一种齿轮驱动仿鱼机器人
- 国知局
- 2024-09-05 14:55:05
本发明属于仿生机器人,具体涉及一种齿轮驱动仿鱼机器人。
背景技术:
1、随着社会的发展,人类对于海洋的探索也逐步深入,水下作业不断增加,水下机器人应运而生。目前,多数的水下机器人以螺旋桨作为水下推进装置。但是,这种装置不仅会产生侧向的涡流,降低推进效率,其噪声较大,对水下生态环境有一定破坏性。因此,对仿生水下机器人研究成为热点,仿生水下机器人成为具有运动灵活性高、环境适应性强、可小型化轻量化、噪音低等特点,在海洋生物考察、海底勘探、救灾救援、公共安全、社会服务、国防军工等领域具有广泛的应用前景。
2、目前仿生水下机器人根据仿生动物的运动方式可分为射流推进和摆动型两种。摆动型是使用鳍或躯干做往复摆动或波动产生推动力。躯干往复摆动大多使用多个舵机、记忆合金、绳索和气压驱动的设计,其在复杂水中环境可以灵活运动,但推进效率较差,且能耗较高,难以实现在特殊情况下的紧急加速,操控较复杂。
3、公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现思路
1、本发明的目的在于提供一种齿轮驱动仿鱼机器人,其能够解决上述背景技术中提出的问题。
2、为了实现上述目的,本发明一具体实施例提供的技术方案如下:
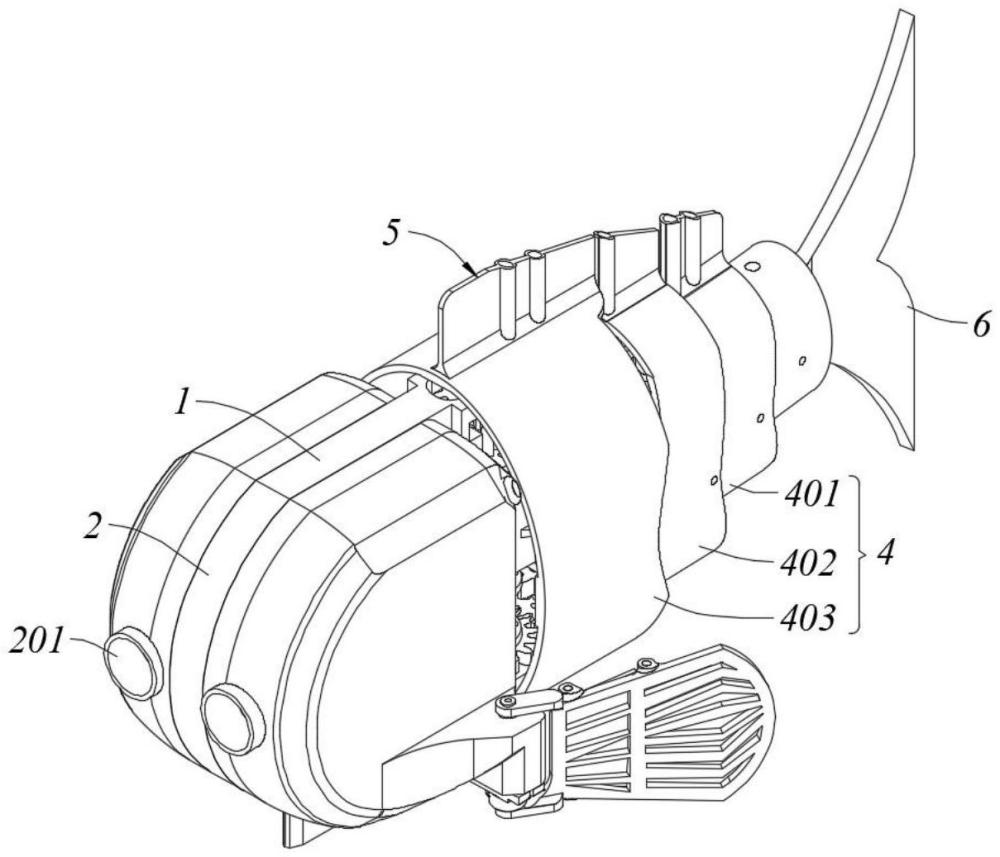
3、一种齿轮驱动仿鱼机器人,包括仿鱼头部组件和仿鱼躯干组件,所述仿鱼头部组件包括仿鱼头骨、仿鱼头盖、重心调节装置,所述仿鱼头盖安装在仿鱼头骨上,所述仿鱼头骨和仿鱼头盖配合形成空腔,所述重心调节装置安装在空腔内,用于调节仿鱼机器人的重心,所述仿鱼躯干组件包括传动组件、仿鱼尾鳍组件、仿鱼骨架,所述传动组件安装在仿鱼头骨远离仿鱼头盖的一端,所述仿鱼尾鳍组件安装在传动组件远离仿鱼头骨的一端,所述传动组件安装在仿鱼骨架的内部,所述齿轮驱动仿鱼机器人还包括仿鱼胸鳍,所述仿鱼胸鳍安装在齿轮驱动仿鱼机器人的两侧,所述仿鱼胸鳍向后摆动给齿轮驱动仿鱼机器人提供推力完成齿轮驱动仿鱼机器人的游动。
4、在本发明的一个或多个实施例中,所述空腔靠近传动组件的侧壁上固定连接有固定架,所述重心调节装置包括第二电机,所述第二电机安装在固定架上,所述第二电机的输出轴固定连接有丝杆,所述丝杆的两侧固定连接有导向杆,所述丝杆上螺纹连接有重心块,所述丝杆远离第二电机的一端固定连接有定位板,所述定位板的一端固定连接在空腔的侧壁上。
5、在本发明的一个或多个实施例中,所述仿鱼头骨远离仿鱼头盖的一端固定连接有第一安装架和第二安装架,所述传动组件包括若干个传动单元、第一舵机和第二连接杆,其中一个所述第一舵机安装在第二安装架上,所述第二连接杆安装在第一舵机和安装在第二安装架上的第一舵机之间,相邻所述第一舵机实现动能传递。
