一种压电驱动的空间机械臂及其工作方法
- 国知局
- 2024-09-11 14:20:35
本发明涉及压电驱动技术和空间对接,尤其涉及一种压电驱动的空间机械臂及其工作方法。
背景技术:
1、深空探测是拓展人类生存空间、开发太空新能源的重大科技创新领域,也是大国竞争的重要领域。未来深空探测,合作与非合作航天器在轨服务,针对空间站等大型航天器的在轨组装,航天器的捕获、释放、回收和维修,载人登月,火星取样返回,空间垃圾的清除等任务均需要空间机械臂技术的支持。空间机械臂技术是扩展航天器功能、提升航天器性能的重要手段,它是一项增强人类探索和开发太空能力的关键技术。
2、现有空间机械臂通常采用电磁电机配合齿轮减速器的驱动方案。一方面难以适应太空的极端环境(高低温、高真空以及宇宙射线等),另一方面导致整体结构的复杂:1)高低温环境不仅容易使电磁电机的永磁体发生不可逆转的失效,而且会导致绝缘层的破坏,造成电磁电机失效;2)高真空环境不仅增加了密封系统的难度,而且自身热量累积容易导致电磁电机的损坏,同时真空环境容易引起润滑剂挥发,加剧磨损,使得运动精度难以保障;3)传动机构使用了大量的齿轮和轴承等传动零件,导致整体结构复杂,且不易更换维修。
3、基于压电激励和摩擦驱动原理发展起来的压电驱动技术,具有直接驱动、电磁兼容性好、环境适应性好、无需减速机构和制动装置、响应快、断电自锁、定位精度高、结构功能一体化设计等特点。采用压电驱动技术构建的空间机械臂,不仅能够解除太空环境的制约,并且可靠性高、可控性好、结构紧凑、机械集成度高、控制简便,且零件的更换与维修较为方便。
技术实现思路
1、本发明所要解决的技术问题是针对背景技术中所涉及到的缺陷,提供一种压电驱动的空间机械臂及其工作方法。
2、本发明为解决上述技术问题采用以下技术方案:
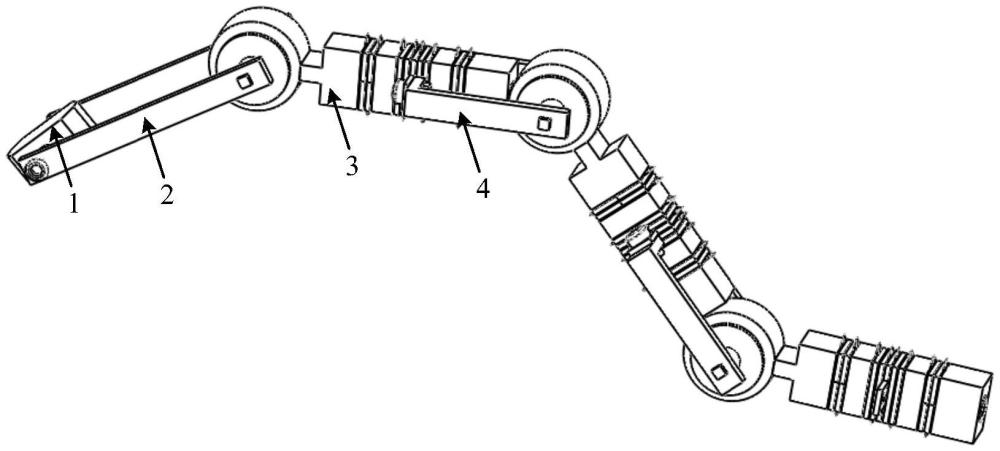
3、一种压电驱动的空间机械臂,包含m个关节压电作动器、末端执行机构、第一至第二驱动臂、以及m-1个连接组件,m为大于或等于2的自然数;
4、所述末端执行机构用于根据指令在太空进行操作;
5、所述关节压电作动器包含转子组件和定子组件;
6、所述定子组件包含驱动环、连接杆和压电复合梁;
7、所述压电复合梁包含前梁、第一中梁、第二中梁、后梁、夹持片、预紧螺栓、第一至第二弯振压电模块、以及第一至第二纵振压电模块;
8、所述前梁、第一中梁、第二中梁、后梁为截面形状相同的长方体,均包含两个端面以及首尾依次相连的第一至第四侧面,其中,所述前梁的一个端面中心设有用于和所述预紧螺栓相匹配的螺纹盲孔,第一中梁、第二中梁沿其轴线设有供预紧螺栓穿过的通孔,后梁的一个端面的中心设有和所述预紧螺栓相配合的沉头通孔;
9、所述第一弯振压电模块、第二弯振压电模块均包含2个和前梁截面形状相同且中心设有供预紧螺栓穿过的通孔的二分区压电陶瓷片,2个二分区压电陶瓷片结构相同,均沿厚度方向极化且分界线平行于其一条边;2个二分区压电陶瓷片依次层叠且分界线共面,同一个二分区压电陶瓷片内两个分区的极化方向相反,相邻二分区压电陶瓷片的极化方向相反;
