操作高压开关柜的机器人末端执行装置及机器人的制作方法
- 国知局
- 2024-09-05 15:02:55
本公开的实施例属于机器人,具体涉及一种操作高压开关柜的机器人末端执行装置及机器人。
背景技术:
1、高压开关柜一般在高压电流工况下工作,当需要对高压开关柜进行分合地刀操作或者手摇车进摇出摇操作时,需要人工进行操作。由于高压开关柜手车摇进、摇出操作和接地刀闸倒闸操作流程复杂,人工操作时,稍有失误就会引发严重事故,轻则财产损失,重则人员伤亡。
2、公开内容
3、本公开的实施例旨在至少解决现有技术中存在的技术问题之一,提供一种操作高压开关柜的机器人末端执行装置。
4、本公开的实施例提供一种操作高压开关柜的机器人末端执行装置,所述操作高压开关柜的机器人末端执行装置包括:
5、旋转移动机构;
6、快换组件,所述旋转移动机构驱动连接于所述快换组件,所述旋转移动机构用于驱动所述快换组件移动和转动;
7、操作头,所述快换组件与所述操作头可拆卸连接;
8、按钮按压机构,所述按钮按压机构与所述旋转移动机构连接,所述按钮按压机构用于按压高压开关柜的按钮;
9、拨动机构,所述拨动机构与所述旋转移动机构连接,所述拨动机构用于移动高压开关柜的拨钮。
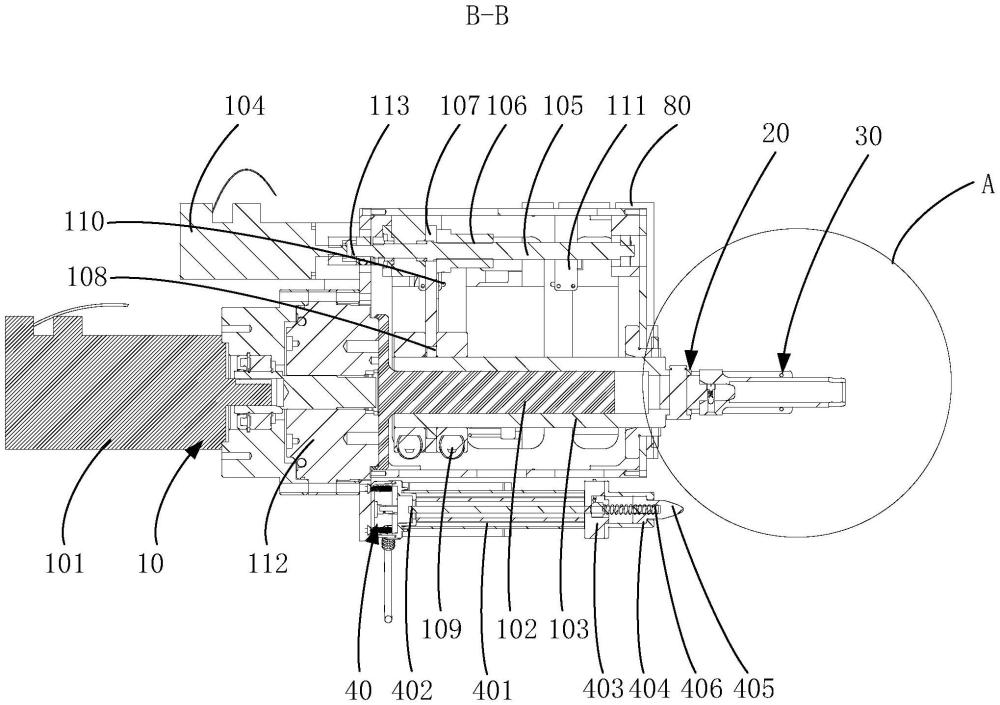
10、在本公开的一些实施例中,所述旋转移动机构包括:
11、第一电机;
12、电机连接轴,所述第一电机驱动连接于所述电机连接轴;
13、伸缩轴套,所述伸缩轴套套设于所述电机连接轴,所述第一电机通过所述电机连接轴驱动所述伸缩轴套转动;
14、第二电机;
15、进给丝杠,所述第二电机驱动连接于所述进给丝杠;
16、丝杠螺母,所述丝杠螺母套设于所述进给丝杠;
17、连接组件,所述丝杠螺母通过所述连接组件与所述伸缩轴套连接,以驱动所述伸缩轴套移动。
18、在本公开的一些实施例中,所述连接组件包括:
19、轴套连接片,所述轴套连接片套设于所述丝杠螺母;
20、轴承,所述轴承外接于所述轴套连接片,所述轴承内接于所述伸缩轴套;
21、两个止动卡环,每一所述止动卡环固定套设于所述伸缩轴套,沿所述伸缩轴套的轴向,所述轴套连接片与所述轴承位于两个所述止动卡环之间,每一所述止动卡环以相对所述轴套连接片可转动的方式与所述轴套连接片接触。
22、在本公开的一些实施例中,所述旋转移动机构还包括:
23、限位触片,所述限位触片设于所述轴套连接片上;
24、限位开关,沿所述伸缩轴套的伸出方向,所述限位开关位于所述轴套连接片的前方,所述限位开关与所述限位触片接触时,所述第二电机停止转动或者反向转动。
25、在本公开的一些实施例中,所述快换组件包括:
26、快换头,所述快换头与所述旋转移动机构的输出端可拆卸连接,所述快换头形成有安装孔;
27、顶压螺丝,所述顶压螺丝可拆卸连接于所述安装孔的第一端;
28、弹簧,所述弹簧的第一端与所述顶压螺丝连接,所述弹簧位于所述安装孔内;
29、伸缩头,所述弹簧的第二端与所述伸缩头连接,所述伸缩头位于所述安装孔的第二端,至少部分所述伸缩头能够伸出所述安装孔,或者位于所述安装孔内。
30、在本公开的一些实施例中,所述快换头包括:
31、连接部,所述连接部通过销轴与所述旋转移动机构的输出端连接;
32、快换部,所述快换部与所述连接部连接,所述快换部的轴线与所述旋转移动机构的输出端的轴线重合,所述安装孔设于所述快换头。
33、在本公开的一些实施例中,所述操作头包括:
34、连接件,所述连接件与所述快换组件可拆卸连接;
35、操作杆,所述操作杆的第一端所述连接件连接,所述操作杆的第二端设有第一操作部和第二操作部,沿所述操作杆的长度方向,所述第一操作部的长度大于所述第二操作部的长度。
36、在本公开的一些实施例中,所述操作杆的第二端形成有卡槽,所述卡槽隔离所述第一操作部与所述第二操作部,所述卡槽沿所述操作杆的长度方向布置。
37、在本公开的一些实施例中,所述按钮按压机构包括:
38、按压壳体,所述按压壳体与所述旋转移动机构连接,所述按压壳体内形成有按压腔体;
