一种仿生机器蛇
- 国知局
- 2024-09-11 14:15:43
本发明涉及仿生机器人,具体涉及一种仿生机器蛇。
背景技术:
1、随着社会的发展以及人类的需要,一些在特定环境中拥有独特技巧和能力的机器人应运而生,蛇形机器人是按照蛇的骨骼和运动原理所制造的仿生机器人,具有独特的身体结构和运动形式。仿生机器蛇具备多自由度的运动能力,其运动特点与生物蛇的运动极其贴合。仿生机器蛇因身体细长、横截面小和环境适应性强,能够应用于很多危险和复杂的环境中,并且可因其特定的结构和隐蔽性作军事用途。在用于地下管道探测方面可以减少地面人员进入地下造成中毒等危险。但是现有仿生机器蛇存在结构复杂的问题,并且在抗震救灾等场景下对于坑洞等细小空间存在难以对人员进行搜索和救援的问题。
2、由于蛇形机器人可以带来诸多好处和便利,因此急需研发一种结构简单、造价低、移动灵活的仿生机器蛇。
技术实现思路
1、本发明提供了一种仿生机器蛇,该仿生机器蛇具有结构简单、造价低、移动灵活、可以模拟生物蛇的运动、实现运动和感应避障的特点,解决了现有仿生机器蛇结构复杂、造价高的问题,同时可以解决抗震救灾中坑洞等细小空间人员搜索和救援问题。
2、本发明采用以下具体技术方案:
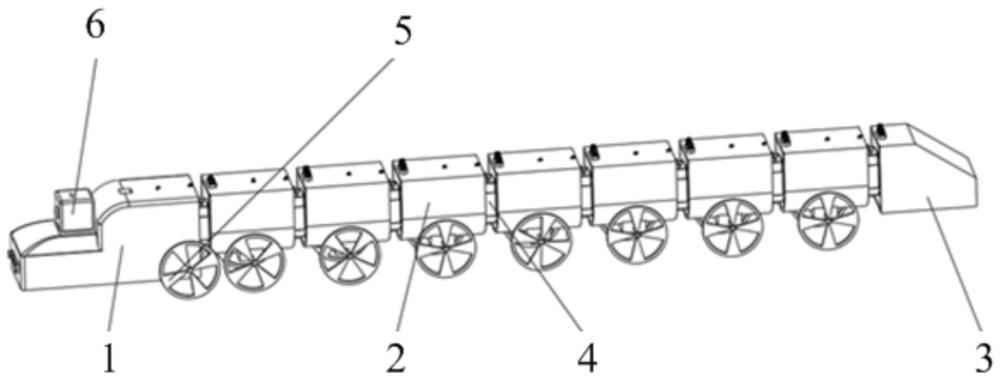
3、一种仿生机器蛇,该仿生机器蛇包括仿生蛇头、多个关节模块、仿生蛇尾、多个舵机以及滚轮;
4、所述仿生蛇头、多个所述关节模块以及所述仿生蛇尾通过所述舵机从前到后依次转动连接;
5、所述仿生蛇头的外部固定安装有摄像头和第一光源,所述仿生蛇头的内部固定安装有红外测距模块、控制器以及第一电池;所述控制器与所述红外测距模块、所述摄像头、所述第一电池、所述第一光源以及所述舵机通过线缆相连;所述控制器设置有用于传输无线信号的无线传输模块;
6、所述仿生蛇尾的内部固定安装有第二电池,所述仿生蛇尾外部固定安装有第二光源;所述第二光源与所述第二电池和所述控制器通过线缆连接;
7、在所述仿生蛇头和每个关节模块的底端均安装有两个所述滚轮;
8、在每个所述关节模块和所述仿生蛇尾内均固定安装有一个所述舵机;
9、所述舵机设置有旋转臂,并通过所述旋转臂与前端的所述仿生蛇头或者所述关节模块相连,并通过所述舵机驱动实现蛇形爬动。
10、更进一步地,所述舵机通过螺纹连接的螺栓和螺母吊装于所述关节模块和所述仿生蛇尾内,所述舵机下侧的穿线空间用于安装线缆。
11、更进一步地,所述关节模块的关节外壳由上侧的矩形外壳和下侧的弧形外壳相连接构成;
12、两个所述滚轮共轴安装于所述弧形外壳的底端。
13、更进一步地,相邻两个所述舵机之间的最大转角为30°;
14、沿从所述仿生蛇头到所述仿生蛇尾的方向,各个所述舵机的转角随时间呈正弦关系变化。
15、更进一步地,所述仿生蛇头为前低后高的阶梯型结构,所述摄像头固定安装于前端台阶的顶面,所述仿生蛇头的前端面设置有用于使所述红外测距模块的探头露出的通孔。
16、更进一步地,所述无线传输模块为蓝牙。
17、更进一步地,所述仿生蛇头和所述仿生蛇尾的内部均设置有电池盒,所述电池盒分别用于固定安装所述第一电池和所述第二电池。
18、更进一步地,所述第一光源和所述第二光源均为led灯。
19、更进一步地,所述关节模块、所述仿生蛇头和所述仿生蛇尾均采用pla(polylactic acid,聚乳酸)塑料制作而成。
20、更进一步地,所述第一电池和所述第二电池均为可充电锂电池组。
21、有益效果:
22、本发明仿生机器蛇的仿生蛇头与仿生蛇尾通过多个依次相连的关节模块转动连接形成,在每个关节模块和仿生蛇尾内均安装有一个舵机,通过舵机控制与其相连的仿生蛇头或者关节模块摆动,前后相邻的两个舵机在同一个平面内摆动,使得整个蛇身可以形成波形,从而实现仿生机器蛇的蜿蜒运动;仿生蛇头上设置有用于拍摄环境影像的摄像头、用于测量前方障碍物距离的红外测距模块以及用于实现整个仿生机器蛇控制功能的控制器,通过红外测距模块可以搜集前方障碍物信息,为自动前行提供避障信息;控制器在收到红外测距模块的检测信号之后,将电信号实时传给舵机,通过舵机输出角位移完成实时控制;仿生蛇头和仿生蛇尾均设置有用于提供电能的电池;仿生蛇头设置的第一光源和仿生蛇尾设置的第二光源可以照亮四周,便于摄像头通过无线传输模块将实时画面进行传输,能够进入细小空间进行人员搜索和救援;上述仿生机器蛇无需电机等驱动装置即可模仿蛇的蜿蜒运动,并具有结构简单、成本低、移动灵活、可以模拟生物蛇的运动、实现运动和感应避障的特点,解决了现有仿生机器蛇结构复杂、造价高的问题,同时可以解决抗震救灾中坑洞等细小空间人员搜索和救援问题。
23、因此,上述仿生机器蛇能够广泛应用到抗震救灾、人员搜救等领域。
技术特征:1.一种仿生机器蛇,其特征在于,包括仿生蛇头、多个关节模块、仿生蛇尾、多个舵机以及滚轮;
2.如权利要求1所述的仿生机器蛇,其特征在于,所述舵机通过螺纹连接的螺栓和螺母吊装于所述关节模块和所述仿生蛇尾内,所述舵机下侧的穿线空间用于安装线缆。
3.如权利要求1所述的仿生机器蛇,其特征在于,所述关节模块的关节外壳由上侧的矩形外壳和下侧的弧形外壳相连接构成;
4.如权利要求1所述的仿生机器蛇,其特征在于,相邻两个所述舵机之间的最大转角为30°;
5.如权利要求1所述的仿生机器蛇,其特征在于,所述仿生蛇头为前低后高的阶梯型结构,所述摄像头固定安装于前端台阶的顶面,所述仿生蛇头的前端面设置有用于使所述红外测距模块的探头露出的通孔。
6.如权利要求1所述的仿生机器蛇,其特征在于,所述无线传输模块为蓝牙。
7.如权利要求1所述的仿生机器蛇,其特征在于,所述仿生蛇头和所述仿生蛇尾的内部均设置有电池盒,所述电池盒分别用于固定安装所述第一电池和所述第二电池。
8.如权利要求1所述的仿生机器蛇,其特征在于,所述第一光源和所述第二光源均为led灯。
9.如权利要求1所述的仿生机器蛇,其特征在于,所述关节模块、所述仿生蛇头和所述仿生蛇尾均采用pla塑料制作而成。
10.如权利要求1所述的仿生机器蛇,其特征在于,所述第一电池和所述第二电池均为可充电锂电池组。
技术总结本发明公开了一种仿生机器蛇,该仿生机器蛇的仿生蛇头、多个关节模块以及仿生蛇尾通过舵机从前到后依次转动连接;仿生蛇头的外部固定安装有摄像头和第一光源,仿生蛇头的内部固定安装有红外测距模块、控制器以及第一电池;仿生蛇尾的内部固定安装有第二电池,仿生蛇尾外部固定安装有第二光源;控制器与红外测距模块、摄像头、第一电池、第一光源、第二光源、第二电池以及舵机相连;在仿生蛇头和每个关节模块的底端均安装有两个滚轮;在每个关节模块和仿生蛇尾内均固定安装有一个舵机。上述仿生机器蛇具有结构简单、造价低、移动灵活、可以模拟生物蛇的运动、实现运动和感应避障的特点,适用于抗震救灾中坑洞等细小空间人员搜索和救援。技术研发人员:董立春,庞中阳,李国良,李赫,刘哲,李瑞杰受保护的技术使用者:吉林大学技术研发日:技术公布日:2024/9/9本文地址:https://www.jishuxx.com/zhuanli/20240911/289860.html
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌抄袭侵权/违法违规的内容, 请发送邮件至 YYfuon@163.com 举报,一经查实,本站将立刻删除。
下一篇
返回列表