10、所述第一纵振压电模块、第二纵振压电模块均包含2个和前梁截面形状相同且中心设有供预紧螺栓穿过的通孔的单分区压电陶瓷片,2个单分区压电陶瓷片依次层叠,均沿厚度方向极化且极化方向相反;
11、所述夹持片形状和前梁截面形状相同,中心设有供预紧螺栓穿过的通孔,其中两条边上对称设有用于将定子组件和外界固定的耳片;
12、所述预紧螺栓依次穿过后梁、第二弯振压电模块、第二中梁、第二纵振压电模块、夹持片、第一纵振压电模块、第一中梁、第一弯振压电模块后和所述前梁的螺纹盲孔螺纹相连,将第一弯振压电模块、第一纵振压电模块、夹持片、第二纵振压电模块、第二弯振压电模块夹紧,使得第一弯振压电模块中第一个二分区压电陶瓷片和第二弯振压电模块中第一个二分区压电陶瓷片的极化方向相反,第一纵振压电模块中第一个单分区压电陶瓷片和第二纵振压电模块中第一个单分区压电陶瓷片的极化方向相同;
13、所述驱动环为两端开口的空心圆柱体,驱动环的内壁上沿周向均匀设有k个驱动齿,k为大于等于3的自然数;
14、所述驱动齿呈条状,平行于驱动环的轴线设置,驱动齿两端均设有倒角,形成用于和所述转子组件相抵的接触面;
15、所述连接杆一端和所述前梁的远离后梁的一端同轴固连,另一端呈弧面,和所述驱动环的外壁固连;所述连接杆的轴线经过驱动环的中心,驱动环的两个端面和前梁的第一、第三侧面平行;
16、所述转子组件包含第一转子、第二转子、预紧弹簧、调节螺母和输出轴;
17、所述输出轴包含依次同轴固连的第一固定部、调节部、限位部和第二固定部,其中,第一固定部、第二固定部用于将转子组件和外界固连;调节部为和所述调节螺母相配合的螺纹柱;限位部为正四棱柱;
18、所述第一转子、第二转子结构相同,均呈圆台状,且中心均设有用于和所述输出轴相配合的方形限位滑孔;
19、所述第一转子、第二转子均套在输出轴的限位部上,能够沿输出轴的限位部自由滑动;第一转子、第二转子面积较小的一端相对,第二转子位于第一转子和第二固定部之间;所述输出轴的第二固定部上设有用于防止第二转子脱离限位部的环形凸起;
20、所述输出轴和所述驱动环同轴,第二转子的侧壁和k个驱动齿同一侧的接触面相抵,第一转子的侧壁和k个驱动齿另一侧的接触面相抵;所述调节螺母和输出轴的调节部螺纹相连;所述预紧弹簧套在输出轴的调节部外,一端和所述第一转子相抵,另一端和所述调节螺母相抵;
21、所述连接组件包含第一连接臂和第二连接臂;
22、所述第一连接臂、第二连接臂结构相同,均呈l型,均包含短板和长板,所述短板一端和长板一端垂直固连;
23、所述m个关节压电作动器、m-1个连接组件依次交替相连,其中,第i个连接组件的第一连接臂的短板和第i-1个关节压电作动器的第一固定耳片固连,第i个连接组件的第一连接臂的长板和所述第i个关节压电作动器的输出轴的第一固定部固连,第i个连接组件的第二连接臂的短板和第i-1个关节压电作动器的第二固定耳片固连,第i个连接组件的第二连接臂的长板和所述第i个关节压电作动器的输出轴的第二固定部固连,i为大于1小于等于m的自然数;
