基于偏心机理的连续体机器人宏微运动装置及方法与流程
- 国知局
- 2024-09-05 15:00:21
本发明涉及机器人,具体地,涉及一种基于偏心机理的连续体机器人宏微运动装置及方法。
背景技术:
1、连续体机器人因其灵巧性和灵活性而在微创手术中引起了越来越多的关注,它的柔顺骨架可以自然地顺应环境障碍,使机器人能够通过曲折的路径到达人体腔道的深处。
2、现有公告号为cn113023659b的中国专利申请文献,其公开了一种xy宏微运动平台及其末端反馈方法,xy宏微运动平台包括:微调组件、宏驱动组件和位置检测装置;宏驱动组件包括:x向宏驱动单元、y向宏驱动单元、x向平板和y向平板;位置检测装置用于获取自身在x轴和y轴的所在位置。本xy宏微运动平台,采用xy宏微解耦方式,每个轴向上的宏运动部件与微运动部件间设置解耦布置,并在此基础上在x向运动与y向运动之间进行解耦布置,以使整个系统在xy轴向形成共水平面,以及和宏微之间形成解耦设置。
3、现有技术采用xy宏微解耦方式,每个轴向上的宏运动部件与微运动部件间设置解耦布置,该发明的解耦方式需要多个运动副,整体结构尺寸大,无法适用于连续体机器人的宏微运动。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种基于偏心机理的连续体机器人宏微运动装置及方法。
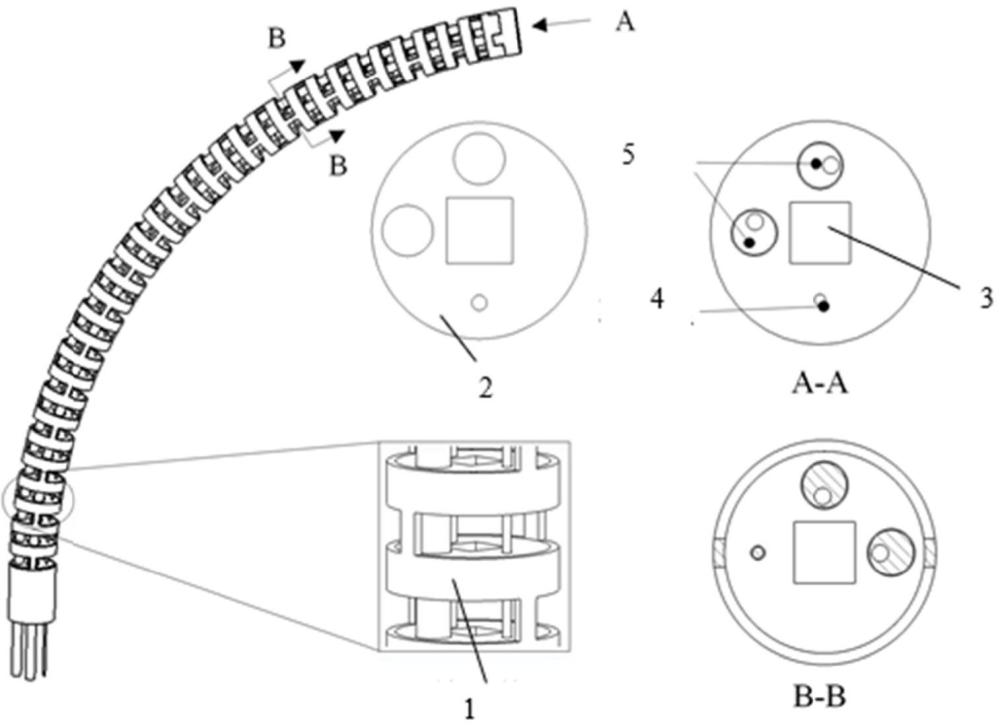
2、根据本发明提供的一种基于偏心机理的连续体机器人宏微运动装置,包括多个依次连接的单元体,任一所述单元体均包括刚性段和可弯曲段;所述单元体的刚性段安装有定位块,所述定位块的中部形成有中心腔道,所述定位块上还设置有偏心的宏驱动腔道和偏心的微驱动腔道;所述宏驱动腔道内设置有驱动绳,所述微驱动腔道内设置有具有偏心腔的可弯曲纤维。
3、优选地,所述微驱动腔道设置有两个,两个所述微驱动腔道在定位块上分别和中心腔道的中心连线形成的夹角角度包括九十度。
4、优选地,所述单元体为具有对称的切槽结构的镍钛管,所述单元体包括两个刚性段和两个可弯曲段,两个所述可弯曲段均设置在两个刚性段之间,且两个所述可弯曲段呈相对设置。
5、优选地,所述刚性段和可弯曲段是交替连接的,一个所述刚性段有两个相邻的可弯曲段,其中一个所述弯曲段可以在垂直方向上弯曲,另一个所述弯曲段可以在水平方向上弯曲。
6、优选地,所述定位块呈圆形片状,所述定位块同轴安装在单元体的刚性段内。
7、优选地,所述有具有偏心腔的可弯曲纤维的直径为亚毫米级。
8、根据本发明提供的一种基于偏心机理的连续体机器人宏微运动方法,运动方法满足如下运动学模型:
9、对于某一单元体,根据材料几何变形条件,可以得到该单元体截面处的平衡方程为:
10、
11、其中,ei是横截面第i个区域的杨氏模量,li是微元dai到横截面中性轴的距离,ai是横截面第i个区域的面积;
12、如果机器人在水平方向上弯曲,则可以表示为:
13、ema1(y1-y)+era21(y21-y)-era22(y22-y)+era31(y31-y)-era32(y32-y)=0
