一种智能施工升降机及施工升降机的安全监控管理系统的制作方法
- 国知局
- 2024-09-05 15:03:33
本发明涉及施工智能监控,尤其涉及一种智能施工升降机及施工升降机的安全监控管理系统。
背景技术:
1、施工升降机是一种用于建筑工地垂直运输人员和物料的重要设备,它通过齿轮齿条啮合方式或钢丝绳提升方式,使吊笼作垂直或倾斜运动。施工升降机的安全性至关重要,它直接关系到工作人员的生命安全和工程进度。
2、目前对于施工升降机中的安全监测,主要依赖于人工经验,例如管理者会提醒工作人员的乘梯行为,以降低人为导致的安全隐患;或不定时检查物料载重情况、对升降机设备进行故障排查或检修等,从而判断是否存在超重或设备本身故障问题。然而,这样的安全管理方式显然智能化程度低,对于设备的故障排查通常也只是当设备故障后才能进行,无法实时监测。并且这种传统的监管方式所考虑的风险隐患较为单一,无法客观准确地评估升降机的运行风险,因此无法保证升降机的运行安全。
技术实现思路
1、为了解决上述提出的至少一个技术问题,本发明提供一种智能施工升降机及施工升降机的安全监控管理系统。
2、第一方面,本发明提供了一种智能施工升降机的安全监控管理系统,所述系统包括:
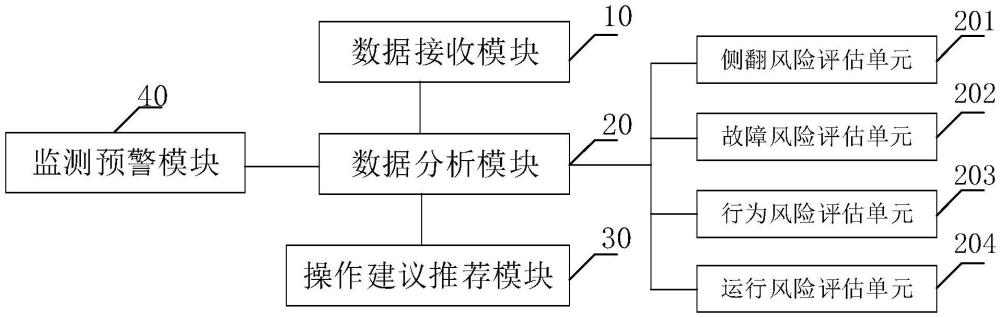
3、数据接收模块,用于接收施工升降机上传的运行数据,所述运行数据包括设备自身运行数据、吊笼内的图像数据以及吊笼外的环境数据,所述设备自身运行数据包括吊笼负载量、实际运行速度、吊笼倾斜角度以及设备损耗率;
4、数据分析模块,用于对所述运行数据进行分析,包括:
5、侧翻风险评估单元,用于根据环境数据、吊笼负载量计算目标运行速度,根据目标运行速度和实际运行速度的差值以及吊笼倾斜角度评估施工升降机的侧翻风险值;
6、故障风险评估单元,用于根据环境数据、吊笼负载量以及设备损耗率评估施工升降机的故障风险值;
7、行为风险评估单元,用于根据吊笼内的图像数据确定笼内工作人员的危险行为,并根据危险行为评估行为风险值;
8、运行风险评估单元,用于将侧翻风险值、故障风险值以及行为风险值代入风险评估模型,评估施工升降机的运行风险值;
9、操作建议推荐模块,用于获取数据分析模块的分析结果,并生成相应的操作建议发送至施工升降机;
10、监测预警模块,用于获取施工升降机的运行风险值,并判断施工升降机的运行风险值是否大于预设运行风险阈值;当所述运行风险值大于预设运行风险阈值时,触发报警提示。
11、优选地,所述操作建议推荐模块,包括:
12、速度更新指示单元,用于将侧翻风险值与预设侧翻风险阈值进行比较,若侧翻风险值大于预设侧翻风险阈值,将目标运行速度发送至施工升降机,以控制施工升降机根据目标运行速度更新实际运行速度;
13、故障排查指示单元,用于将故障风险值与预设故障风险阈值进行比较,若故障风险值大于预设故障风险阈值,生成故障排查指令发送至施工升降机,以控制施工升降机暂停运行并进入故障排查状态;
14、行为更正指示单元,用于将危险行为风险值与预设行为风险阈值进行比较,若危险行为风险值大于预设行为风险阈值,生成符合乘机规范行为的操作建议并发送至施工升降机,以控制笼内工作人员更正行为。
15、优选地,所述侧翻风险评估单元用于计算目标运行速度,包括:
16、vo=vi(1-σv)
17、σv=w1lgσh+w2e-σg
18、σh=σt+σh+σa
19、式中,vo表示升降机的目标运行速度,vi表示在负载量为g情况下的理论运行速度,σv表示速度影响因子,σt、σh、σa分别表示温度影响因子、湿度影响因子和风速影响因子,σh表示环境影响因子,σg表示载重影响因子,w1、w2分别表示权重。
20、优选地,所述侧翻风险评估单元用于评估施工升降机的侧翻风险值,包括:
21、δv=viσv
22、
23、
24、式中,δv表示升降机的目标运行速度与实际运行速度的差值,vo、vi分别表示升降机的目标运行速度和实际运行速度;r表示升降机的侧翻风险值,p1表示升降机的稳定性指数,g表示重力加速度,θ表示吊笼倾斜角度,fa、fm分别表示空气阻力和滑动摩擦阻力。