6、在本发明的一个或多个实施例中,所述传动单元包括第一连接板,所述第一连接板上开设有两个安装孔,所述第一连接板上固定连接有与安装孔相匹配的第一齿轮和第二齿轮,所述第一齿轮和第二齿轮的上端均转动连接有中心管,所述中心管固定连接在安装孔内,所述第一齿轮和第二齿轮相互啮合,相邻所述传动单元之间安装有第一连接杆,所述第一连接杆的一端与一个传动单元上的第二齿轮固定连接,另一端固定与另一个传动单元上的第一齿轮固定连接,所述第一连接杆的外径小于中心管的内径。
7、在本发明的一个或多个实施例中,所述仿鱼骨架的上端安装若干个仿鱼背鳍组件,所述仿鱼背鳍组件包括背鳍主体,背鳍主体的下端固定连接有与仿鱼骨架相匹配的连接轴,所述仿鱼骨架的内部安装有与连接轴相匹配的第一电机,所述空腔内安装有与第一电机相匹配的电池二。
8、在本发明的一个或多个实施例中,所述仿鱼机器人包括用于给仿鱼机器人供电的电池一,所述电池一安装在空腔内,所述电池二能够存储电能,并将多余的电能输送给电池一。
9、在本发明的一个或多个实施例中,所述仿鱼头盖的侧壁上固定连接有第三安装架,所述仿鱼胸鳍包括第二舵机和仿鱼胸鳍板,所述第二舵机安装在第三安装架上,所述第二舵机和仿鱼胸鳍板为转动连接,所述第二舵机用于驱动仿鱼胸鳍板转动,所述仿鱼胸鳍板包括第二连接板,所述第二连接板上开设有用于水流通过的通孔,所述第二连接板上转动连接有挡水板,所述挡水板用于向后摆动时阻挡水流。
10、在本发明的一个或多个实施例中,所述仿鱼头盖开设有第一腔体,所述第一腔体内用于填充液体,所述仿鱼头盖上安装有与第一腔体相匹配的输液组件,所述输液组件用于改变第一腔体内液体的含量,所述输液组件包括多个喷嘴和微型泵,所述喷嘴安装在第一腔体的外壁,所述喷嘴和微型泵之间安装有连接管,所述微型泵位于第一腔体的内部,所述微型泵上固定连接有进液口。
11、在本发明的一个或多个实施例中,所述仿鱼机器人的下端转动连接有稳向板。
12、在本发明的一个或多个实施例中,所述传动单元和仿鱼尾鳍组件之间安装有第一连接板,所述第一连接板的一端与传动单元为固定连接,另一端与仿鱼尾鳍组件为转动连接。
13、与现有技术相比,本发明的一种齿轮驱动仿鱼机器人具有以下优点:
14、1)、通过设置传动组件模拟鱼在水下游动的姿态,更加贴合鱼类,起到更好的仿生效果;
15、2)、设置多种推进方式,便于仿鱼机器人在水下应对不同的环境,且仿鱼机器人能够在水层中停留,停留时可以不消耗能源,且噪音低,具有较高的隐蔽性能;
16、3)、逆流而上时,可以利用逆流产生的动力前进,减少仿鱼机器人本身能源的损耗,且在逆流而下时能够进行发电,大幅提升仿鱼机器人的续航能力;
17、4)、仿鱼躯干组件设计为一种新型的齿轮摆动机构,只需单一舵机便可以很好地模仿生物鱼的摆动形态,相对多舵机控制方式,本发明更具仿生性、更节约能耗、较低操控难度;
