一种实现直驱XY平台精密轮廓跟踪的装置及方法
- 国知局
- 2024-09-11 14:17:48
本发明涉及数控加工控制,尤其涉及一种实现直驱xy平台精密轮廓跟踪的装置及方法。
背景技术:
1、随着智能制造、可持续制造和绿色制造的高质量发展,高精尖型数控装备性能的进一步提高已成为目前重要的研究方向。直驱xy平台是数控装备中实现高精密功能的主要功能部件,广泛应用于芯片封装、半导体制造和光学加工装备等高精度领域。
2、直驱xy平台由两台相互垂直的永磁直线同步电机构成,是一种典型的多轴运动平台,在实现二维平面工件加工过程中有高速度、高精度的优点。为避免传统的“旋转电机+滚珠丝杠”结构所带来的摩擦大、刚度差等问题,直驱xy平台采用直线电机直接驱动,由于机械传动环节的减少,导致平台对参数变化、负载扰动、外部扰动等不确定性的敏感性增大,从而其动态轨迹跟踪性能降低。此外,x轴电机与y轴电机之间还会产生运动不协调问题而降低轮廓精度。在直驱xy平台中,两个运动轴都会产生单轴跟踪误差,因为伺服控制具有延时效应,跟踪误差又会反应到系统的轮廓曲线上,从而造成轮廓误差。采用以往的以减小单轴跟踪误差为目标的控制方法时,往往不能有效减小轮廓误差,难以达到精密工件的加工质量。
3、因此,如何很好地解决上述问题,设计一种能够实现直驱xy平台精密轮廓跟踪的装置及方法具有重要意义。
技术实现思路
1、针对现有技术的不足,本发明提供一种实现直驱xy平台精密轮廓跟踪的装置及方法;
2、为解决上述技术问题,本发明所采取的技术方案是:
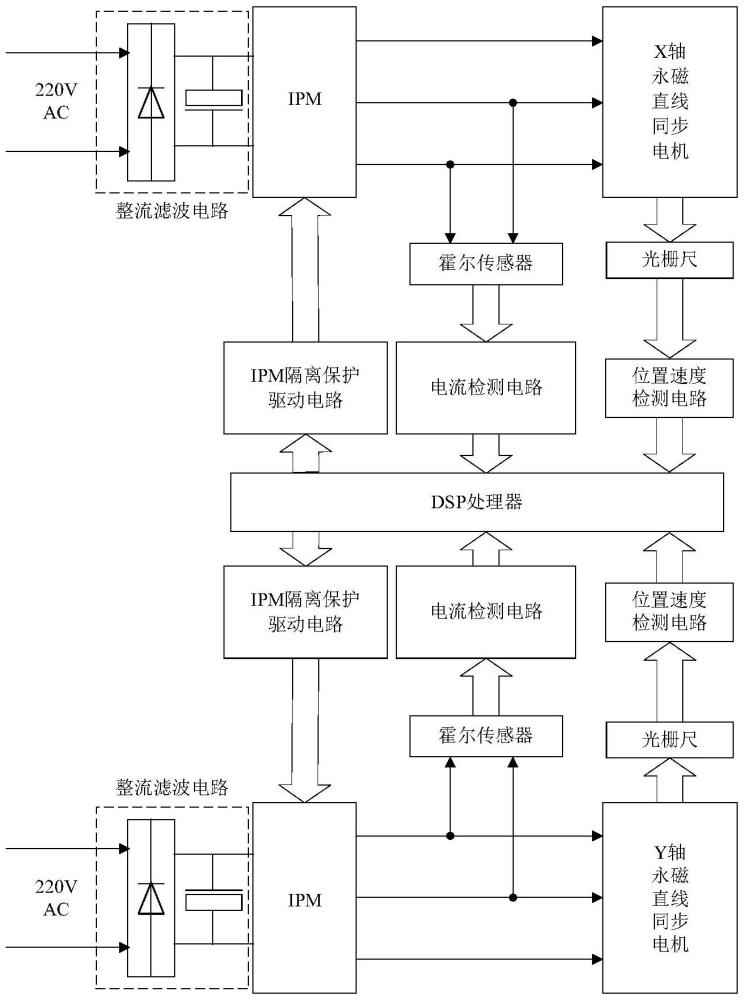
3、一方面,一种实现直驱xy平台精密轮廓跟踪的装置,包括:整流滤波电路、ipm逆变电路、检测电路、ipm隔离保护驱动电路、dsp处理器、上位机以及直驱xy平台;其中所述整流滤波电路、ipm逆变电路、检测电路和ipm隔离保护驱动电路分别有两套,对应于直驱xy平台的两个永磁同步电机;
4、所述整流滤波电路的输入端与三相交流电源相连,输出端与ipm逆变电路的一路输入端相连;所述ipm逆变电路输出端连接直驱xy平台的永磁直线同步电机,为永磁直线同步电机供电;
5、所述检测电路包括电流检测电路、位置速度检测电路以及检测元件,检测元件为霍尔传感器、直线光栅尺;其中所述电流检测电路的输入端通过霍尔传感器与ipm逆变电路的输出端相连,电流检测电路的输出端与dsp处理器的一路信号输入端相连,霍尔传感器采集永磁直线同步电机的动子电流,将采集的电流信号由模拟信号转换为dsp处理器能识别的数字信号;所述位置速度检测电路的输入端通过直线光栅尺与永磁直线同步电机的输出端相连,位置速度检测电路的输出端与dsp处理器的另一路信号输入端相连,通过直线光栅尺采集永磁直线同步电机动子的位置信号、速度信号,并将位置信号、速度信号由模拟信号转化为dsp处理器能识别的数字信号;
6、所述dsp处理器的pwm端口通过ipm隔离保护驱动电路与ipm逆变电路的另一路输入端相连。
7、所述上位机内置控制模块,对检测电路采集到的数据进行处理,再将处理过的数据信号与期望指令信号作差得到控制误差,将控制误差输入到轮廓误差模型中计算出轮廓误差,并将其作为自适应超螺旋时变滑模控制器的输入变量,执行自适应超螺旋时变滑模控制算法,设计降阶扰动观测器,最后将降阶扰动观测器和自适应超螺旋时变滑模控制算法结合所得到的控制律编程为c语言程序,并且下载到dsp处理器中运行,从而控制伺服驱动系统运行;
