俯仰驱动件和所述第二俯仰驱动件的另一端,且所述第二连接件与所述第一连接件在所述第二方向上间隔设置。通过设置具有间隔的第一连接件和第二连接件,第一俯仰驱动件和第二俯仰驱动件的两端分别通过第一连接件和第二连接件连接固定,可以提高第一俯仰驱动件和第二俯仰驱动件之间的连接稳定性,胯部组件的结构稳定,且可以独立地对第一连接件或第二连接件进行拆装维修,无需更换整个连接结构,便于操作。
15、一种实施方式中,所述第一俯仰驱动件包括相连的筒状外壳和底板,所述底板收容于所述筒状外壳内,且所述筒状外壳凸出于所述底板朝向所述连接结构的一面,至少部分所述第一连接件和/或至少部分所述第二连接件收容于所述底板朝向所述连接结构的表面和所述筒状外壳围合的空间。通过设置至少部分第一连接件和/或至少部分第二连接件收容于筒状外壳和底板之间,可以节省空间,提高空间利用率。
16、第三方面,本技术还提供一种人形机器人,包括两个腿部组件和如第二方面各种实施方式中所述的胯部组件,所述胯部组件的第一髋关节机构和第二髋关节机构各与其中一个所述腿部组件连接。通过设置独特的胯部组件,胯部组件的结构设置合理,可以提高人形机器人的结构稳定性。
本文地址:https://www.jishuxx.com/zhuanli/20240905/287514.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
上一篇
橡胶管切割设备的制作方法
下一篇
返回列表