18、5)、能够在水下急加速。
技术特征:1.一种齿轮驱动仿鱼机器人,包括仿鱼头部组件和仿鱼躯干组件,其特征在于:
2.根据权利要求1所述的一种齿轮驱动仿鱼机器人,其特征在于,所述空腔靠近传动组件的侧壁上固定连接有固定架;
3.根据权利要求1所述的一种齿轮驱动仿鱼机器人,其特征在于,所述仿鱼头骨远离仿鱼头盖的一端固定连接有第一安装架和第二安装架;
4.根据权利要求3所述的一种齿轮驱动仿鱼机器人,其特征在于,所述传动单元包括第一连接板,所述第一连接板上开设有两个安装孔,所述第一连接板上固定连接有与安装孔相匹配的第一齿轮和第二齿轮,所述第一齿轮和第二齿轮的上端均转动连接有中心管,所述中心管固定连接在安装孔内,所述第一齿轮和第二齿轮相互啮合;
5.根据权利要求1所述的一种齿轮驱动仿鱼机器人,其特征在于,所述仿鱼骨架的上端安装若干个仿鱼背鳍组件;
6.根据权利要求5所述的一种齿轮驱动仿鱼机器人,其特征在于,所述仿鱼机器人包括用于给仿鱼机器人供电的电池一,所述电池一安装在空腔内,所述电池二能够存储电能,并将多余的电能输送给电池一。
7.根据权利要求1所述的一种齿轮驱动仿鱼机器人,其特征在于,所述仿鱼头盖的侧壁上固定连接有第三安装架;
8.根据权利要求1所述的一种齿轮驱动仿鱼机器人,其特征在于,所述仿鱼头盖开设有第一腔体,所述第一腔体内用于填充液体,所述仿鱼头盖上安装有与第一腔体相匹配的输液组件,所述输液组件用于改变第一腔体内液体的含量;
9.根据权利要求1所述的一种齿轮驱动仿鱼机器人,其特征在于,所述仿鱼机器人的下端转动连接有稳向板。
10.根据权利要求1或9所述的一种齿轮驱动仿鱼机器人,其特征在于,所述传动单元和仿鱼尾鳍组件之间安装有第一连接板,所述第一连接板的一端与传动单元为固定连接,另一端与仿鱼尾鳍组件为转动连接。
技术总结本发明公开了一种齿轮驱动仿鱼机器人,包括仿鱼头部组件和仿鱼躯干组件,仿鱼头部组件包括仿鱼头骨、仿鱼头盖、重心调节装置,仿鱼头盖安装在仿鱼头骨上,仿鱼头骨和仿鱼头盖配合形成空腔,重心调节装置安装在空腔内,用于调节仿鱼机器人的重心,仿鱼躯干组件包括传动组件、仿鱼尾鳍组件、仿鱼骨架,传动组件安装在仿鱼头骨远离仿鱼头盖的一端,仿鱼尾鳍组件安装在传动组件远离仿鱼头骨的一端,传动组件安装在仿鱼骨架的内部,齿轮驱动仿鱼机器人还包括仿鱼胸鳍,仿鱼胸鳍安装在齿轮驱动仿鱼机器人的两侧。与现有技术相比,本发明的一种齿轮驱动仿鱼机器人通过设置传动组件模拟鱼在水下游动的姿态,更加贴合鱼类,起到更好的仿生效果。技术研发人员:张宝,张杰受保护的技术使用者:新余学院技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/288851.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表