8、所述直驱xy运动平台由大理石底座、两台永磁直线同步电机、直线电机安装床身、电机安装托架、动子工作台、直线导轨和光栅检测装置组成;所述大理石底座为支撑基座,两台永磁直线同步电机具体包括x轴永磁直线同步电机和y轴永磁直线同步电机,二者正交安装;其中永磁直线同步电机的定子上交替安装n极和s极永磁体,动子则装备电枢绕组以产生驱动力;所述电机安装床身采用铸铁材质,固定安装在大理石底座上,并通过电机安装托架固定永磁直线同步电机;所述电机安装托架采用铝合金材质,所述光栅检测装置安装于电机安装托架,其读数头通过螺栓分别固定于x轴永磁直线同步电机和y轴永磁直线同步电机的动子上,y轴永磁直线同步电机安装于x轴永磁直线同步电机的动子平台上,实现嵌套式的运动结构;所述动子工作台与y轴永磁直线同步电机的动子线圈相连,通过对电机的驱动和控制,实现xy运动平台的精确移动;x轴永磁直线同步电机和y轴永磁直线同步电机的动子线圈均通过直线导轨进行支撑和引导;
9、另一方面,一种实现直驱xy平台精密轮廓跟踪方法,基于前述一种实现直驱xy平台精密轮廓跟踪的装置实现,包括以下步骤:
10、步骤1:在上位机中输入直驱xy运动平台的x轴永磁直线同步电机和y轴永磁直线同步电机的期望位置信号,两台永磁直线同步电机接收到期望位置信号后开始运动;
11、步骤2:对x轴永磁直线同步电机和y轴永磁直线同步电机的动子实际位置、速度及电流进行采样计算,并将实际位置与期望位置进行比较,分别得到x轴和y轴的位置误差;
12、在直驱xy运动平台上,两台永磁直线同步电机开始运行后,通过霍尔传感器对永磁直线同步电机的动子电流进行测量与采集;同时,直线光栅尺通过位置速度检测电路,输出两路正交方波脉冲信号和一路零位脉冲信号;这些脉冲信号被传送到dsp处理器的正交编码脉冲输入单元eqep;另外,设定dsp处理器的通用定时器为定向增减计数模式,根据接收到的两相正交方波脉冲信号的脉冲数量,确定动子的位置偏移;通过分析两相脉冲信号的超前关系,确定动子的转向,从而获取动子的实际位置和速度信息。
13、步骤3:利用在步骤2中获得的两台永磁直线同步电机的动子实际位置数据,在dsp处理器中进行计算,得出单轴位置跟踪误差;通过轮廓误差模型计算出等效轮廓误差;然后将等效轮廓误差输入到自适应超螺旋时变滑模轮廓控制器中,设计降阶扰动观测器来观测外部影响因素,并将观测结果前馈补偿到自适应超螺旋时变滑模控制中,最终得到总控制律;
14、步骤3.1:构建直驱xy平台伺服系统模型,包括直驱xy运动平台动力学模型和轮廓误差模型;
15、所述直驱xy运动平台动力学模型表示为
16、
17、式中,l=[lx,ly]t为直驱xy平台中永磁直线同步电机的动子实际位置,参数下角标中的x和y分别表示x轴永磁直线同步电机和y轴永磁直线同步电机,分别为l的一阶导数和二阶导数;m=diag[mx my]t为动子质量,diag[·]表示对角矩阵;b=diag[bx by]t为粘滞摩擦系数;d=[dx,dy]t为系统总不确定性动力学,包括参数变化、外部扰动和摩擦力;fe=[fex fey]t为电机电磁推力,表示为