14、其中,em和er分别是机器人主体和聚合物纤维杆的杨氏模量;a1、a21、a22、a31和a32分别是s1、s2-1、s2-2、s3-1和s3-2的面积;y1、y21、y22、y31和y32分别为s1、s2-1、s2-2、s3-1和s3-2的中性轴位置;y是横截面的中性轴,可以得出:
15、
16、当机器人在垂直方向弯曲时,横截面的中性轴可以计算为:
17、
18、其中a4是s4的面积;z21、z22、z31、z32和z4分别为s2-1,s2-2,s3-1,s3-2和s4的中性轴位置;z是横截面的中性轴;
19、其中,y22、y32、z22和z32将随着纤维的旋转而变化,如下式所示:
20、
21、其中de是纤维偏心内腔中心到纤维中心的距离,d是纤维中心与机器人中心之间的距离,q1和q2是两根纤维的旋转角度,此外,两根纤维的正旋转方向为逆时针;
22、每个单元体的两个可弯曲部分沿水平和垂直方向的弯矩和曲率可以表示为:
23、m1=κyeiy=-(y+dc)t1
24、m2=-κzeiz=zt2
25、其中m1和m2分别为沿水平和垂直方向的弯矩,κy和κz分别为沿水平和垂直方向的中性轴曲率,eiy和eiz分别为沿水平和垂直方向的弯曲刚度,t1和t2分别为两个可弯曲部分中驱动绳的张力,dc为驱动绳与机器人中心轴之间的距离。
26、优选地,为了方便求解,设每个单元体所对应的驱动绳的长度变化量是相同的;在同一个单元体中,假设沿驱动绳长度方向的张力是相同的;忽略两根纤维旋转对连续体机器人弯曲刚度的影响;
27、由于同一个单元体中两个可弯曲部分的材料和尺寸相同,沿水平和垂直方向的弯曲刚度可认为是相等,即eiy=eiz;
28、
29、当驱动绳被拉动时,每个弯曲方向所弯曲的角度为:
30、
31、其中,h为每个可弯曲段的长度,θy和θz分别为水平和垂直方向的弯曲角度,dq31和dq32分别为由于水平弯曲和垂直弯曲导致的每个单元体中驱动绳长度的变化量,q3/n=dq31+dq32,q3为驱动绳总长度变化量,n为单元体总个数;
32、当q3已知时,θy,θz,κy和κz可以计算得到。
33、优选地,每个单元体的正运动学可描述为:
34、
35、
36、
37、其中,p1=[sin(θy),-(1-cos(θy)),0]t/κy,p2=[h,0,0]t,
38、p3=[sin(θz),0,-(1-cos(θz))]t/κz,and p4=[h,0,0]t。
39、优选地,机器人的正运动学可以表示为:
40、
41、
42、其中,是机器人基座到第一个单元体的其次变换矩阵,是机器人最后一个单元体到机器人末端的其次变换矩阵,和分别是和平移向量。
43、与现有技术相比,本发明具有如下的有益效果:
44、1、本发明通过旋转具有偏心腔的可弯曲纤维来增强机器人的运动能力,将两根带有偏心内腔的热拉聚合物纤维插入连续机器人的微驱动腔道中,机器人的宏运动由驱动绳的拉伸完成,微运动由偏心排列的纤维的旋转提供,微运动的基本原理是依赖于连续体机器人中性轴的微小变化。