39、伸缩推杆,所述伸缩推杆以可伸缩的方式设于所述按压壳体;
40、按压座,所述伸缩推杆的一端与所述按压座连接;
41、顶针导座,所述顶针导座与所述按压座连接,且所述顶针导座与所述按压座之间形成按压空间;
42、顶针,所述顶针滑动连接于所述顶针导座,至少部分所述顶针位于所述按压空间,部分所述顶针能够伸出所述顶针导座;
43、顶针弹簧,所述顶针弹簧的第一端抵接于所述按压座,所述顶针弹簧的第二端抵接于所述顶针。
44、在本公开的一些实施例中,所述操作高压开关柜机器人的末端执行装置还包括安装框体,所述安装框架形成有安装空间,部分所述旋转移动机构设于所述安装框体的所述安装空间内,所述旋转移动机构的输出端、所述快换组件、所述操作头和所述拨动机构的操作部分均位于所述安装框架的同一侧,所述按钮按压机构设于所述安装框架的下方。
45、本公开第二方面提出了一种操作高压开关柜的机器人,所述操作高压开关柜的机器人包括根据上述任一实施例所述的操作高压开关柜的机器人末端执行装置。
46、本公开的实施例的操作高压开关柜的机器人末端执行装置及机器人,通过拨动机构将高压开关柜上的拨把拨动至目标位置,以为旋转移动机构和操作头的动作提供活动空间,通过按钮按压机构可以将高压开关柜的按钮按至目标位置,以解锁高压开关柜被旋转移动部分,通过旋转移动机构可以驱动快换组件转动和移动,快换组件带动与其连接的操作头一同转动和移动,从而实现对高压开关柜进行相应的操作。通过拨动机构、按钮按压机构和旋转移动机构可以实现高压开关柜的自动化操作,提高高压开关柜操作的规范性和工作效率,避免人工操作造成的人身安全的问题,提高操作的安全性。
技术实现思路
技术特征:1.一种操作高压开关柜的机器人末端执行装置,其特征在于,所述操作高压开关柜的机器人末端执行装置包括:
2.根据权利要求1所述的操作高压开关柜的机器人末端执行装置,其特征在于,所述旋转移动机构包括:
3.根据权利要求2所述的操作高压开关柜的机器人末端执行装置,其特征在于,所述连接组件包括:
4.根据权利要求3所述的操作高压开关柜的机器人末端执行装置,其特征在于,所述旋转移动机构还包括:
5.根据权利要求1所述的操作高压开关柜的机器人末端执行装置,其特征在于,所述快换组件包括:
6.根据权利要求5所述的操作高压开关柜的机器人末端执行装置,其特征在于,所述快换头包括:
7.根据权利要求1所述的操作高压开关柜的机器人末端执行装置,其特征在于,所述操作头包括:
8.根据权利要求7所述的操作高压开关柜的机器人末端执行装置,其特征在于,所述操作杆的第二端形成有卡槽,所述卡槽隔离所述第一操作部与所述第二操作部,所述卡槽沿所述操作杆的长度方向布置。
9.根据权利要求1所述的操作高压开关柜的机器人末端执行装置,其特征在于,所述按钮按压机构包括:
10.一种操作高压开关柜的机器人,其特征在于,所述操作高压开关柜的机器人包括根据权利要求1至9中任一项所述的操作高压开关柜的机器人末端执行装置。
技术总结本公开的实施例提供一种操作高压开关柜的机器人末端执行装置及机器人,末端执行装置包括:旋转移动机构;快换组件,旋转移动机构驱动连接于快换组件,旋转移动机构用于驱动快换组件移动和转动;操作头,快换组件与操作头可拆卸连接;按钮按压机构,按钮按压机构与旋转移动机构连接,按钮按压机构用于按压高压开关柜的按钮;拨动机构,拨动机构与旋转移动机构连接,拨动机构用于移动高压开关柜的拨钮。通过拨动机构、按钮按压机构和旋转移动机构可以实现高压开关柜的自动化操作,提高高压开关柜操作的规范性和工作效率,避免人工操作造成的人身安全的问题,提高操作的安全性。技术研发人员:李洪,冯庭有,曾向荣,黄维,成仕强,林业桂,林海,吴增松,赵霞受保护的技术使用者:华能汕头海门发电有限责任公司技术研发日:技术公布日:2024/9/2本文地址:https://www.jishuxx.com/zhuanli/20240905/289225.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表