18、fe=kfiq (2)
19、式中,kf=diag[kfx,kfy]为电磁推力系数;iq=[iqx iqy]t为q轴电流;
20、结合式(2),将式(1)改写为
21、
22、式中,u=[ux uy]t为系统控制规律;直驱xy运动平台动力学模型设计完成。
23、所述轮廓误差模型具体为,建立σ坐标系为固定坐标系,其横纵轴分别为x和y,代表直驱xy平台的两个进给驱动轴,在此坐标系下,曲线r表示由进给轴驱动xy运动平台的零件加工点的期望轮廓曲线;r=[rx ry]t为在σ坐标系下t时刻直驱xy平台中直线电机动子的参考位置;l=[lx ly]t表示直驱xy平台中直线电机的动子实际位置;eσ为单轴位置跟踪误差,即r到l之间的距离,根据步骤2中获得的两台永磁直线同步电机的动子实际位置数据,将其与期望位置作差,得单轴位置跟踪误差eσ为
24、eσ=r-l=[eσx eσy]t (4)
25、建立局部坐标系ω,其轴ωx在c处与r相切,轴ωy与轴ωx相互正交,在该坐标系中定义跟踪误差矩阵为eω=[eωx eωy]t,其中,eωx为切向分量,eωy为法向分量,根据几何关系将eω与eσ建立数学联系,表示为
26、
27、式中,θ为ω-∑坐标系之间的变换矩阵,θ为ωx轴和∑x轴之间的倾角;
28、直驱xy平台系统轮廓误差由法向分量eωy近似表示,将eωy在∑坐标系中进行正交分解,得
29、
30、式中γ为eωy到∑坐标系的变换矩阵;采用等效轮廓误差eωy代替轮廓误差eσ,轮廓误差模型设计完成;
31、步骤3.2:根据等效轮廓误差eωy,执行基于降阶扰动观测器的直驱xy平台自适应超螺旋时变滑模精密轮廓控制器的控制算法;
32、步骤3.2.1:设计自适应超螺旋时变滑模控制器astsmc;
33、已知在∑坐标系下,单轴位置跟踪误差矩阵为eσ,对其求一阶导数,得
34、
35、设计具有非线性函数的时变滑模面为
36、
37、其中,sk=[sx sy]t为非线性时变滑模面,下角标中的k=x,y,分别表示x轴和y轴永磁直线同步电机;为正对角矩阵,为二阶正实数矩阵;i为单位阵;
38、ηk=diag(ηk)为非线性函数矩阵,其中β>0为常数。
39、根据上式得
40、
41、同理,有
42、
43、因此,在式(8)中,有fk-ηk恒大于0成立,表明该时变滑模面参数满足hurwitz判据。
44、对式(8)求导,得
45、
46、将式(11)分别分解至x轴和y轴上;改写式(11)为
47、
48、忽略系统总不确定性动力学,即d=0,将式(3)代入式(12),得
49、
50、令得x轴和y轴电机的等效控制律ukeq为
51、
52、采用超螺旋算法设计系统的切换控制律,用于克服系统不确定性因素的影响。切换控制律设计为
53、
54、其中,k1、k2>0为切换系数。若控制律(15)在有限时间内收敛,需满足
55、
56、其中,ρk>|dk|为式(1)中x轴和y轴电机系统总不确定性的上界。
57、为加快系统状态轨迹到达滑模面的收敛速度,并提高控制器的自由度,设计自适应超螺旋切换控制律为
58、
59、其中,k3、k4、k5>0为自适应参数,满足
60、