24、第一驱动臂、第二驱动臂平行设置;第一驱动臂、第二驱动臂的一端均和所述末端执行机构固连,另一端分别和所述第1个关节压电作动器的输出轴的第一固定部、第二固定部对应固连。
25、作为本发明一种压电驱动的空间机械臂进一步的优化方案,所述连接杆由远离驱动环的一端至和驱动环相连的一端的横截面面积逐渐减小,用于放大压电复合梁上工作模态的振幅。
26、本发明还公开了一种该压电驱动的空间机械臂的关节压电作动器驱动方法,采用单相电压信号驱动关节压电作动器:
27、步骤a.1),如果需要驱动第一转子、第二转子正向旋转,对第一、第二纵振压电模块施加第一简谐电压信号,激发出压电复合梁的2n+1阶纵向振动模态,n为大于等于0的正整数,诱发驱动环的k阶面内弯曲振动模态a,在简谐振动下每个驱动齿的运动轨迹均为一个尖椭圆,在摩擦力作用下,驱动第一转子、第二转子正向旋转;
28、步骤a.2),如果需要驱动第一转子、第二转子反向旋转,停止第一、第二纵振压电模块施加第一简谐电压信号,对第一、第二弯振压电模块施加第二简谐电压信号,激发出压电复合梁的2n+2阶弯曲振动模态,激励驱动环产生k阶面内弯曲振动模态b,k阶面内弯曲振动模态b与k阶面内弯曲振动模态a在空间上存在π/2的相位差,此时驱动齿的运动轨迹为一个反向的尖椭圆,在摩擦力作用下,驱动第一转子、第二转子反向旋转。
29、本发明还公开了另一种该压电驱动的空间机械臂的关节压电作动器驱动方法,采用两相简谐电压信号驱动关节压电作动器:
30、步骤b.1),如果需要驱动第一转子、第二转子正向旋转,对第一、第二纵振压电模块施加第一简谐电压信号,对第一、第二弯振压电模块施加第二简谐电压信号,第一、第二简谐电压信号在时间上的相位差为π/2,使得驱动环产生的两个具有π/2空间相位差的面内弯曲振动模态被同时激励出,此驱动环的两个面内弯曲振动模态叠加成一个行波,在行波的作用下驱动齿做椭圆运动,在摩擦作用下驱动第一转子、第二转子正向旋转;
31、步骤b.2),如果需要实现转子组件反向旋转,将第一、第二简谐电压信号在时间上的相位差变更为-π/2,使得驱动齿的椭圆轨迹反向运动,在摩擦作用下驱动第一转子、第二转子反向旋转。
32、本发明采用以上技术方案与现有技术相比,具有以下技术效果:
33、本发明提出了一种压电驱动的空间机械臂,利用压电材料的逆压电效应,通过摩擦作用驱动转子带动连接板转动,实现机械臂关节的驱动,通过同时驱动多个机械臂关节,实现整个空间机械臂的运动。本发明不需要复杂的传动和减速机构,结构简单,易于小型化;可靠性好,能够在强宇宙射线及真空环境下工作;各驱动关节都可正、反转,且能自由选择驱动关节的数量,灵活性强;各组件均为模块化设计,通用性好。
本文地址:https://www.jishuxx.com/zhuanli/20240911/290266.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表