基于两栖无人机的边界无中继跨海空介质蓝绿激光路由方法
- 国知局
- 2024-09-05 15:00:30
本发明涉及无人机通信和蓝绿激光通信,特别是涉及基于两栖无人机的边界无中继跨海空介质蓝绿激光路由方法。
背景技术:
1、在现代通信和监控系统中,跨海空操作对于军事和民用应用都极为关键。这些操作经常依赖于无人机技术,特别是在涉及到跨介质(海洋与空气)通信时。由于传统的无线电波在海水中的传播效果较差,基于无线电的通信技术在水下环境中面临重大挑战。因此,开发一种能够有效管理空中和水下无人机之间的数据传输的技术变得尤为重要。
2、蓝绿激光通信系统由于其在光学窗口中的优良传输特性,被认为是解决这一问题的理想选择。这种激光系统能在较浅的水层中有效传输,比传统无线电波提供更可靠的数据链路。
3、然而,尽管蓝绿激光通信在理论上是可行的,但其实际应用受到了多种因素的限制,如激光的对准精度、水质清晰度、以及光在水中的散射和吸收。此外,当前的激光路由算法大多数设计用于单一介质(即全空中或全水下),缺乏有效处理跨介质环境中特有问题的能力,如动态变化的环境因素对激光传播的影响。这些限制减少了两栖无人机系统在执行跨海空任务时的效率和可靠性。
技术实现思路
1、有鉴于此,本发明提供了基于两栖无人机的边界无中继跨海空介质蓝绿激光路由方法,能够在不依赖中继支持的情况下,实现两栖无人机之间的有效通信,解决了当前的激光路由算法大多数设计用于单一介质(即全空中或全水下),缺乏有效处理跨介质环境中特有问题的能力的技术问题。
2、为此,本发明提供了以下技术方案:
3、本发明公开了一种基于两栖无人机的边界无中继跨海空介质蓝绿激光路由方法,包括以下步骤:
4、对跨海空介质环境进行建模;
5、建立无人机蓝绿激光通信的信道模型;
6、确定影响因素以及每个因素的权值,自适应调节每个因素的权值,所述影响因素包括:下一跳节点的剩余能量、所处立方体的剩余总能量、当前的深度和到达下一跳节点对蓝绿激光的衰减大小;
7、在建模后的跨海空介质环境中,确定候选中继节点,基于所述因素以及每个因素的权值计算每一个候选中继节点的期望因子,选择期望因子最大的节点作为下一跳节点。
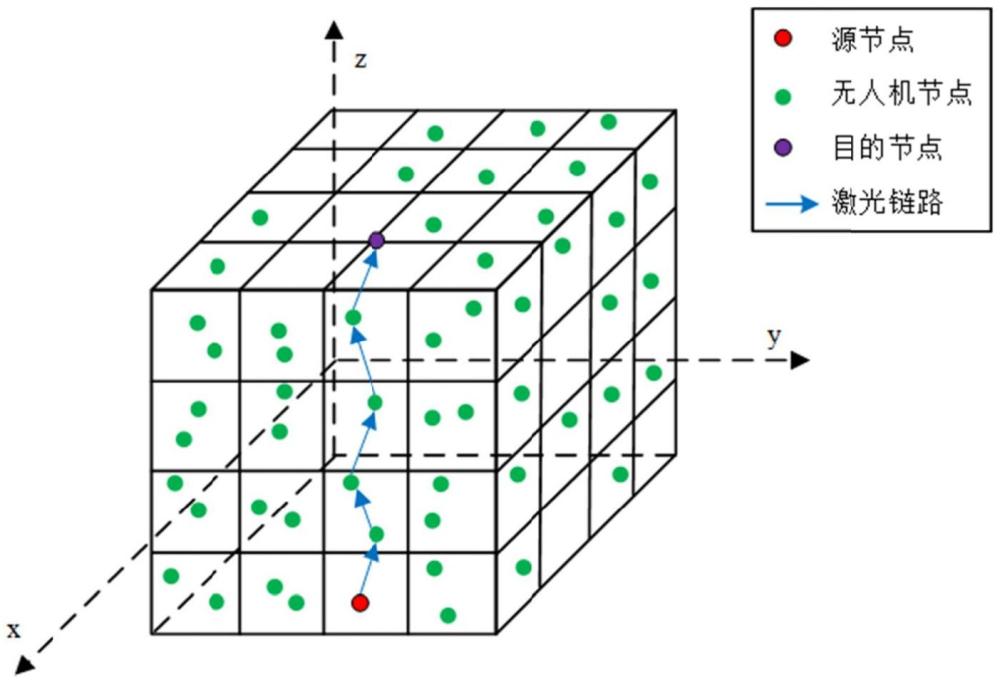
8、进一步地,对跨海空介质环境进行建模,包括:根据无人机的通信半径,将整个海空环境划分为若干个相同大小的立方体环境;
9、将无人机置于立方体的中心位置,以无人机的通信范围为半径形成一个球,将立方体放置在球的内部,并且使立方体与球相切。
10、进一步地,自适应调节每个因素的权值,包括:
11、利用适应度函数自适应调节每个因素的权值,所述适应度函数为:
12、
13、δ=0.6-α;
14、其中,p代表当前网络剩余能量的百分比,通过当前网络剩余的总能量比上网络中初始的总能量得到;在网络的初期,将α设置为0.1,β和γ设置为0.2,无人所处立方体的剩余总能量和高度的权重系数相同且不变,δ设置为0.5;在p大于等于80%时,α的值默认为初始值,当p小于80%时,α的值随着r的减小而变大,当p小于等于20%时,α的值为0.5;当α的值发生变化时,δ的值也会随之变化。
15、进一步地,当前网络剩余的总能量的计算方式包括:
16、er=es-ec;
17、其中,er代表当前网络中剩余的总能量,ec代表当前网络中每架无人机消耗的能量的总和;es代表初始时网络中所有无人机的能量和,n是网络中无人机的数量。
18、进一步地,确定候选中继节点,包括:
19、假设当前的发送节点为b,首先找到它的一跳邻居节点,然后从邻居节点中找到深度小于b节点的合格候选中继节点,分别获取它们的唯一id号,组成一组符合条件的候选中继节点集合q:q=[idi,idj,…,idk]i,j,k∈(0,n];
20、式中,idi为节点i的唯一编号,节点i、j、k为节点b符合条件的候选中继节点,n为网络内总节点数。
21、进一步地,计算每一个候选中继节点的期望因子,包括:
22、在得到符合条件的候选中继节点集合q之后,分别获取集合中节点自身的剩余能量,组成符合条件的候选中继节点的剩余能量集合e:
23、e=[ei,ej,…,ek]i,j,k∈(0,n];
