一种清洗机器人及其控制方法与流程
- 国知局
- 2024-09-11 14:14:38
本发明涉及机器自动化清洁,特别是涉及一种清洗机器人及其控制方法。
背景技术:
1、游泳池是人们从事游泳运动的场地。泳池在长期使用过程中都会出现一些垃圾或细菌,因此泳池需要定期进行清洁处理。
2、目前,通常是通过清洗机器人对泳池进行清洁。清洗机器人包括水上清洗机器人以及水下清洗机器人,分别用于清洁泳池周边环境、泳池底部以及墙壁。其中,水下清洗机器人通过搭载清洁机构在泳池底部以及墙壁进行移动,实现对泳池底部以及墙壁的清洁。为了使清洗机器人的具备更好的清洁效果以及运动覆盖率,往往需要配备距离传感器、出水传感器等多种传感器,以使得清洗机器人具备一定的路径规划能力。然而,若清洗机器人采用过多的传感器,将导致清洗机器人的成本增加。
技术实现思路
1、本发明所要解决的技术问题是:提供一种清洗机器人及其控制方法,降低清洗机器人成本的同时,实现对泳池的全面清洁。
2、为了解决上述技术问题,本发明采用的技术方案为:
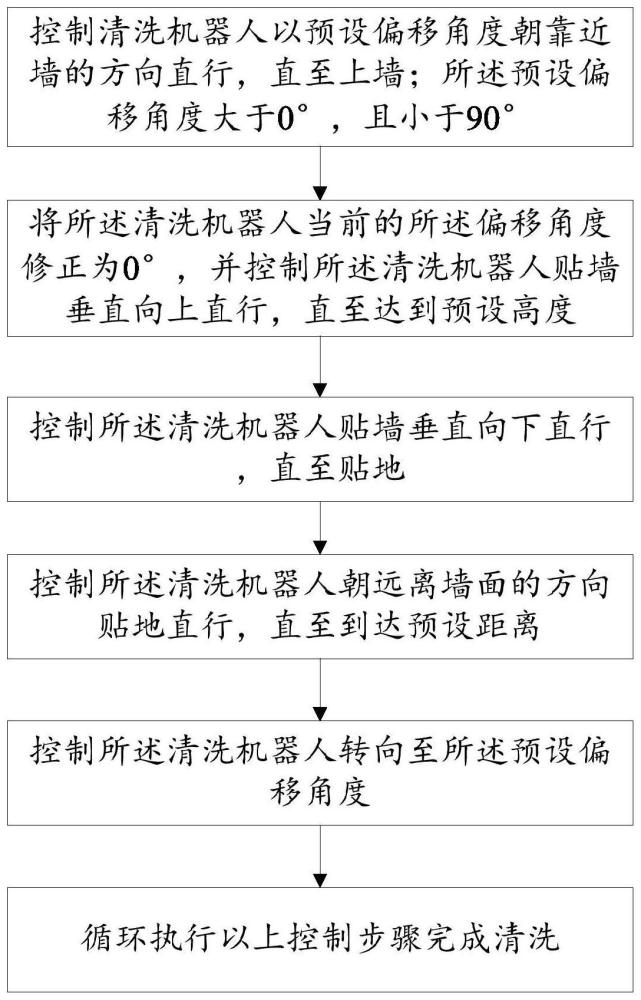
3、控制清洗机器人以预设偏移角度朝靠近墙的方向直行,直至上墙;所述预设偏移角度大于0°,且小于90°;
4、将所述清洗机器人当前的所述偏移角度修正为0°,并控制所述清洗机器人贴墙垂直向上直行,直至达到预设高度;
5、控制所述清洗机器人贴墙垂直向下直行,直至贴地;
6、控制所述清洗机器人朝远离墙面的方向贴地直行,直至到达预设距离;
7、控制所述清洗机器人转向至所述预设偏移角度;
8、循环执行以上控制步骤完成清洗。
9、为了解决上述技术问题,本发明采用的另一技术方案为:
10、一种清洗机器人,包括惯性传感器、存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述的一种清洗机器人的控制方法中的各个步骤;所述惯性传感器用于实时获取清洗机器人的运动信息。
11、本发明的有益效果在于:通过惯性传感器实时获取清洗机器人的运动信息,从而能够基于清洗机器人的当前运动运动对清洗机器人进行控制,并在控制过程中使清洗机器人朝倾斜于泳池壁的方向前进,直到检测到上墙,上墙过程中不需要控制清洗机器人行走的预设的时间,使得在遇到泳池夹角处时能够保持前进直至上墙,避免出现在墙角处卡死的问题;并且整个过程仅通过惯性传感器就能够实现对泳池墙壁的清洗路径规划,相对于现有技术中需要通过距离传感器以及出水传感器等多种传感器组合进行控制的方案,极大降低了清洗机器人的成本。
技术特征:1.一种清洗机器人的控制方法,其特征在于,包括步骤:
2.根据权利要求1所述的一种清洗机器人的控制方法,其特征在于,所述控制清洗机器人以预设偏移角度朝靠近墙的方向直行包括:
3.根据权利要求1所述的一种清洗机器人的控制方法,其特征在于,所述将所述清洗机器人当前的所述偏移角度修正为0°包括:
4.根据权利要求3所述的一种清洗机器人的控制方法,其特征在于,所述根据所述旋转角速度将当前所述偏移角度调整0°包括:
5.根据权利要求1所述的一种清洗机器人的控制方法,其特征在于,所述控制所述清洗机器人贴墙垂直向上直行,直至达到预设高度包括:
6.根据权利要求1所述的一种清洗机器人的控制方法,其特征在于,所述控制所述清洗机器人贴墙垂直向下直行,直至贴地包括:
7.根据权利要求1所述的一种清洗机器人的控制方法,其特征在于,所述控制所述清洗机器人贴墙垂直向下直行之前包括:
8.根据权利要求2所述的一种清洗机器人的控制方法,其特征在于,通过惯性传感器实时获取清洗机器人沿x方向的加速度、沿y方向的加速度以及沿z方向的加速度;
9.一种清洗机器人,包括惯性传感器、存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1-8任意一项所述的一种清洗机器人的控制方法中的各个步骤;所述惯性传感器用于实时获取清洗机器人的运动信息。
10.根据权利要求9所述的一种清洗机器人,其特征在于,还包括喷水电机;
技术总结本发明公开一种清洗机器人及其控制方法,通过惯性传感器实时获取清洗机器人的运动信息,从而能够基于清洗机器人的当前运动运动对清洗机器人进行控制,并在控制过程中使清洗机器人朝倾斜于泳池壁的方向前进,直到检测到上墙,上墙过程中不需要控制清洗机器人行走的预设的时间,使得在遇到泳池夹角处时能够保持前进直至上墙,避免出现在墙角处卡死的问题;并且整个过程仅通过惯性传感器就能够实现对泳池墙壁的清洗路径规划,相对于现有技术中需要通过距离传感器以及出水传感器等多种传感器组合进行控制的方案,极大降低了清洗机器人的成本。技术研发人员:汪洋,于学良,周继勇受保护的技术使用者:深圳市元鼎智能创新有限公司技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/289748.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。