网球击球训练机器人及其人机交互方法
- 国知局
- 2024-09-11 14:18:01
本发明属于运动训练机器人,涉及一种智能网球击球训练装置,具体地说,涉及一种可模拟不同网球轨迹并可视化反馈动作表现的体育训练机器人。
背景技术:
1、网球运动需要精细控制击球动作,熟练掌握击球技术是网球训练中的重要环节。目前,初学者击球训练主要依赖自主感悟或教练指导。然而,由于训练场地稀缺、陪练费用高、教练水平参差不齐,影响了初学者网球训练的积极性和效率,尤其是在居家环境下难以开展网球技术学习与训练。
2、近年来,为提高网球击球动作的训练效率,出现了一些可帮助训练进行击球训练的自动化装置。主要包括在较小空间即可应用的定点击球训练器和在实际球场开展训练的网球发球机两大类。如申请号为202110512964.4的专利提出了一种网球训练用定点击球器,网球由周向均匀分布的固定在托体上柔性支撑片承载,避免了需要将支撑穿过球体来进行固定。该装置的优点是既能固定网球,也不会阻扰网球的横向运动,能使训练者获得真实的击球体验;缺点是击球点固定,无法模拟多方向来球训练,更无法对训练者的击球表现进行反馈。申请号为202410076733.7的专利提出了一种包含指定模式、随机模式、智能级别模式等多种运动模式的四轮网球发球机,可预判来球轨迹和落点,据此判断运动员的能力级别,并调整为对应级别的回球训练。该装置的优点是发球和回球的速度、落点更加多样化,且融入了一定的智能策略,使得训练更加灵活。缺点是训练者无法及时感知到击球的效果并做出相应的动作调整,且依赖网球场地开展训练。综上,现有的网球击球训练装置智能化程度不足,缺乏能够自主感知训练者动作并有效反馈击球效果的训练机器人。
技术实现思路
1、本发明的目的在于提供一种可模拟复杂球路的网球击球训练机器人设计方案,使其具有其高度调节、精准移动、受击后自平衡等能力,并提出对训练者动作的感知和分析方法与交互策略。此技术打破了场地的限制,为训练者提供一个可控的击球训练实体装置,降低了网球训练的门槛,为训练者提供一种动作分析的工具,有助于实现现代智能化网球训练。
2、为解决上述技术问题,本发明采用如下技术方案实现的,结合附图说明如下:
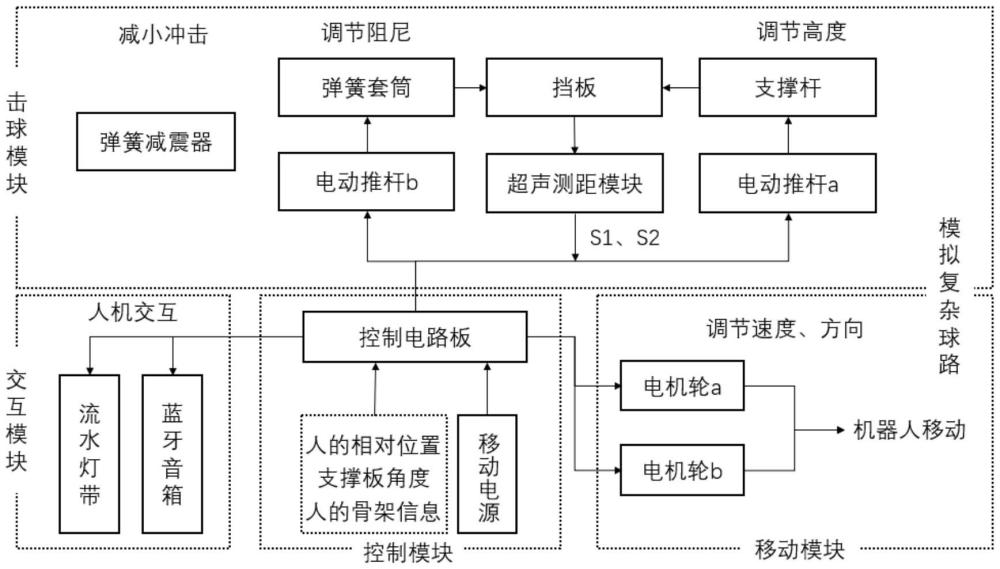
3、一种网球击球训练机器人,包括移动模块、击球模块、交互模块和控制模块;
4、移动模块作为机器人的底座,设置在击球模块下方,控制模块固定在移动模块上,交互模块分布于在击球模块周围。
5、进一步地,所述移动模块包括两个电机轮,两个电机轮通过支架连接至底板,底板上方安装外壳;壳体内包含控制模块、击球模块的部分部件和交互模块的蓝牙音箱;
6、所述移动模块采用双轮差速驱动,即控制电路板分别控制两个电机轮的转速与角度,当两个电机轮转速相同时网球陪练机器人能够直线行驶,当两个电机轮存在速度差时网球陪练机器人能够灵活转向;移动模块通过pid控制策略完成自平衡。
7、进一步地,所述击球模块包括弹簧减震器、高度调节机构、阻尼调节机构和网球;弹簧减震器由四根相同的弹簧和上下两块正方形连接板组成;所述弹簧减震器布置在移动模块上方,下方连接板通过四个螺栓固定在移动模块的底板上;上方连接板通过四个螺栓与高度调节机构相连。