61、其中,γk、μk、c3、εk、kmin>0。γk、εk为影响系统收敛速度的参数,μk为系统边界层厚度,kmin为保证系统稳定的增益最小值;当k3>kmin且|sk|-μk>0时,k3增大以保证系统快速收敛至边界层内部,当|sk|-μk<0时,k3则减小以削弱抖振,提高跟踪精度;k3≤kmin时,则需持续增大k3以保证系统稳定;当满足:|sk|>ωk1、ωk1≥μk、ωk2>0时,系统满足渐近稳定条件;
62、步骤3.2.2:设计降阶扰动观测器rodob;
63、将式(3)分解至x轴和y轴,得x轴和y轴控制律uk为
64、
65、其中,为x轴和y轴电机动子速度。考虑到系统运行过程中存在的参数变化,定义akn=mkn/kfkn、bkn=bkn/kfkn为标称参数;定义akr=mkr/kfkr、bkr=bkr/kfkr为实际参数,改写式(19)为
66、
67、其中,δak和δbk为参数变化量。令且uek=flk/kfkn,其中flk为x轴和y轴电机所受的负载扰动。
68、定义为前馈补偿量,针对x轴和y轴电机的传递函数表达式进行改写,得
69、
70、存在数学关系
71、
72、整理得
73、
74、继续整理得
75、
76、由于akn>>δak,改写式(24)得
77、
78、其中,udk=δbkkfkrlk+uek。
79、列写状态方程
80、
81、式(26)所示状态方程表示的被控对象为一个二阶线性动态系统,状态变量分别为和由于状态变量即x轴和y轴电机实际速度可测,故只需作为已知量对观测量进行估计;此时观测器的阶数为1,小于被控对象的实际阶数,故称rodob,设计rodob为
82、
83、其中,lk为观测增益,满足lk>0。
84、改写式(25)得
85、
86、将式(28)代入式(27),整理得
87、
88、定义代入式(29)得
89、
90、
91、故通过引入的新变量ξk进行观测。
92、定义观测误差求导得
93、
94、将式(31)代入式(32)得
95、
96、式(33)在有限时间内收敛,收敛时间为
97、euk(t)=euk(0)exp(-lkt) (34)
98、步骤4:dsp处理器产生相应的六路pwm脉冲信号,分别驱动永磁直线同步电机运行;
99、采用上述技术方案所产生的有益效果在于:
100、本发明提供一种实现直驱xy平台精密轮廓跟踪的装置及方法,自适应超螺旋时变滑模控制方法中采用非线性时变滑模面替代传统线性滑模面,同时引入自适应超螺旋控制规律作为系统的切换控制规律,不但可以显著削弱抖振,而且能够有效提高系统的抗干扰能力以及系统响应速度。其次,为进一步提高系统对不确定性因素的鲁棒性,降阶扰动观测器的引入可以对系统存在的参数变化和外部扰动等不确定性因素进行估计并前馈补偿,提高系统的鲁棒性。该方法利用自适应超螺旋时变滑模控制克服传统滑模控制的抖振问题,提高系统的响应速度,同时结合降阶扰动观测器估计并补偿系统不确定性,提高系统的轮廓跟踪精度。另外,采用高性能的霍尔传感器和光栅尺,提高了采集信号的精度,使用tms320f28335芯片作为核心处理器提升了伺服系统处理数据的能力,提高了伺服系统的加工精度。
本文地址:https://www.jishuxx.com/zhuanli/20240911/290076.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。