24、式中,ei是节点i的剩余能量,n为网络内总结点数;
25、同时,从符合条件的候选中继节点集合q中,分别获取每个节点所在立方体的唯一编号,组成候选中继节点的所属立方体的剩余能量集合g:
26、g=[gi,gj,…,gk]i,j,k∈(0,m];
27、式中,gi为节点i所属立方体的剩余能量,立方体的剩余能量为立方体中所有节点的剩余能量之和,m为立方体的个数;
28、如果在符合条件的候选中继节点的剩余能量集合e中或者候选中继节点所属立方体的剩余能量集合g中,有任何一个值为0的元素,在集合q、e、g中删除对应位置的元素;
29、根据符合条件的候选中继节点集合q,分别获取集合中节点自身的深度信息,组成符合条件的候选中继节点的深度信息集合d:
30、d=[di,dj,…,dk]i,j,k∈(0,n];
31、式中,di表示节点i的深度信息,n表示网络内总结点的个数;
32、集合d中是相比当前发送节点深度更小的节点集合,根据符合条件的候选中继节点集合q,利用欧氏距离计算节点之间的距离:
33、
34、式中a代表候选中继节点中的节点,计算集合中节点与当前节点的距离,之后根据衰减公式计算,最后分别得到到达每一个节点的光强,组成符合条件的候选中继节点的光强信息集合l:
35、l=[li,lj,…,lk]i,j,k∈(0,n];
36、计算符合条件的候选中继节点的期望因子w(i):
37、w(i)=α×ei+β×gi+γ×di-δ×li;
38、式中,w(i)为节点i的期望因子,ei代表节点的剩余能量,gi代表节点i所属立方体网络的剩余能量,di表示节点i的深度信息,li表示到达节点i时的剩余光强;α、β、γ、δ是每一项的系数,其中α+β+γ+δ=1。
39、本发明的优点和积极效果:本发明提供了基于两栖无人机的边界无中继跨海空介质蓝绿激光路由方法,该方法摒弃了传统利用浮标等方法,选择海面无中继的方式进行信息的传输,确保数据传输的连续性和安全性。
技术特征:1.一种基于两栖无人机的边界无中继跨海空介质蓝绿激光路由方法,其特征在于,对海空环境进行建模并根据不同影响因素进行跨海空介质候选中继节点的选择,包括以下步骤:
2.根据权利要求1所述的一种基于两栖无人机的边界无中继跨海空介质蓝绿激光路由方法,其特征在于,对跨海空介质环境进行建模,包括:根据无人机的通信半径,将整个海空环境划分为若干个相同大小的立方体环境;
3.根据权利要求1所述的一种基于两栖无人机的边界无中继跨海空介质蓝绿激光路由方法,其特征在于,建立无人机蓝绿激光通信的信道模型,包括:
4.根据权利要求1所述的一种基于两栖无人机的边界无中继跨海空介质蓝绿激光路由方法,其特征在于,自适应调节每个因素的权值,包括:
5.根据权利要求1所述的一种基于两栖无人机的边界无中继跨海空介质蓝绿激光路由方法,其特征在于,针对当前网络剩余的总能量进行计算,包括:
6.根据权利要求1所述的一种基于两栖无人机的边界无中继跨海空介质蓝绿激光路由方法,其特征在于,确定候选中继节点,包括:
7.根据权利要求6所述的一种基于两栖无人机的边界无中继跨海空介质蓝绿激光路由方法,其特征在于,计算每一个候选中继节点的期望因子,包括:
技术总结本发明提供了一种基于两栖无人机的边界无中继跨海空介质蓝绿激光路由方法,涉及无人机通信和蓝绿激光通信技术领域,包括:对跨海空介质环境进行建模;建立无人机蓝绿激光通信的信道模型;在建模后的跨海空介质环境中,确定候选中继节点;确定影响因素以及每个因素的权值,自适应调节每个因素的权值,基于所述因素以及每个因素的权值计算每一个候选中继节点的期望因子,选择期望因子最大的节点作为下一跳节点;所述影响因素包括:下一跳节点的剩余能量、所处立方体的剩余总能量、当前的深度和到达下一跳节点对蓝绿激光的衰减大小。本发明中的方法能够适应不同的环境条件,确保数据传输的连续性和安全性。技术研发人员:吴杰宏,杨旭,张雯那,贾忠利,于存谦受保护的技术使用者:沈阳航空航天大学技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/289013.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表