8、高度调节机构包括一个电动推杆a、一个超声测距传感器a、传感器支撑板a以及挡板;电动推杆a下方通过四个螺栓孔锁紧在弹簧减震器的上方连接板上,电动推杆a上方使用两个相对的螺栓与阻尼调节机构连接;传感器支撑板a分为左右两部分,通过前后螺栓锁紧在电动推杆侧面并连为一体;所述支撑板设有一长方形平台,用来承载超声测距传感器,并用紧固螺钉将超声波测距传感器固定在平台;所述支撑板侧面设有类似手臂支撑面,用来与交互模块连接;
9、所述阻尼调节机构包括一个支撑筒、一个弹簧、一个网球支撑架、两个相同的电动推杆b、一个刚性套、一个超声测距传感器b、传感器支撑板b以及挡板;所述支撑筒下端通过螺栓与高度调节模块相连,上端套在弹簧内,并焊接在一起;所述网球支撑架焊接在弹簧上端,网球穿过支撑架横杆固定在其上;所述两个电动推杆b对称分布在支撑筒的两侧,电动推杆上、下端设有固定孔,通过长螺栓分别固定在支撑筒和刚性套上;所述刚性套套在弹簧外;所述传感器支撑板b分为左右两部分,通过横向的螺栓锁定在刚性套上,从而成为一体;所述超声测距传感器通过螺栓固定在支撑板上;所述挡板与高度调节机构的挡板为同一块挡板。
10、进一步地,所述交互模块由穿戴在训练者身上的惯性测量单元imu、安装在机器人表面的灯带、蓝牙音箱组成;imu传感器采集训练者的动作姿态信息,数据通过无线传输至机器人的单片机后,结合人体运动链理论求解运动学特征,通过灯带将训练者的动作表现直观反馈给训练者。
11、进一步地,所述人体运动链理论求解运动学特征,具体方法包括:
12、定义手部贡献速度用来量化仅由身体部位i发力对手部产生的速度,对于网球击球动作的关键部位简化为胯(i=1),胸(i=2),肩(i=3),轴(i=4),手(i=5);
13、手部贡献速度vci(t)是随着时间t变化的函数,由下式计算:
14、
15、其中,特定身体部位关节位置为pi,持拍手位置为p5;ωi(t)表示关节i测得的角速度值,ωi(t)-ωi-1(t)表示仅由关节i运动在i处产生的角速度值;p5(t)-pi(t)表示,关节i处到持拍手的空间矢量;
16、计算手部累计贡献速度vai(t)描述人体运动链关系:
17、
18、在手部累计贡献速度中,设胯部在t1时刻达到最大值va1max,胸部在在t2时刻达到最大值va2max,肩部在t3时刻达到最大值va3max,肘部在t4时刻达到最大值va4max;胸部与胯部的时间差δt1=t2-t1,肩部与胸部的时间差为δt2=t3-t2,肘部与肩部的时间差为δt3=t4-t3。
19、进一步地,结合人体运动链理论求解运动学特征,通过灯带将训练者的动作表现直观反馈给训练者,具体方法:
20、灯带通过颜色显示动作的协调性,绿色部分代表该部位动作协调性良好,黄色表示协调性一般,红色表示协调性不好;根据专业运动员各部位发力时间差情况:δt1在0.01-0.03之间为绿色,-0.02至0.01、0.03至0.08之间为黄色,δt1小于-0.02或大于0.08则为红色;δt2在0.01-0.03之间为绿色,-0.03至0.01、0.03-0.1之间为黄色,小于-0.03或大于0.1则为红色;δt3在0.01-0.03之间为绿色,-0.03至0.01、0.03-0.08之间为黄色,小于-0.03或大于0.08则为红色。
21、设击球时刻为td,各个部位的手部累计贡献速度值为va1(td)、va2(td)、va3(td)、va4(td);身体部位i在击球时的贡献速度为cri
22、
23、cr值的大小在0-1之间,对应位置的灯带亮度由cr值决定,cr值越大则灯带越亮。即灯带亮度代表对应位置的发力程度,越用力则亮度越大。