25、优选地,所述故障风险评估单元用于评估施工升降机的故障风险值,包括:
26、
27、式中,p2表示施工升降机的故障风险值,σh表示环境影响因子,σg表示载重影响因子,s表示设备损耗率,表示吊笼齿轮和齿条的啮合度,s0为预设的浮动啮合度,ci、di分别表示齿轮磨损程度和齿条磨损程度,lc0、lci分别表示齿轮的初始厚度和齿轮的当前厚度,ld0、ldi分别表示齿条的初始厚度和齿条的当前厚度。
28、优选地,所述行为风险评估单元用于评估行为风险值,包括:
29、识别工作人员的身份信息,将身份信息与佩戴安全帽颜色进行匹配,根据匹配结果确定安全帽错戴行为;
30、识别工作人员中安全帽漏戴行为以及危险操作行为,所述危险操作行为包括在吊笼内奔跑、跳跃、错误操作按键;
31、根据安全帽错戴行为、安全帽漏戴行为以及危险操作行为确定所述行为风险值。优选地,所述行为风险值的计算模型为:
32、p3=w3bn2+w4br+w5bb
33、式中,p3表示行为风险值,bn、br、bb分别表示安全帽漏戴、安全帽错戴以及危险操作行为所对应的风险值,w3、w4、w5分别表示权重,且满足w3>w4>w5。
34、优选地,所述运行风险评估单元用于将侧翻风险值、故障风险值以及行为风险值代入风险评估模型,评估施工升降机的运行风险值,包括:
35、
36、
37、式中,px表示风险指标,满足x=1,2,3时,px分别对应侧翻风险值、故障风险值以及行为风险值,ρx为风险指标的权重因子,j表示风险指标的提取参数,cx表示风险指标的关联系数;f表示升降机的运行风险值,α表示满足高斯函数的变量曲率。
38、第二方面,本发明还提供了一种智能施工升降机,应用于如上任一项所述的智能施工升降机的安全监控管理系统,包括:
39、控制系统与升降机本体;
40、所述控制系统用于与所述安全监控管理系统进行数据交互,包括将采集的施工升降机的运行数据发送至所述安全监控管理系统,响应所述安全监控管理系统推荐的操作建议以控制升降机本体运行;
41、所述升降机本体包括吊笼和安全控制系统;所述吊笼上设置有驱动结构和传动结构,所述驱动结构用于驱动吊笼运行,并通过传动结构与吊笼大梁进行滑动连接;所述安全控制系统包括紧急制动系统、限位器、安全门和防坠器。
42、与现有技术相比,本发明的有益效果在于:
43、本发明提供的智能施工升降机的安全监控管理系统,首先通过数据接收模块接收施工升降机上传的运行数据,所述运行数据包括设备自身运行数据、吊笼内的图像数据以及吊笼外的环境数据,所述设备自身运行数据包括吊笼负载量、实际运行速度、吊笼倾斜角度以及设备损耗率;然后采用数据分析模块中的各个子单元,分别计算出侧翻风险值、故障风险值以及行为风险值,最后根据这三个值综合计算施工升降机的运行风险值;从多个角度多个指标、细粒度地考虑升降机的运行风险影响因素,从而更加精确地得到了升降机的运行风险值,为后续的操作推荐生成及人工干预提供了有效的数据基础。另外,本系统还提供了操作建议推荐模块,用于获取数据分析模块的分析结果,并生成相应的操作建议,如此可以针对每一种风险指标超过预设阈值的情况提供有效的应对策略,从而为工作人员使用升降机提供科学客观指导。最后,本系统还包含了监测预警模块,用于获取施工升降机的运行风险值,并判断施工升降机的运行风险值是否大于预设运行风险阈值;当所述运行风险值大于预设运行风险阈值时,触发报警提示。因此本发明能够从多个维度综合评估升降机的运行风险,保证了风险评估结果的准确性;通过在各种风险超过阈值时触发报警,并生成操作建议以科学指导升降机使用,大大提升了升降机使用的安全性,增强了升降机安全监管的能效。
44、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,而非限制本公开。
本文地址:https://www.jishuxx.com/zhuanli/20240905/289282.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。