技术特征:1.一种基于偏心机理的连续体机器人宏微运动装置,其特征在于,包括多个依次连接的单元体(1),任一所述单元体(1)均包括刚性段和可弯曲段;
2.如权利要求1所述的基于偏心机理的连续体机器人宏微运动装置,其特征在于,所述微驱动腔道(5)设置有两个,两个所述微驱动腔道(5)在定位块(2)上分别和中心腔道(3)的中心连线形成的夹角角度包括九十度。
3.如权利要求1所述的基于偏心机理的连续体机器人宏微运动装置,其特征在于,所述单元体(1)为具有对称的切槽结构的镍钛管,所述单元体(1)包括两个刚性段和两个可弯曲段,两个所述可弯曲段均设置在两个刚性段之间,且两个所述可弯曲段呈相对设置。
4.如权利要求3所述的基于偏心机理的连续体机器人宏微运动装置,其特征在于,所述刚性段和可弯曲段是交替连接的,一个所述刚性段有两个相邻的可弯曲段,其中一个所述弯曲段可以在垂直方向上弯曲,另一个所述弯曲段可以在水平方向上弯曲。
5.如权利要求1所述的基于偏心机理的连续体机器人宏微运动装置,其特征在于,所述定位块(2)呈圆形片状,所述定位块(2)同轴安装在单元体(1)的刚性段内。
6.如权利要求1所述的基于偏心机理的连续体机器人宏微运动装置,其特征在于,所述有具有偏心腔的可弯曲纤维的直径为亚毫米级。
7.一种基于偏心机理的连续体机器人宏微运动方法,其特征在于,采用权利要求1-6任一项所述的基于偏心机理的连续体机器人宏微运动装置,运动方法满足如下运动学模型:
8.如权利要求7所述的基于偏心机理的连续体机器人宏微运动方法,其特征在于,为了方便求解,设每个单元体(1)所对应的驱动绳的长度变化量是相同的;在同一个单元体(1)中,假设沿驱动绳长度方向的张力是相同的;忽略两根纤维旋转对连续体机器人弯曲刚度的影响;
9.如权利要求8所述的基于偏心机理的连续体机器人宏微运动方法,其特征在于,每个单元体(1)的正运动学可描述为:
10.如权利要求9所述的基于偏心机理的连续体机器人宏微运动方法,其特征在于,机器人的正运动学可以表示为:
技术总结本发明提供了一种基于偏心机理的连续体机器人宏微运动装置及方法,包括多个依次连接的单元体,任一所述单元体均包括刚性段和可弯曲段;所述单元体的刚性段安装有定位块,所述定位块的中部形成有中心腔道,所述定位块上还设置有偏心的宏驱动腔道和偏心的微驱动腔道;所述宏驱动腔道内设置有驱动绳,所述微驱动腔道内设置有具有偏心腔的可弯曲纤维。通过旋转具有偏心腔的可弯曲纤维来增强机器人的运动能力,将两根带有偏心内腔的热拉聚合物纤维插入连续机器人的微驱动腔道中,机器人的宏运动由驱动绳的拉伸完成,微运动由偏心排列的纤维的旋转提供,微运动的基本原理是依赖于连续体机器人中性轴的微小变化。技术研发人员:高安柱,林泽才,邹运,周成受保护的技术使用者:上海医疗机器人研究院有限公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/289012.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表