24、进一步地,通过蓝牙音箱播报imu测得的击球速度值,帮助训练者及时改正技术动作。
25、进一步地,所述控制模块由控制电路板和移动电源构成,能够将控制指令转换为各电机能够处理的信号,从而执行机器人的移动、调节、反馈功能;控制电路板控制移动模块中的电机轮转动以及击球模块的电动推杆伸缩,使网球模拟真实的轨迹移动到训练者身前;当训练者击打来自训练机器人的网球后,imu实时提取人体的骨架信息,并发送给控制电路板,控制电路板通过收到的骨架信息进行运动链的解算,得到人体各部位力量实时传递关系,并通过控制腿部灯带、腰部灯带、上肢灯带反映出来。
26、一种网球击球训练机器人的人机交互方法,其特征在于:
27、控制电路板4-1通过控制移动模块1中电机轮a和电机轮b的通断,来实现网球击球训练机器人的启停;控制电路板4-1通过控制移动模块1中电机轮a和电机轮b的速度,来实现击球模块2网球2-13水平移动速度和方向的调节;控制电路板4-1通过控制移动模块1中电机轮a和电机轮b的速度,来实现击球模块2底板1-3保持平衡;控制电路板4-1通过控制击球模块2中电动推杆a 2-2的伸缩速度和里程,来实现击球模块2网球2-13竖直方向和位置的调节;控制电路板4-1通过控制击球模块2中电动推杆b 2-6的伸缩速度和里程来控制击球模块2中弹簧2-11被刚性套2-7套住的长度,实现击球阻尼的调节;控制电路板4-1通过控制腿部灯带3-1、腰部灯带3-2、上肢灯带3-3的颜色与明暗,来实现从视觉上对击球者击球表现的反馈;控制电路板4-1通过控制蓝牙音箱3-4的播报消息,来实现对击球者动作表现的提示。
28、进一步地,当训练者击打来自训练机器人的网球后,双目相机实时提取人体的骨架信息,并发送给控制电路板4-1,控制电路板4-1通过收到的骨架信息进行运动链的解算,得到人体各部位力量实时传递关系,并通过控制腿部灯带3-1、腰部灯带3-2、上肢灯带3-3反映出来;在击打完时,蓝牙音箱通过语音播报击球速度;同时,控制电路板4-1检测到底板1-3倾斜,并控制电机轮1-1旋转后退以调整底板1-3角度使底板1-3重新平衡;平衡后,间隔一段时间控制电路板再次计算位置并控制网球以一定速度和轨迹飞来,如此循环往复,训练者可以完成不同模式下的多球训练。
29、与现有技术相比本发明的有益效果是:
30、1.本发明所述的网球击球训练机器人使用大直径双轮差速驱动并结合高度调整机构,实现网球空间位置的快速精准调节,可模拟网球运动中对手的来球轨迹,为训练者提供难度可控的网球击球练习物理载体。与传统的静态击球训练器相比,可更好匹配不同水平训练者的练习要求,增加了训练任务的多样性。
31、2.本发明所述的网球击球训练机器人设计了击球位置刚性调整机构,搭配网球运动速度模拟,实现训练者击球力度和阻力的体感反馈。与传统的固定式击球器相比,能够为训练者提供多样化的击球体验。
32、3.本发明所述面向网球击球训练机器人的人机交互方法,能够在科学感知分析训练者动作的前提下,可视化反馈训练者的动作表现。与传统缺乏人机交互的训练装置相比,本专利所述人机交互方案能够帮助训练者快速认知自身动作存在的问题,促进训练者生成正确动作的运动记忆,极大程度提升动作学习效率。
本文地址:https://www.jishuxx.com/zhuanli/20240911/290090.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表